Наверняка на новый год украшаете ёлку всевозможными гирляндами, и скорей всего они уже давным давно приелись однообразием своего мигания. Хотелось бы сделать что-то такое чтобы ух, прям как на столичных елках мигало, только в меньшем масштабе. Или на крайний случай — повесить на окно, чтобы эта прям красота освещала город с 5-го этажа.
Но увы, в продаже таких гирлянд нет.
Собственно, именно эту проблему и пришлось решать два года назад. Причем, из-за лени от задумки до реализации прошло как обычно 2 года, и делалось все в последний месяц. Собственно, у вас времени будет больше(или я ничерта не смыслю в человеческой психологии, и все точно так же будет делаться в последние 2 недели перед новым годом?).
Получилась достаточно несложная конструкция из отдельных модулей со светодиодами, и одним общим который передает команды с компьютера в сеть этих модулей.

Первый вариант модуля задумывался так чтобы подключать их в сеть по двум проводам, чтобы меньше путаницы и все такое — но не срослось, в итоге потребовался довольно мощный и быстродействующий ключ чтобы коммутировать питание даже малого количества модулей — явный перебор для простоты конструкции, поэтому предпочтение отдал третьему проводу — не так удобно, зато гораздо проще организовать канал передачи данных.
Как все устроено.
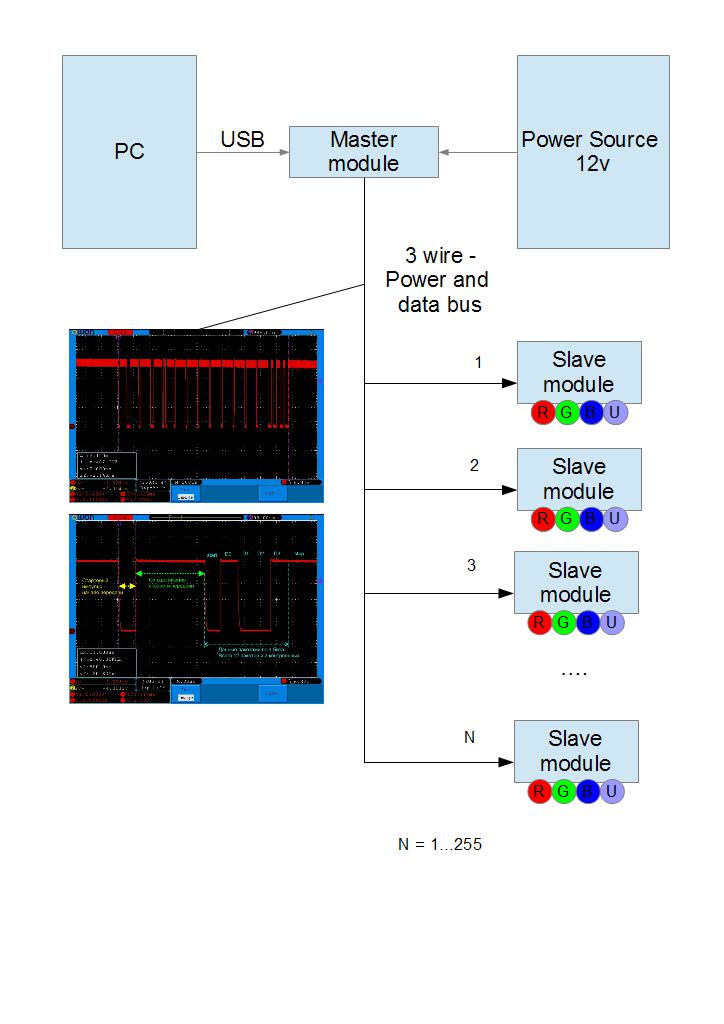
Разработанная сеть способна адресовать до 254 подчиненных модулей, которые далее будут называться SLAVE — они соединены всего 3-мя проводами, как вы уже догадались — два провода это питание +12В, общий и третий — сигнальный.
