Первый блин вышел комом. Результат эксперимента получился, как говорится: «третий сорт — не брак», с некоторыми серьезными оговорками и «граблями», но основная цель эксперимента была достигнута. Идея получить HD FPV по
Как я и предполагал, публикация на хабре не только
Что было реализовано, исправлено и дополнено
- Эксперимент 1. Используемые антенны с круговой поляризацией. «клевер» на земле и на борту.
- Эксперимент 2. Используемые антенны с линейной поляризацией. На земле секторная 70град х 70град, на борту «штырь».
- Запись принимаемого видеопотока на земле, для дальнейшего анализа.
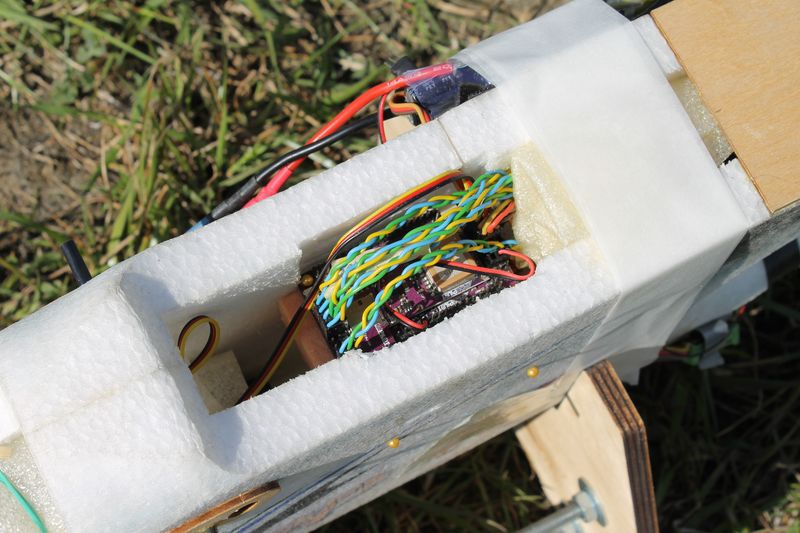
- Борт с полетными «мозгами» Ardupilot 2.0 для стабилизированного полета. В случае потери связи (визуальной, видео, РУ) с бортом, возможность автоматического возврата на базу.
- Исправлен досадный баг
ДНКпрошлого эксперимента. Оба вайфай модуляжглиработали на полную мощность 28dBm.
Матчасть
Антенное хозяйство на земле. В зависимости от эксперимента к ВЧ разъему вайфай модуля подключался, либо «клевер», либо секторная антенна.

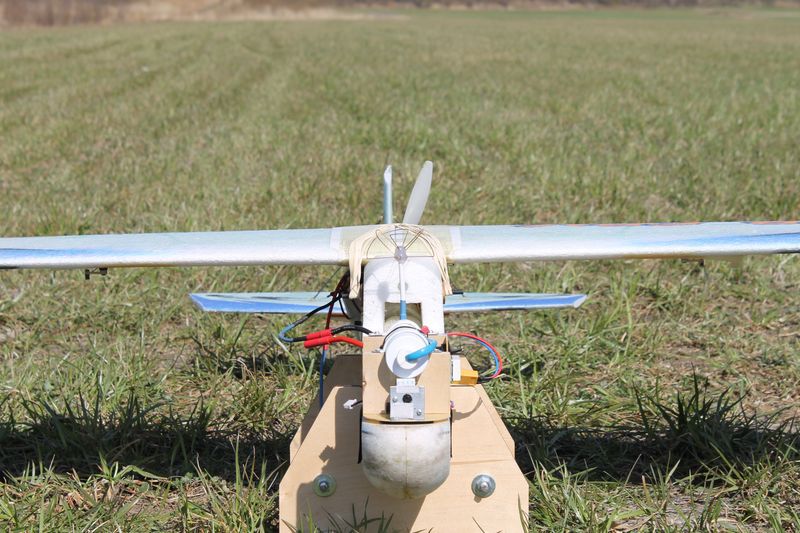
Борт со «штырем»

Борт с «клевером»
Ардупилот 2.0
Много видео
Тестовый полет на штыревой антенне, на земле секторная.
Тестовый полет на «клеверах»
Результаты оказались на удивление весьма неплохие. Объективно «клевер» отработал лучше, поэтому все дальнейшие тесты проводились на «клеверах».
Тестовые полеты на дальность проводились в двух разрешениях HD 1280×720 и 800×600
1280х720
800×600
За это разрешение прошу не ругать… мол обещано HD, а тут не оно. Исключительно в целях эксперимента. В дальнейшем будут тесты вплоть до 320х200
Радиус уверенного приема перевалил за 700 метров!

Решили протестить Full HD
1920×1080
Результат немного предсказуем, недалече… но РАБОТАЕТ!
Еще тесты на дальность и посадка по монитору. Тут придется поверить на слово… пилот действительно сажал пенолет силой мысли глядя в монитор наземного компьютера.
800×600
Выводы и ближайшие планы
По сравнению с прошлым экспериментом результат значительно улучшился. Система работает и есть куда летать копать дальше. Вопрос взлетит или не взлетит уже не стоит. Однозначно HD FPV взлетел!
- Более детально продумать расположение антенны на борту.
- Протестировать вариант с потолочной антенной линейной поляризации (она уже ожидает на почте).
- Протестировать работу системы на высоте — это потребует переделки пенолета, т.к. он не шибко силен и в высь забирается очень
печальномедленно. - Опробовать 5.8 ггц модули, тут есть интересное предложение от хабраюзера kunks.
- Отдельным фронтом работ открываются возможности по реализации OSD — наложение полетной информации на транслируемую картинку. Пилоту уже очень надо
наводить борт на цельполучать высоту и напряжение бортовой АКБ. - Интересно построить GPS треки полетов и совместить их с видео, для более глубоких экспериментов и анализа эффективной дальности.
В наличии уже имеется USB GPS, подключал его к малине, NMEA валит так, что не остановить. В наличии решение с подключением гироскопа MPU-9150 по шине I2C к малине, можно конечно требуемые данные получать с Ardupilot… тут вопрос пока открытый.
ссылка на оригинал статьи http://habrahabr.ru/post/220953/
Добавить комментарий