Следующий этап большой и, надеюсь, интересной серии обучающих постов о полётах в Orbiter. После того, как в предыдущем посте мы успешно состыковались с МКС, очевидная следующая задача — вернуться назад на Землю, совершив точную посадку с приемлемыми перегрузками.
Этот пост имеет цель:
- Рассказать о корабле ПТК НП.
- Дать представление о физике маневров торможения и посадки.
- Представить простое руководство для точной посадки в Orbiter.
Предыдущие посты
Этот цикл постов про Orbiter исходит из идеи последовательного увеличения сложности. Перед полётом по этой инструкции рекомендую ознакомиться с предыдущими постами:
История космонавтики. Наблюдение за полётами без активного участия.
«Бриз-М». Базовые маневры, выход на ГСО.
Полёт к МКС. Маневры для сближения и стыковки.
Немного истории и теории
Большой «бабах» челябинского метеорита очень наглядно показывает, что происходит с неподготовленным космическим телом, входящим в атмосферу с большой скоростью. Движение в атмосфере вызывает трение, которое, в свою очередь, приводит к нагреву. Если аппарат, входящий в атмосферу, не защищен специальными инженерными решениями, он разрушится.
Исторически, возвращение аппаратов с орбиты связано с пилотируемыми полётами и спутниками фоторазведки (возвращалась отснятая пленка). Первым объектом, возвращенным с орбиты, стала пустая капсула для плёнки (отрабатывалась технология) «Дискаверера-13», приземлившаяся 10 августа 1960 года. 18 августа вернулась капсула с отснятой пленкой «Дискаверера-14»:

а 19 августа приземлились Белка и Стрелка:

Торможение в космосе
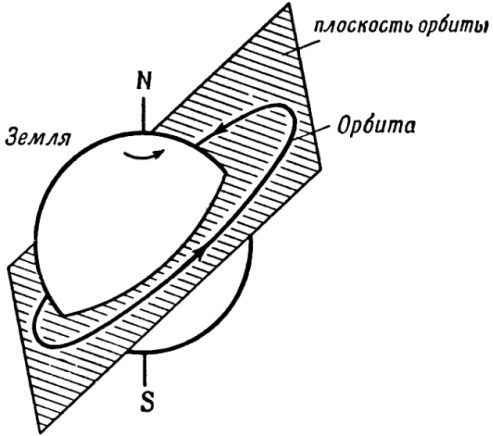
Первая задача, которую надо решить — определение времени выдачи тормозного импульса. Земля вращается вокруг своей оси, и место посадки вращается вместе с ней. Спутник же вращается по своей орбите, плоскость которой обычно наклонена относительно оси вращения Земли:
Если провести на карте линию движения спутника над Землей, то получатся синусоиды, которые со временем сдвигаются влево по карте из-за вращения Земли:
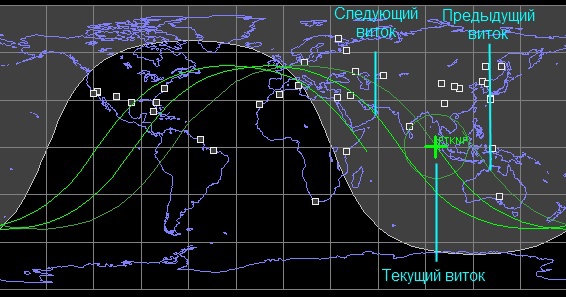
Поэтому, если мы хотим приземлиться в район посадки, это можно сделать далеко не на каждом витке. Но, зная орбиту корабля, можно предсказать, когда место посадки окажется в плоскости орбиты.
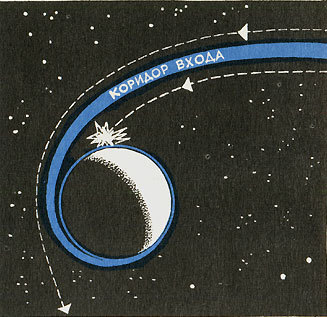
Вторая задача — выдать требуемый тормозной импульс. У каждого реального космического аппарата есть допустимый диапазон углов входа в атмосферу. Если угол слишком большой, то плотность атмосферы будет нарастать слишком быстро, и это вызовет недопустимые перегрузки либо недопустимую тепловую нагрузку на теплозащиту. Если угол слишком маленький, то атмосфера не сможет «захватить» аппарат, и он улетит обратно в космос.
Торможение в атмосфере
Третья задача — пережить торможение в атмосфере. Для этого аппараты оснащают специальной теплозащитой. Абляционная теплозащита сделана из множества слоёв асбестотекстолита, пропитанного обмазкой из фенолформальдегидных смол. Она медленно сгорает, как книга, по слоям, теряя со сгоревшим слоем принесенную извне температуру. Такая теплозащита одноразовая, она использовалась с начала космонавтики, широко используется и сейчас. Второй вариант — композитные материалы и керамика, из которых делаются многоразовые плитки, покрывающие аппарат. «Спейс-Шаттл» и «Буран» использовали этот вариант.
Четвертая задача — управление спуском. Изначально спуск был неуправляемым. Советские аппараты были круглые, они автоматически ориентировались в потоке как ванька-встанька и спускались по баллистической траектории. Такая схема очень надежная, она используется и сейчас в научных и биологических спутниках «Фотон» и «Бион». Американские аппараты использовали маневровые двигатели и закрутку для поддержания режима полёта теплозащитным экраном вперед. Баллистический спуск имеет серьезные недостатки — перегрузка достигает 9 g при возвращении с круговой орбиты, 12 g при возвращении с Луны, а район посадки измеряется в сотнях или даже тысячах квадратных километров. Поэтому разработчики космической техники стали разрабатывать аппараты с управляемой посадкой — «Аполлон» и «Союз». Идея, реализованная в них, одинаковая. Размещение центра масс вне оси симметрии приводит к тому, что аппарат летит под установившимся углом атаки, создающим подъемную силу:
Эта подъемная сила тратится на следующие действия:
- Замедление снижения аппарата, что растягивает торможение, уменьшая перегрузку.
- Управление снижением, что позволяет приземляться более точно.
При управляемом спуске у «Союзов» и «Аполлонов» перегрузка достигает 3-4 g, и отклонение от точки прицеливания обычно составляет несколько километров.
Посадка
Пятая задача — мягкая посадка. В США все корабли кроме шаттлов садились на воду. Вода «мягче» земли при посадке на небольшой скорости, а большой флот США позволял быстро и эффективно поднимать на борт приводнившиеся аппараты. В СССР на кораблях «Восток» космонавт катапультировался на высоте нескольких километров, чтобы, вместо удара о землю в аппарате, амортизировать удар ногами. «Восходы» и «Союзы» использовали парашютно-реактивную систему: парашют дает установившуюся небольшую скорость снижения, а перед самым касанием земли реактивные двигатели уменьшают её, в идеале, до нуля.
ПТК НП
Разрабатываемая сейчас Перспективная Пилотируемая Транспортная Система (ППТС), она же Пилотируемый транспортный корабль нового поколения (ПТК НП) — это корабль с достаточно долгой и интересной историей. И необходимо рассказать и объяснить, зачем он нужен, и почему он использует выбранные технические решения.
Зачем он нужен?
Это не праздный вопрос. Дело в том, что корабль «Союз» изначально создавался для полётов к Луне и, теоретически, может справиться с задачами, которые ставятся перед ПТК НП. За уже скоро пятьдесят лет эксплуатации «Союз» получил репутацию этакой космической «Газели» — не очень комфортного, тесного, но выносливого и надежного корабля. Зачем его менять на что-то новое? Однако, такие причины есть. Несмотря на все свои достоинства, «Союз» имеет недостатки, которые нельзя исправить модернизацией:
- Экономика. Одноразовые и полностью многоразовые корабли оказались не очень удачными крайностями. Частично-многоразовый корабль, в котором заменяются только расходные узлы типа теплозащитного щита, должен оказаться дешевле и проще в эксплуатации. «Союз» сделать частично-многоразовым нельзя — удар о землю при посадке нарушает гарантию на прочность корпуса. Можно (и так делается) снимать узлы с летавшего корабля и ставить на новый, но, поскольку это не предусмотрено конструкцией, получается не очень эффективно.
- Большой размер зон посадки. Сейчас зоны посадки «Союза» стали уже восприниматься как большие. Возможности маневрирования при спуске ограничены конструкцией спускаемого аппарата — высокая «фара» не может выйти на большие углы атаки. Точная посадка не совместима с раскрытием парашютов на высоте 10 км — за несколько минут спуска ветер может унести корабль на большое расстояние.
- Баллистический спуск. Режим баллистического спуска требует резервирования отдельного района посадки: первый район для управляемой посадки, второй — на случай срыва в баллистический спуск. Перегрузка в 9 g не понравится космическим туристам, а при возвращении с Луны перегрузка в 12 g уже становится опасной для здоровья. Хуже того, срыв в баллистический спуск при возвращении с Луны у «Союза» означает аварийное приводнение в Индийском океане, что сейчас уже никуда не годится.
- Теснота. Союз — достаточно тесный корабль. Конечно, космонавтам не привыкать преодолевать тяготы и лишения космического полёта, но, почему бы не убрать их, если это возможно? А если мы собираемся возить космических туристов, то и загрузить их лучше побольше, и условия им предоставить приемлемые.
- Маленький вес возвращаемого груза. Спускаемый аппарат «Союза» может вернуть всего 50 кг груза вместе с астронавтами, что доставляет неудобства.
- Небольшой запас характеристической скорости. Если мы собираемся лететь к Луне, то хочется иметь бОльший, чем сейчас, запас характеристической скорости (delta-V). Советская лунная программа была крайне, на уровне риска безопасностью полёта, ограничена по запасам топлива из-за недостаточной грузоподъемности ракеты Н-1, а простое увеличение приборно-агрегатного отсека «Союза» невозможно без, фактически, создания нового корабля.
- Ограничения носителя. Корабль«Союз» прочно привязан к ракете-носителю «Союз», которая сейчас выводит его без резерва по увеличению грузоподъемности. Пересадить корабль на «Протон», как это делалось в 60-е годы для лунной программы теоретически возможно, но крайне нерационально, потому что «Протон» постепенно сходит со сцены из-за своих недостатков.
Прощай, крылья
Одним из заметных технических решений, которые приняты на ПТК НП, стал отказ от крыльев (сравните с «Клипером» и «МАКСом»). ПТК НП — это капсула, немного похожая на американский «Аполлон». Дело в том, что крылья несовместимы с универсальностью. Они помогают совершать точную посадку, но эта выгода не сопоставима с потерями, которые возникнут, если разгонять бесполезную в космосе массу крыльев и аэродинамических поверхностей к Луне, базе в точке Лагранжа, астероидам или Марсу.
Особенная посадка
Вторым заметным техническим решением стала система посадки ПТК НП. Изначально она задумывалась полностью реактивной, потому что такая схема дает наибольшую точность посадки. Однако, полностью реактивная посадка вызывает вопросы безопасности, поэтому парашюты вернулись. В нынешнем виде система посадки состоит из следующих этапов:
- На высоте нескольких километров сбрасывается теплозащитный щит (как на Союзе).
- Три парашюта раскрываются на высоте 1,5 км. Поскольку используется три купола, запасной парашют не нужен (отказ одного купола дает допустимое увеличение скорости снижения).
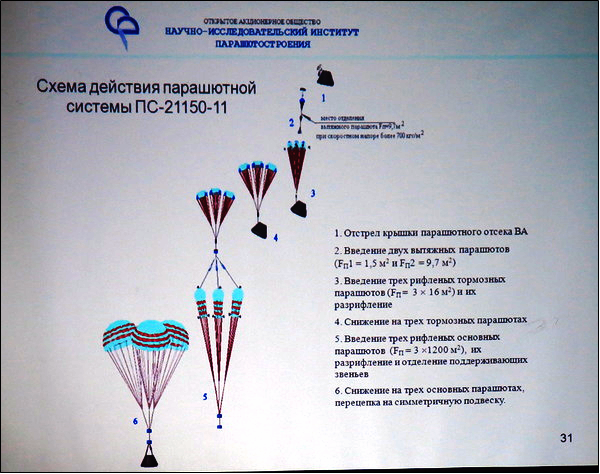
- Раскрываются посадочные амортизирующие опоры.
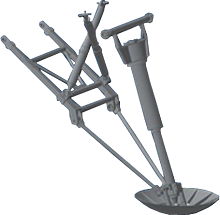
- Непосредственно перед касанием земли срабатывает сложная реактивная система посадки. Она парирует боковой снос ветром (если он есть) для вертикального снижения капсулы и уменьшает скорость снижения до мягкого касания.
- Энергия касания о землю амортизируется посадочными опорами и амортизирующими креслами экипажа (в качестве меры предосторожности).
Такая схема посадки, как ожидается, обеспечит попадание в квадрат 5х5 км при штатной посадке.
История разработки
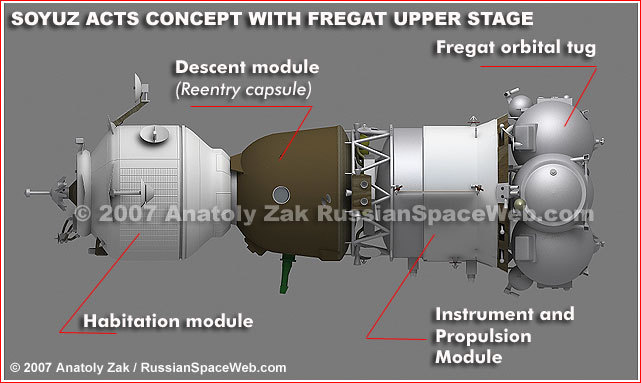
Начиналось всё, наверное, с идеи ACTS — совместного с ЕКА корабля для полётов к Луне, примерно в середине нулевых. Изначально планировался, судя по всему, модифицированный «Союз» с разгонным блоком «Фрегат» и совместным российско-европейским оборудованием:
К концу нулевых идея совместного с ЕКА корабля умерла, корабль стал разрабатываться как только российский, и, вместо модификации «Союза», стал создаваться с чистого листа. Характерным для конца нулевых стал спускаемый аппарат с наплывом маневровых двигателей сбоку:

С началом десятых годов наплыв исчез:
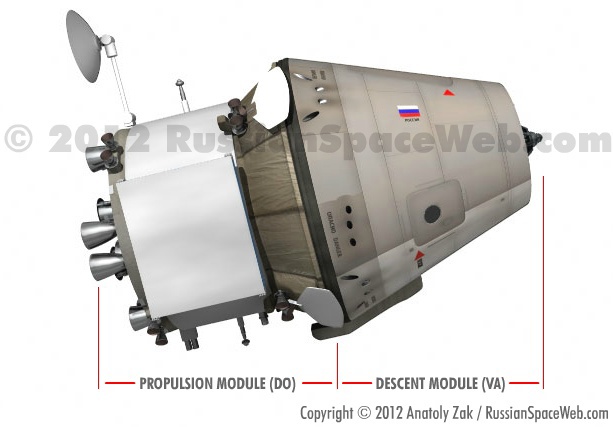
Именно эта модель реализована в Orbiter. Она уже устарела и не очень реалистична (зачем 8 маршевых двигателей?).
Самое последнее по времени появление корабля на публике — МАКС 2013:
Работы весьма активно ведутся, о них регулярно рассказывает ТВ Роскосмоса. Последний ролик — программа «Космонавтика», показанная в прошлую субботу:
Источники новостей
Отслеживать прогресс по ПТК НП можно по:
Подготовка к полёту
Для этого полёта нам необходимы:
План полёта
Этот полёт можно разделить на следующие этапы:
- Совмещение плоскости орбиты с местом посадки.
- Торможение для схода с орбиты.
- Управляемое торможение в атмосфере.
- Посадка.
Этап 1. Совмещение плоскости орбиты с местом посадки
Загружаем сценарий. Я выбрал сохраненный в прошлом посте полёт, так мне показалось интереснее, вы же можете воспользоваться вашими сохранениями или же загрузить сценарий PTK NP — Docked to ISS:
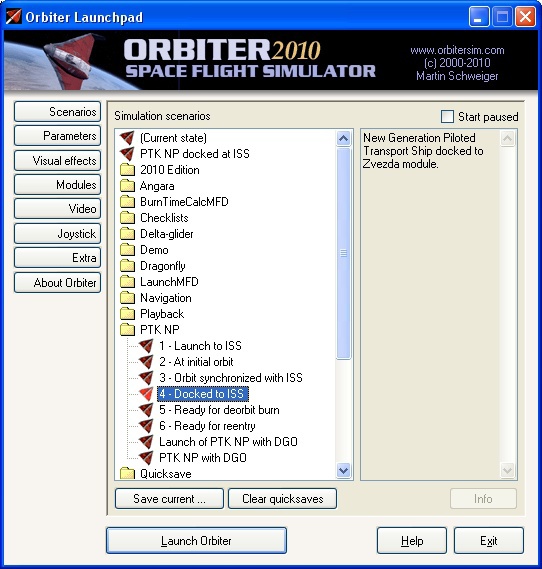
Итак, мы пристыкованы к МКС.