они имеют несложную схему:
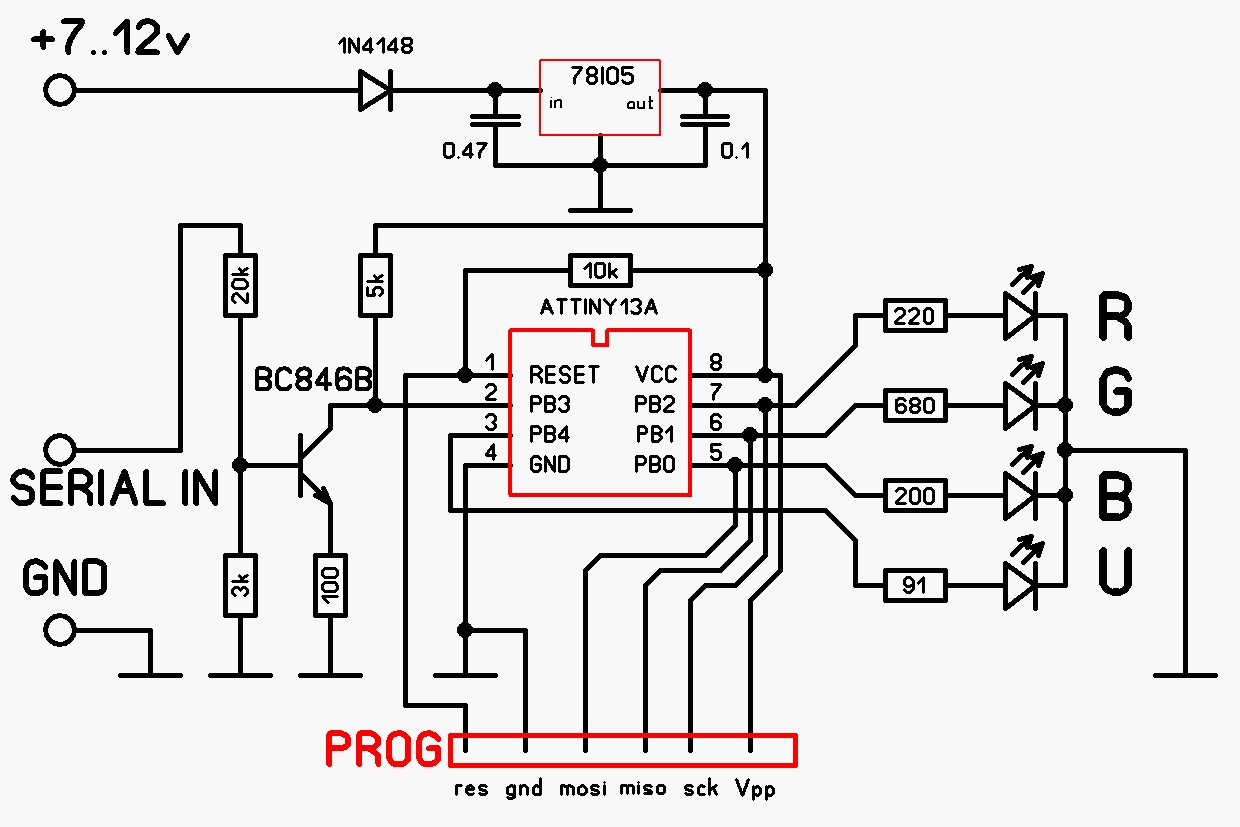
Как можно увидеть, она поддерживает 4 канала — Красный, Зеленый, Синий и Фиолетовый.
Правда, по результатам практического тестирования, фиолетовый хорошо видно только вблизи но зато как! Так же, из-за того что цвета расположены слишком далеко друг от друга смешение цветов можно увидеть только метров с 10, если использовать RGB-светодиоды ситуация будет несколько получше.
В целях упрощения конструкции так же пришлось отказаться и от кварцевой стабилизации — во-первых, лишний вывод забирает и во-вторых стоимость кварцевого резонатора довольно ощутима и в-третьих — в нем нет острой необходимости.
На транзисторе собран защитный каскад, чтобы не выбило порт контроллера от статики — линия все же довольно длинной может быть, в крайнем случае пострадает только транзистор. Каскад рассчитан в MicroCap и имеет примерный порог срабатывания около 7 вольт и слабую зависимость порога от температуры.
Естественно, в лучших традициях на адрес под номером 255 реагируют все модули — так можно их все одновременно выключить одной командой.
Так же в сеть подключен модуль называемый MASTER — он является посредником между ПК и сетью из подчиненных SLAVE-модулей. Помимо прочего он является источником образцового времени, для синхронизации подчиненных модулей в условиях отсутствия в них кварцевой стабилизации.
