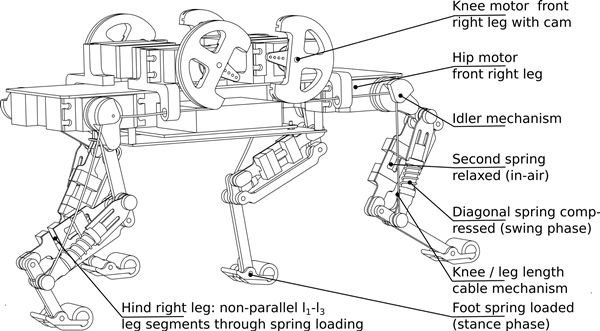
Робота приводят в движение восемь сервомоторов — по два на каждую ногу. Бедренные суставы присоединены к двигателям непосредственно, а коленные — через систему тросов. На ногах робота есть пружины, которые подобраны так, чтобы работать подобно мышцам и сухожилиям реального животного. Именно благодаря удачной конструкции ног робот способен бегать по слегка пересечённой местности — он держит равновесие только за счёт механической самостабилизации, работая в режиме open-loop.
В отличие от больших четвероногих роботов из Массачусетса, гепардёнок практически не содержит уникальных сложных деталей (гепард MIT использует специально разработанные электромоторы, а про конструкцию гепарда Boston Dynamics практически никаких данных в открытом доступе нет). Как говорят его конструкторы, робот достаточно дешёв, доступен и безопасен, что делает его идеальным кандидатом для исследований в области робототехники небогатыми учреждениями и даже энтузиастами-одиночками.
Научная работа с подробной информацией о роботе должна быть опубликована сегодня в журнале The International Journal of Robotics Research.
ссылка на оригинал статьи http://habrahabr.ru/post/183540/
Добавить комментарий