Мы хотим вернуться на космодром «Восточный», поэтому в МФД карты выбираем его как цель (правый Shift — T, Spaceports — Vostochny). Также, переведем левый МФД в режим Aerobrake (левый Shift — F1, левый Shift — E, выбор цели левый Shift-T, набрать Vostochny в появившемся окне). Ускоряя время, подождем, пока на следующем витке мы не будем пролетать над «Восточным». Расстыковываемся с МКС по Ctrl-D и дадим небольшой импульс для расхождения:

До свидания, МКС!
Этап 2. Торможение для схода с орбиты
После расхождения с МКС мы ждём, когда до Восточного останется 18 000 км, ориентируем корабль на торможение кормой вперед и даём импульс для схода с орбиты в момент, когда до Восточного останется 17 000 км.

Тормозим до тех пор, пока МФД Aerobrake не покажет недолёт 1000 км:

Недолёт нам нужен для утилизации аэродинамического качества.
Этап 3. Управляемое торможение в атмосфере
Перед входом в атмосферу необходимо ещё произвести разделение отсеков. Сориентируем корабль в положение против вектора орбитальной скорости (кормой вперед) и с нулевым креном. Есть хороший автоматический режим поддержания ориентации «по уровню горизонта» — L:
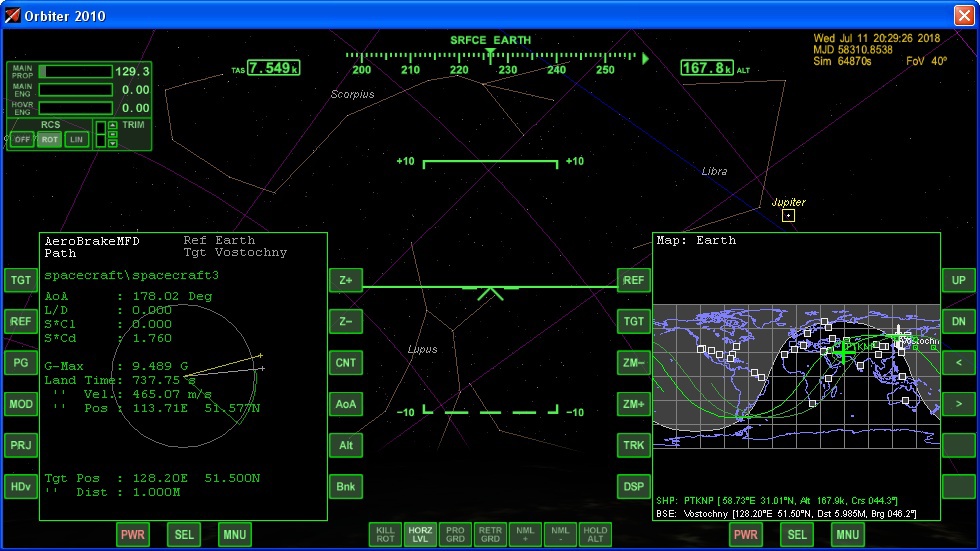
Дождемся высоты 150 км и отстрелим кабель-мачту нажатием K, сбросим приборно-агрегатный отсек нажатием J. К сожалению, после разделения отсеков сбросятся параметры МФД. Выберем снова «Восточный» как цель на Aerobrake MFD. Обратите внимание на изменение недолёта — МФД, к сожалению, считает только реальные данные, без прогноза. Нажатиями кнопок PRJ и PG переведем его в режим карты. Переведем правый МФД в режим атмосферного полёта (правый Shift — F1, правый Shift — S). Результат на картинке:

Двумя нашими способами управления будут триммер и крен. Триммер устанавливается кнопками Ins и Del блока над клавишами курсора и имитирует положение центра масс:
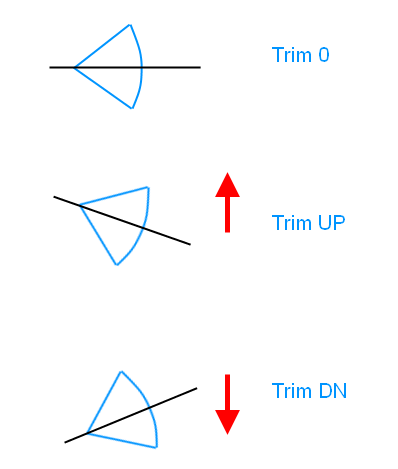
В реальности этот угол фиксированный, но тут, к счастью, мы можем его менять, это добавляет гибкости.
Изменяя угол крена мы можем создавать боковую составляющую подъемной силы для смещения к северу или югу. Если бы аппарат был более маневренный, можно было бы тратить избыточную энергию, двигаясь «змейкой», но у меня это не получилось.
На высоте 130 км, где появляются первые следы атмосферы, установим угол тангажа 10 градусов и установим триммер по максимуму вверх.

На 100 км самое время включить музыку в тему
В процессе снижения с началом воздействия атмосферы капсула установится на угол тангажа примерно 12 градусов. Возможны колебания, но не допускайте сильной раскачки, парируйте её режимом KILLROT (Num 5).
Высота 65 км, обратите внимание на уменьшение недолёта на левом МФД и индикацию заметной подъемной силы на правом МФД:

Высота 61 км. Капсула уже потеряла один километр в секунду и переходит в набор высоты за счет подъёмной силы:

Высота 50 км. На левом МФД сверху появляется трек нашего полёта:

Судя по треку, мы пройдем чуть южнее. Для того, чтобы сместиться к северу, нам надо наклонить корабль вправо. В этом случае, подъемная сила получит боковую составляющую, отклоняющую нас к северу. Необходимо соблюдать баланс между сохранением подъемной силы и смещением вбок, чтобы не сесть с недолётом.

На высоте ниже 40 км возвращаем корабль в более вертикальное положение — скорость падает, подъемная сила падает. Обратите внимание на перегрузку — 3,3 G — вполне комфортно, и она уже снижается. Такую перегрузку можно и в общественном транспорте испытать.

Ниже 15 км обнуляем триммер, нам он уже не поможет. Ошибка 12 км, жаль, больше, чем мне бы хотелось.