Схема:
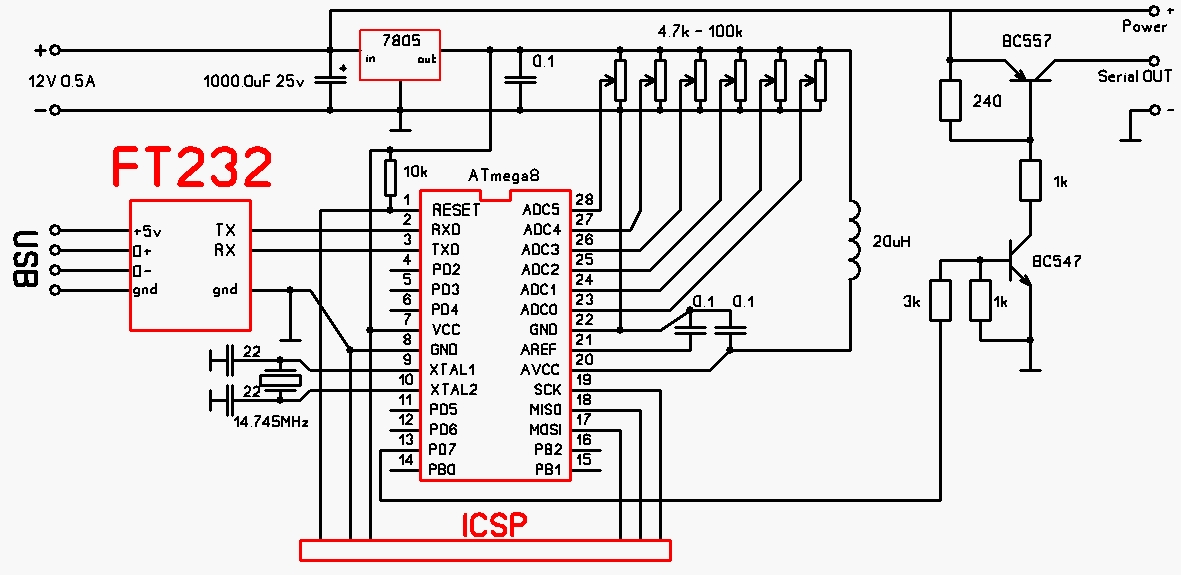
В схеме есть не обязательные потенциометры — их можно использовать в программе на ПК для удобной и оперативной настройки желаемых параметров, на данный момент это реализовано только в тестовой программе в виде возможности назначить любому из 4-х каналов любой из потенциометров. Схема подключается к ПК через преобразователь интерфейса USB-UART на микросхеме FT232.
Пример выдаваемого пакета в сеть:

Его начало:

Электрические характеристики сигнала: лог.0 соответствует +9…12В, а лог.1 соответствует 0…5В.
Как можно увидеть, данные передаются последовательно, с фиксированной скоростью по 4 бита. Это обусловлено необходимым запасом на ошибку по скорости приема данных — SLAVE-модули не имеют кварцевой стабилизации, а такой подход гарантирует прием данных при отклонении скорости передачи до +-5% сверх тех что компенсируются программным методом на основе измерения калиброванного интервала в начале передачи данных который дает стойкость к уходу опорной частоты еще на +-10%.
Собственно, алгоритм работы MASTER-модуля не так интересен(он достаточно прост — получаем данные по UART и переправляем их в сеть подчиненных устройств), все самые интересные решения реализованы именно в SLAVE-модулях, которые собственно и позволяют подстраиваться под скорость передачи.
Основным и самым главным алгоритмом является реализация 4-х канального 8-битного программного ШИМ который позволяет управлять 4-мя светодиодами при 256 градациях яркости каждого их них. Реализация этого алгоритма в железе так же определяет скорость передачи данных в сети — для программного удобства передается по одному биту на каждый шаг работы ШИМ. Предварительная реализация алгоритма показала что он выполняется за 44 такта, поэтому было принято решение использовать таймер настроенный на прерывание каждые 100 тактов — таким образом прерывание успевает гарантированно выполнится до наступления следующего и выполнить часть кода основной программы.
На выбранной тактовой частоте внутреннего генератора в 4.8Мгц прерывания возникают с частотой 48кГц — именно такую битовую скорость имеет сеть подчиненных устройств и с такой же скоростью наполняется ШИМ — в итоге частота ШИМ-сигнала составляет 187.5Гц, чего вполне достаточно чтобы не замечать мерцания светодиодов. Так же, в обработчике прерывания после выполнения алгоритма ответственного за формирование ШИМ фиксируется состояние шины данных — получается примерно по середине интервала переполнения таймера, это упрощает прием данных. В начале приема очередного пакета в 4 бита происходит обнуление таймера, это необходимо для более точной синхронизации приема и стойкости к отклонению скорости приема.
