
Несколько месяцев назад в интернетах увидел пост на японском про создание BJD, шарнирной куклы, с применением трехмерной печати. Часть про трехмерную печать была интересной, но привела меня на сайт последняя часть поста. С картинками вроде этой:
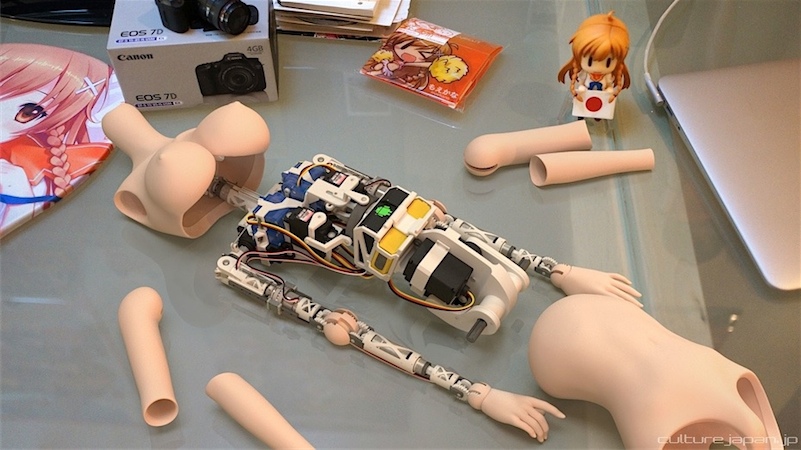
Хабравчане (и не только) возможно помнят, что очень пристально наблюдаю за двумя областями робототехники — андроидными роботами и любительскими гуманоидными роботами. Поэтому то, что было на этой картинке изображено очень заинтересовало.
В том посте автор писал, что он собирается сделать полностью роботизированную куклу-BJD и выпустить на рынок. Пост был опубликован первого апреля, и вместе с плохим знанием японского естественной реакцией оказалось «лол, хороший рендер». Впоследствии рассказ продолжился, в том числе и на уже знакомом английском, но до последнего рубежа, видео с роботом, всё ещё сохранял скептицизм. К счастью, видео появилось в прошлую пятницу. Тем самым показав состоятельность одного из самых интересных робототехнических проектов нынешнего года.

Но рассказ лучше начать с самого начала. BJD, шарнирные куклы — очень красивые, или даже кавайные куклы высотой около шестидесяти сантиметров, любимые в Японии и не только. Размер кукол по очень интересному совпадению оказался идентичен с золотым размером гуманоидных роботов, который составляет 50-80 сантиметров. Золотой размер это тот диапазон, в котором на нынешней базе можно создать насыщенного электроникой и механикой гуманоидного робота, без необходимости компромиссов из-за малого размера или сложного подхода из-за большого. Все боевые роботы стандартных классов, в том числе и однажды протестированный Bioloid, вписываются в этот размер.
Совпадение размеров заметили некоторые японские энтузиасты. «Формфактор» маленького человеческого тела кукол оказался не очень удобным для боевых роботов, но идеальным для роботов для хореографических конкурсов. И просто кавайных роботов.
Так Алиса и Кагуя, две знаменитые роботессы, созданы на базе японских BJD со вполне стандартными компонентами.

Менее знаменитая, но еще более продвинутая в техническом плане (хоть и исчезнувшая со сцены) Сомари тоже является измененной BJD с сервоприводами, электроникой, ушами и хвостом.

Все эти проекты индивидуальны, собраны и накодены вручную.
И Mirai Suenaga здесь сразу начинает выделяться. Мирай Суенага началась как нарисованная картинка-маскот для сайта Culture Japan, очень даже популярного в американских интернетах. Весной этого года автор собрался сделать BJD-версию Мирай, но не простую, а роботизированную. А самое удивительное — с заделом на массовое производство.

Сейчас робототехника выглядит как компьютерный мир в конце семидесятых, отданный суровым энтузиастам и промышленности с бизнесом. Danny Choo, автор сайта, (который недавно появлялся на Хабре в посте про автоматическую велопарковку), собирается же сделать реальную версию Сумомо, карманного персокома из Чобитов.