Посадка
На высоте не ниже 5 км сбрасываем люк парашютного отсека нажатием J. На высоте не ниже 3 км запускаем процедуру раскрытия парашютов нажатием K. На высоте 1 км сбрасываем теплозащитный экран нажатием J и раскрываем посадочные опоры нажатием G. Идём на посадку:
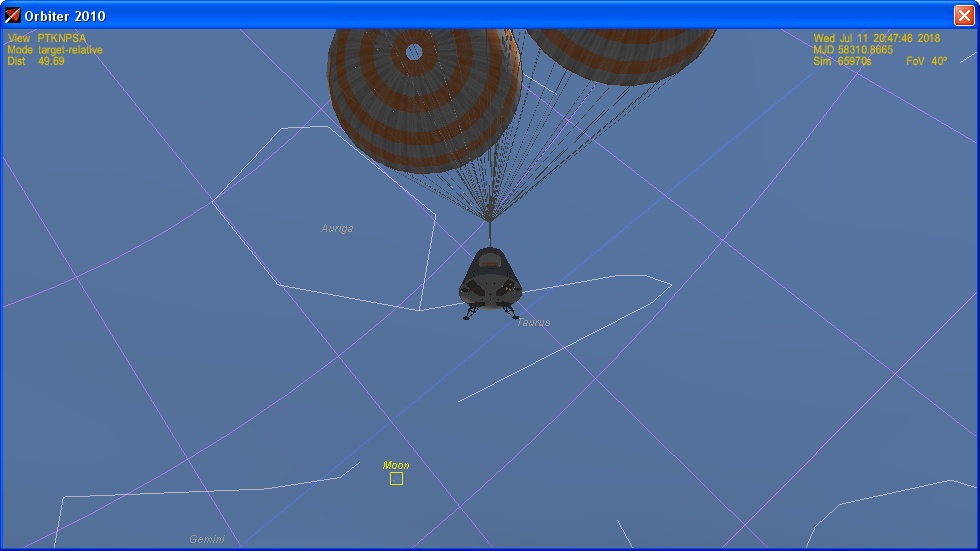
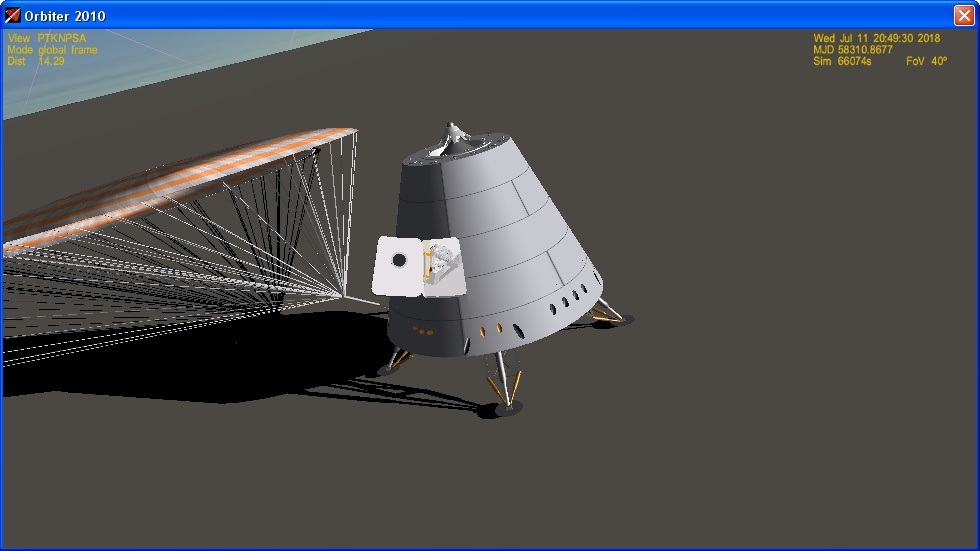
На высоте 30 м включаем тормозные двигатели (обычным способом — нажимаем Num + и фиксируем активацию кнопкой Ctrl)

По касанию земли (если успеете) отключаем двигатели. Складываем парашюты (левый Shift — Num 1) и открываем люк (левый Shift — Num 2). Есть посадка!
Заключение
Специфика управляемой посадки в том, что приходится действовать быстро, и нет возможности исправить ошибку. Поэтому хорошие результаты придут с практикой. Мой личный рекорд — 550 метров от точки прицеливания. Успехов в управляемой посадке!
На всякий случай — русскоязычный мануал. Для ПТК НП и прочих аддонов обычно есть документация, она находится в папках Doc или Add-on Docs.
За КДПВ спасибо сайту с картинами Леонова и Соколова.
Источник изображений ПТК НП — RussianSpaceWeb.