
Добрый день!
Хотелось бы немного рассказать о проекте AeroQuad Open Source и о своем опыте сборки квадрокоптера.
Проект AeroQuad поддерживает:
1. Возможность подключения gps. Есть возможность полета по путевым точкам, которые можно загрузить через AeroQuad Configurator. Если возможность самостоятельного возврата в начальное состояние.
2. Стабилизация камеры. Для компенсации движений квадрокоптера можно использовать 3 сервопривода.
3. On-Screen-Display. Наложение графики на видеопоток.
4. Помимо подключения гироскопа акселерометра и магнитометра есть возможность подключения других датчиков, таких как ультразвуковой дальномер и барометр.
У меня все началось с покупки Arduino Mega 2560 и когда просто мигать светодиодами надоело решил собрать квадрокоптер. Хотелось сделать руками хорошую игрушку. Процесс сам по себе очень интересный и увлекательный. Отличный вариант для знакомства с микроконтроллерами.
Если уделять времени примерно 2ч. в день, то через 2-3 недели можно будет протестировать свои квадрокоптер в воздухе.
Процесс сборки:
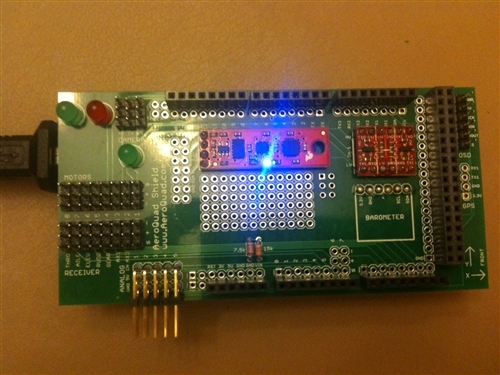
1. AeroQuad Shield v2.1 заметно сокращает количество проводов и упрощает процесс сборки. Можно купить тут за 30$ +доставка. Я покупал готовую, но доставка заняла около 6 месяцев. На первое время сделал такую.
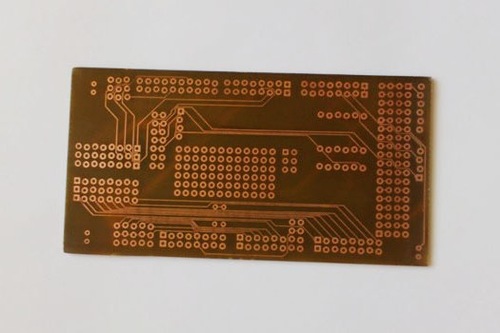
Исходники тут

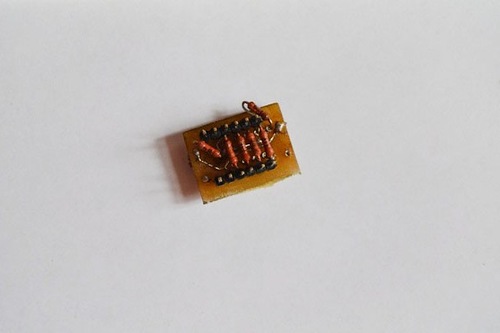
2. Logic Level Converter. Стоит примерно 2$.
(8 резисторов по 10Ком и n-канальный МОП транзистор 2шт. Итог: 8руб.)
Немного криво, но работает.
3. Arduino Mega 2560