В мире аниме Чобиты компьютеры заменены андиродами-персокомами (зато дискеты еще существуют), которых можно подключить к монитору и получить обычный интерфейс, но самая главная фича персокомов — естественное общение с роботом. Это то, что первым делом пришло в голову, когда с нескрываемой радостью смотрел презентацию Apple Siri для пятого айфона. Сейчас голосовые ассистенты есть на всех мобильных платформах, еще конечно сырые, даже без базового псевдо-ИИ, но главный недостаток всех этих систем в необходимости говорить с куском стекла, алюминия и текстолита.
Возвращаясь к Мирай — автор с командой первым делом создал базу, примерно совпадающую по размером с нынешними BJD, используя все современные фичи вроде трехмерной печати, а затем создал «Aeon frame», электромеханическую часть, именно которая и превращает куклу в робота. При этом Aeon Frame есть план продавать отдельно.

(Картинка увеличивается и показывает всю схему).
Точек свободы не очень много, анимировано туловище и руки, но не реализована ходьба (очень сложная задача) и лицо с кистями рук (из-за размера это возможно только на искусственных мышцах или электроактивных полимерах, что дорого).

Большая часть мехатроники состоит из стандартных компонентов, но нестандартных немало, первое что бросилось в глаза, сервоприводы для рук. Приводы такого размера просто не выпускаются. Эти детали команде остается только проектировать самостоятельно.
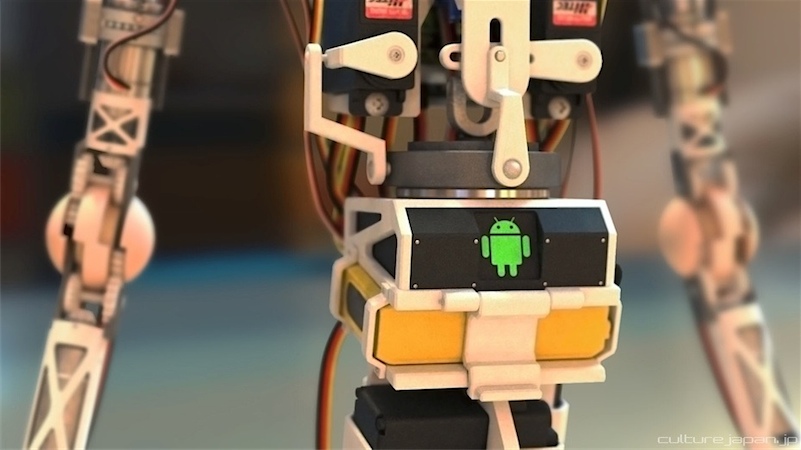
Однако железная часть это именно что часть. Посередине туловища запихнут низкоуровневый контроллер. В первых проектах там также был мозг, но сейчас его перенесли на правильное место, в голову, и это будет отдельный CPU Unit MiraiCore. К мозгу подключаются помимо контроллера все сенсоры, от прикосновения до камер, и прочая обязательная для робота мелочь. Технических деталей про то, что за компьютер будет контролировать робота, пока нет, кроме того, что он полностью спроектирован с нуля.

Но известно, что CPU Unit будет работать под ОС Android. Также под Андроид написана программа управления с «клиентской стороны». У Андроида есть потрясающее преимущество, что-то кодить под робота окажется суперпросто, особенно если команда создаст хороший API. Под андроид уже есть наработки по робототехнике, распознаванию речи и образов. Команда обещает псевдо-ИИ. После выпуска при громком выстреле проекта может получится очень благотворная для разработки платформа. Но самое главное здесь, что простая для не-гиков.

А вот наконец и то самое демо-видео прошлой пятницы.
Несколько недель назад написал автору сайта с предложением устроить вопрос-ответ для хабра, но ответа не последовало. Может быть после публикации тоже попробую потыкать виртуальной палочкой, но за проектом лучше всего следить на официальной странице. Проект стоит того, чтобы за ним следить.

Прогноз о цене и о реализации очень сложно давать, но цена готового комплекта Mirai Suenaga + Aeon Frame + MiraiCore вряд ли будет меньше 2500 долларов. Но честно, уже готов столько потратить.

ссылка на оригинал статьи http://habrahabr.ru/post/185400/
Добавить комментарий