В итоге получается такая картина:
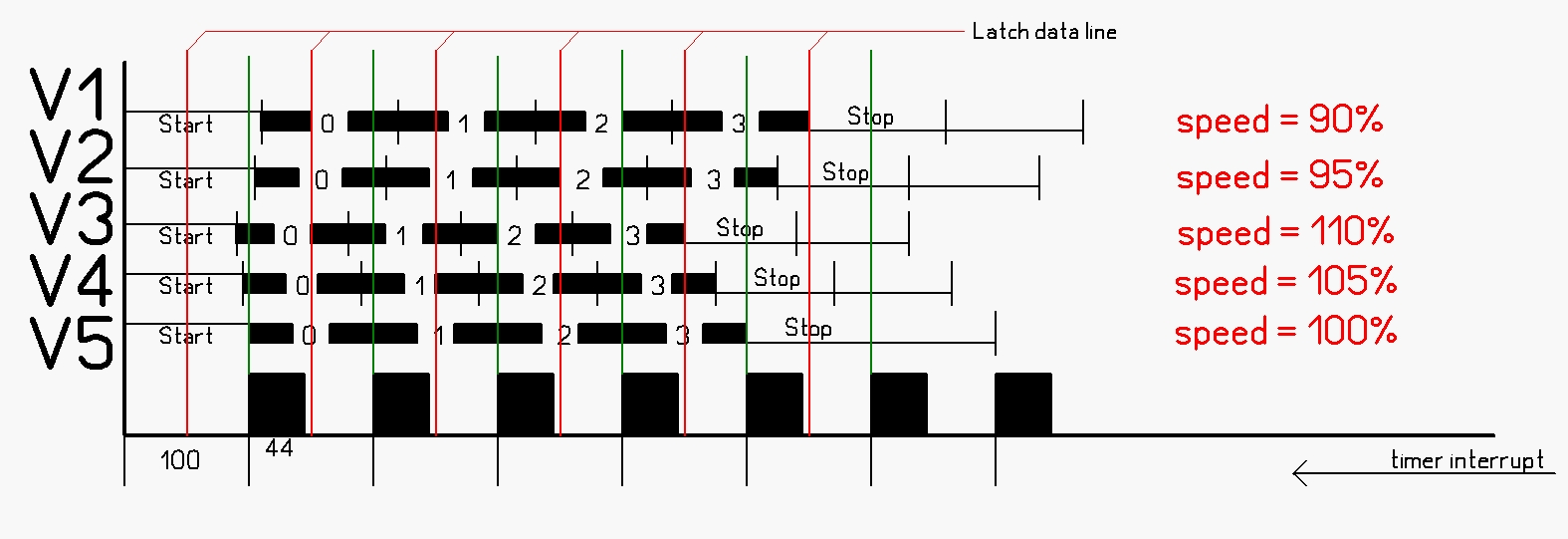
Интересна реализация алгоритма подстройки под скорость передачи. В начале передачи MASTER выдает импульс длительностью в 4 бита лог.0, по которым все подчиненные модули определяют необходимую скорость приема при помощи несложного алгоритма:
LDI tmp2, st_syn_delay DEC tmp2 ;<+ BREQ bad_sync ; | SBIC PINB, cmd_port; | RJMP PC-0x0003 ;-+ st_syn_delay = 60 — константа, определяющая максимальную длительность стартового импульса, которая принята примерно в 2 раза больше номинала (для надежности)
Экспериментальным методом было установлена такая зависимость получаемого числа в tmp2 при отклонении тактовой частоты от номинала:
4.3Mhz (-10%) 51 единиц (0x33) соответствует 90 тактам таймера для возврата скорости приема к номиналу
4.8Mhz (+00%) 43 единиц (0x2B) — соответствует 100 тактам таймера(номинал)
5.3Mhz (+10%) 35 единиц (0x23) — соответствует 110 тактам таймера для возврата скорости приема к номиналу
По этим данным были рассчитаны коэффициенты коррекции периода прерываний таймера(именно таким образом скорость приема подстраивается под имеющуюся тактовую частоту контроллера):
Y(x) = 110-x*20/16
x = tmp2 — 35 = (0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16)
Y(x) = (110, 108.75, 107.5, 106.25, 105, 103.75, 102.5, 101.25, 100, 98.75, 97.5, 96.25, 95, 93.75, 92.5, 91.25, 90)
Числа округлены до целых и занесены в EEPROM.
Если при подаче напряжения на модуль удерживать линию в логическом состоянии «1» включится подпрограмма калибровки, которая позволит измерить частотомером или осциллографом период ШИМ-сигнала без коррекции и на основании измерений судить об отклонении тактовой частоты контроллера модуля от номинальной, при сильном отклонении больше 15% может потребоваться коррекция калибровочной константы встроенного RC-генератора. Хотя производитель обещает калибровку на заводе и отклонение от номинала не более 10%.
На данный момент, разработана программа на Delphi позволяющая воспроизводить ранее составленный паттерн для 8-ми модулей с заданной скоростью. А так же утилита для работы с отдельным модулем(в том числе переназначение адреса модуля).