3. 9DOF. На сайте AeroQuad стоит 99$. Тут 24$. (гироскоп ITG3205)
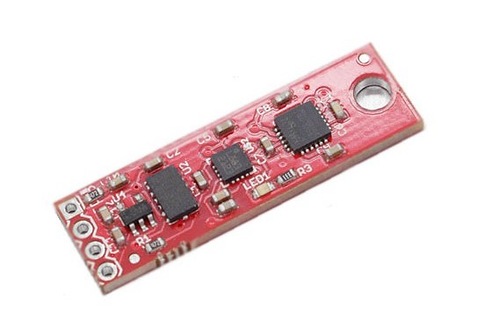
включает в себя: гироскоп ITG-3200 (ITG3205), акселерометр ADXL 345, магнитометр HMC5883L.
При пайке нужно быть предельно осторожным, у меня гироскоп испортился от статического электричества, пришлось перепаивать. Новая микросхема стоила 700р.
4. Барометр BMP085 (20$)
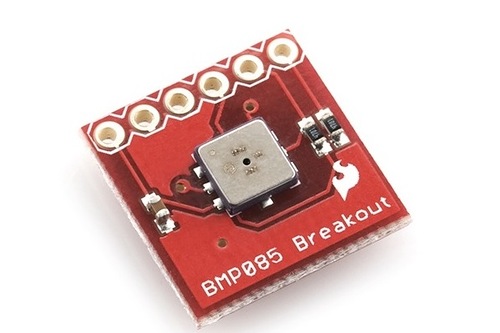
В сборе должно получиться так:
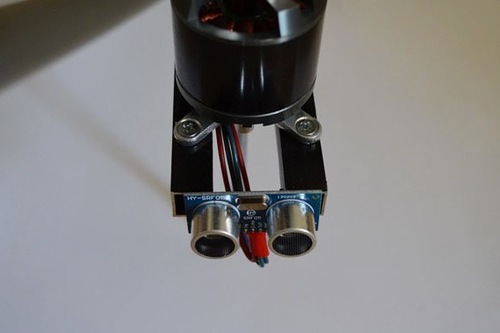
5. Ультразвуковой датчик. LV-MAXSONAR-EZx (от 1500руб. за шт.) я использовал немного другой.
6. GPS.

7. РУ. Народная аппаратура РУ Turnigy 9x. 60$

8. Двигатели. NTM Prop Drive 50-50 580Kv/2000W (37$ за 1шт.) + NTM Prop Drive 50 Series Accessory Pack (2$ за 1шт.)


С двигателями конечно перебор. Вполне хватило бы NTM Prop Drive 28-36 1200KV / 530W.
9. Контроллеры. HobbyKing 100A ESC 4A UBEC (40$ за 1шт.)

10. Аккумуляторы:
Turnigy nano-tech 4000mah 3S 25~50C Lipo для FPV ($28.51$)
Turnigy nano-tech 1600mah 3S 25~50C Lipo для РУ (14.92$)
Turnigy nano-tech A-SPEC 5000mah 6S 65~130C Lipo (145$)

11. Turnigy Accucel-6 50W 6A Balancer/Charger

12. FPF
На вопрос, какой комплект для FPV выбрать, однозначного ответа нет.
Что касается частот:
900Mhz- диапазон с хорошей проникающей способностью, но оборудования не позволяет летать на большие расстояния.
1.2/1.3 GHZ – хорошая частота с большой дистанцией передачи. Большой выбор комплектов от разных производителей по разным ценам и качеству.
2.4 GHZ – дистанция и проникающие способности чуть ниже, зато возможно передать видео лучшего качества.
5.8 GHZ – маленькая дальность и проникающая способность. Плюс данной частоты – свободный, чистый эфир.
Для себя выбрал: 1.2ГГц, 1Вт.

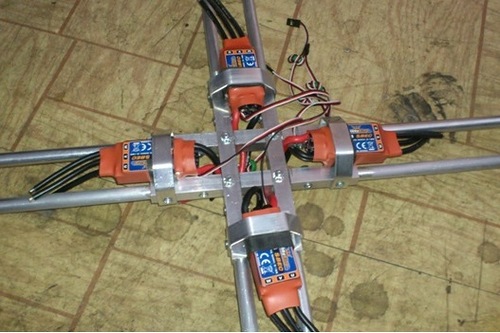
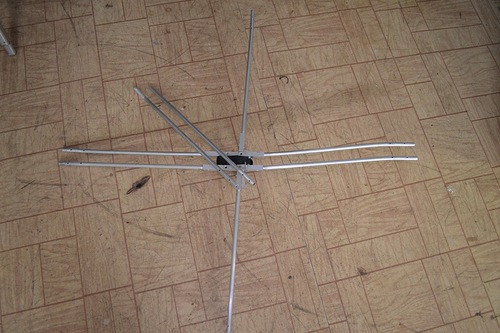
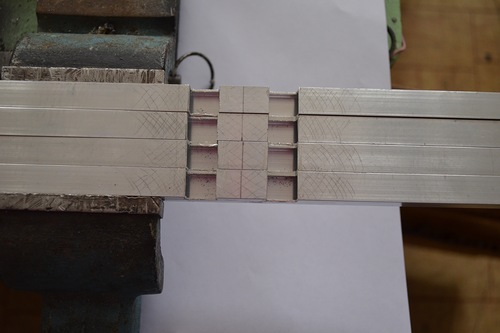
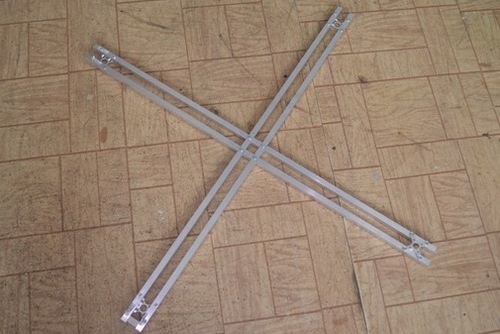
Каркас.
Можно найти полно всяких вариантов от самоделок до готовых решений. Для себя решил делать из алюминиевого профиля.
Первый вариант, оказался не очень удачным.


После неудачного приземления пришел в негодность.
Второй раз получилось немного крепче.

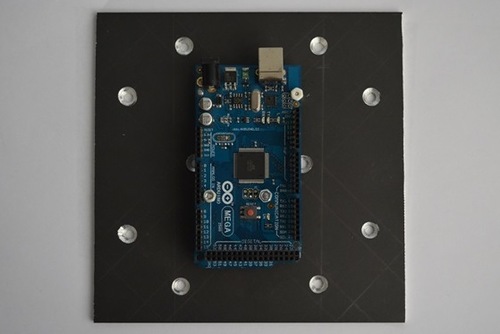
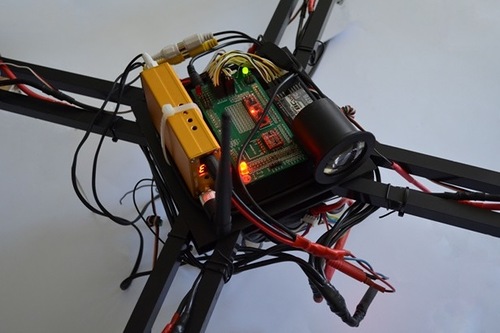
Для защиты платы немного поколхозил. Зато дёшево, надёжно и практично.

Покрашенный и готовый для первых тестов.
Процесс настройки очень прост:
1. Устанавливаем Arduino IDE.
2. Компилируем AeroQuad_v3.2.
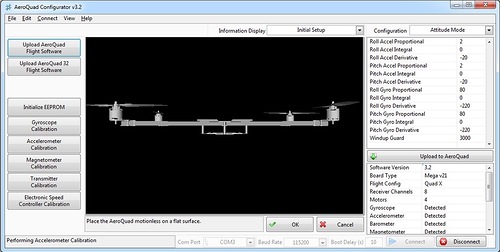
3. В программе AeroQuad Configurator необходимо следуя инструкциям поочередно выполнить калибровку всех датчиков.
Вообще, все подробные инструкции по сборке есть тут.
Один совет: пропеллеры лучше покупать с запасом.
Видео сейчас выкладываю только первых пробных полетов, перед калибровкой сенсоров, снятое в помещение с привязанным к полу квадрокоптером.
Остальные видео только после замены сломанных пропеллеров, жду посылки.
ссылка на оригинал статьи http://habrahabr.ru/post/217345/
Добавить комментарий