Прошивка.
для SLAVE-модуля необходимо прошить только фьюзы CKSEL1 = 0, и SUT0 = 0. Остальные оставить непрошитыми. Содержимое EEPROM прошить из файла RGBU-slave.eep, при необходимости тут же можно задать желаемый адрес модуля в сети — 0-й байт EEPROM, по умолчанию прошит как $FE = 254, по адресу 0x13 содержится калибровочная константа встроенного RC-генератора контроллера, на частоте 4.8Мгц она не загружается автоматически поэтому необходимо программатором считать заводское значение калибровки и записать в эту ячейку — это значение индивидуально для каждого контроллера, при больших отклонениях частоты от номинала можно изменять калибровку именно через эту ячейку не затрагивая заводского значения.
для MASTER-модуля необходимо прошить только фьюзы SUT0 = 0, BOOTSZ0 = 0, BOOTSZ1 = 0, CKOPT = 0. Остальные оставить непрошитыми.
Напоследок небольшая демонстрация гирлянды расположенной на балконе:
На самом деле, функциональность гирлянды определяется программой на ПК — можно сделать цветомузыку, стильное переливающееся освещение комнаты(если добавить драйверы светодиодов и использовать мощные светодиоды) — и т.д. Чем планирую заняться в будущем. В планах сетка из 12 модулей с 3-ваттными RGB-светодиодами, и комнатное освещение на основе кусочков 12-вольтной RGB-ленты(нужны только полевые транзисторы для коммутации ленты на каждый модуль по 3 штуки или 4 если добавить кусочек фиолетовой ленты других отличий от оригинала не будет).
Для управления сетью можно написать свою программу, хоть на бейсике — главное что должен делать выбранный язык программирования — уметь подключаться к бессмертным COM-портам и настраивать их параметры. Вместо интерфейса USB можно использовать переходник с RS232 — это дает потенциальную возможность управления световыми эффектами с широкого круга устройств которые вообще можно запрограммировать.
Протокол обмена с MASTER-устройством достаточно прост — посылаем команду и ожидаем ответ об её успешности или провале, если ответа нет больше нескольких милисекунд — имеются проблемы с соединением или работой MASTER-устройства, в таком случае необходимо провести процедуру переподключения.
На данный момент доступны следующие команды:
0x54; символ «T» — команда «test» — проверка соединения, ответ должен быть 0x2B.
0x40; символ "@" — команда «загрузить и передать». После подачи команды нужно дождаться ответа "?" далее следует 6 байт данных:
+0: Адрес подчиненного устройства 0..255
+1: Команда устройству
0x21 — байты 2…5 содержат яркость по каналам которую необходимо применить немедленно.
0x14 — установить тайм-аут, по истечении которого яркость по всем каналам будет
сброшена на 0 если за это время не поступит ни одной команды. Значение таймаута находится в ячейке красного канала, т.е. в байте со смещением +2. значение 0-255 соответствует таймауту в 0-25.5 сек по умолчанию, таймаут = 5 секунд(записан в EEPROM при прошивке, там же его можно и изменить в байте со смещением +1).
0x5A — изменить адрес устройства.
Процедура смены адреса для надежности должна быть выполнена троекратно — только тогда новый адрес будет применен и прописан в EEPROM. При этом надо быть осторожным -если прописать двум устройствам один адрес они будут реагировать синхронно а «разделить» их можно будет только физически отключив от сети лишние модули и сменив адрес у оставшегося, либо программатором. Значение нового адреса передается в ячейке красного канала — т.е. в байте со смещением +2.
+2: Яркость красного 0…255
+3: Яркость зеленого 0…255
+4: Яркость синего 0…255
+5: Яркость фиолетового 0…255
0x3D; символ "=" — команда «АЦП». После подачи команды нужно дождаться ответа "?" далее следует передать 1 байт — номер канала АЦП 0..7 в двоичном виде(ASCII цифры 0..9 тоже подходят в этом качестве, поскольку старшие 4 бита игнорируются).
В ответ команда возвращает 2 байта результата измерения в диапазоне 0…1023
Возможные ответы на команды:
0x3F; символ "?" — готовность к вводу данных, означает что устройство готово к приему аргументов команды
0x2B; символ "+" Ответ — команда выполнена
0x2D; символ "-" Ответ — команда не определена или ошибочна
Больше подробностей можно выудить из исходников расположенных на гитхабе, там же лежат последние версии готовых прошивок: github.com/Alexeyslav/RGBU_light
ссылка на оригинал статьи http://habrahabr.ru/post/191424/
Добавить комментарий