
Привет, Хабр!
Сегодня я хочу показать простой пример идентификации системы, основываясь на наблюдениях и экспериментальных данных. Это первая и крайне важная ступень в разработке системы управления устройством, которое описать аналитически либо невозможно, либо слишком сложно, либо неохота. Для начала рассмотрим метод «черного ящика с котом», «серый» и «белый» методы оставим на следующий раз.
Интересующихся прошу под кат.
Оборудование и программное обеспечение в наличии
WatchdogWatchduck:

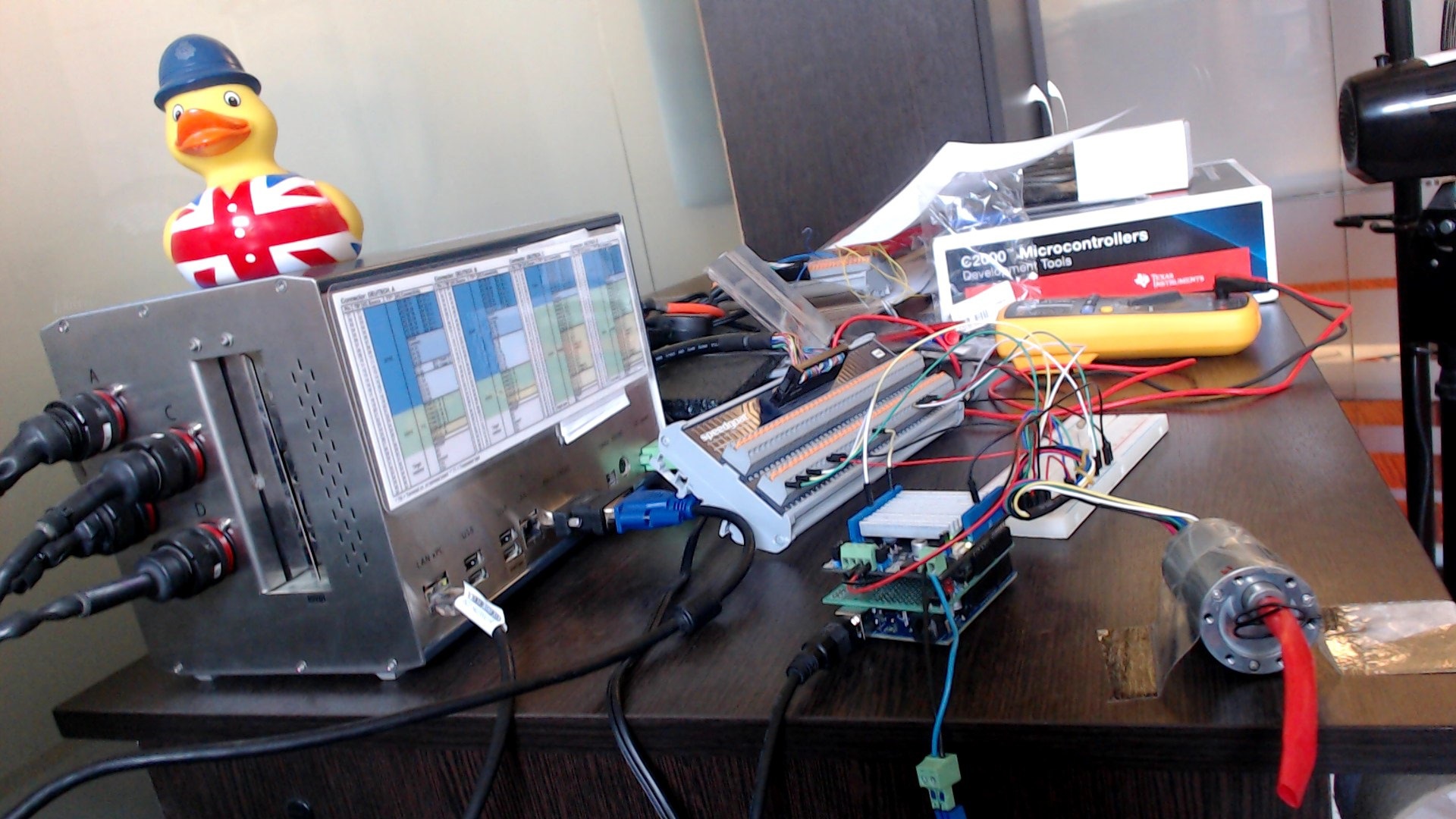
Выполняет ту же функцию, что и Watchdog timer, но применительно к инженеру — помогает выйти из зависания.- Машина реального времени Speedgoat. Немного проще, нежели на заглавной иллюстрации, примерно такая:

В данном ПК (а это по сути и есть IBM совместимый ПК) присутствуют платы ввода-вывода с аналоговыми, дискретными, и прочими входами и выходами, которые я использую как для сбора данных, так и для управления ходом эксперимента. Но самое главное — я могу одним нажатием запускать на ней модели Simulink в режиме жесткого реального времени. О таких машинках (да простят мне уменьшительно-ласкательное дальнейшее к Ней обращение:-) я много еще могу рассказать. Если интересно — можно выделить для этого отдельный топик.
- MATLAB/Simulink

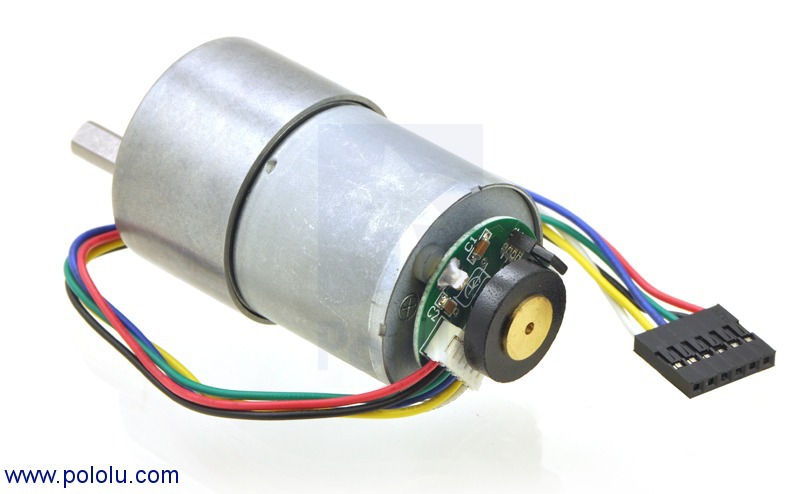
Инструментам я не изменяю. Как и в предыдущих моих постах, я буду использовать Simulink для создания моделей, генерировать из них код и запускать его на интересных железках. - Двигатель постоянного тока с энкодером и зубчатой передачей от Pololu. Вот такой:
- Arduino + Motor Shield от seeedstudio

Для работы с Arduino из-под Simulink я использую библиотеку Embedded Coder Target for Arduino.
Эта библиотека позволяет использовать модели Simulink для генерации кода полностью готового к компиляции под данную платформу. Можно использовать также встроенную поддержку Arduino в MATLAB/Simulink, но мне данный таргет более по душе. - Макетная плата, проводники, питание и прочая мелочевка
На самом деле, любой из представленных компонентов может быть заменён на соответствующий функциональный аналог. Но, так как делалось все «на коленке» — то и право выбора остается за владельцем этого важного сустава.
В собранном виде, если это можно назвать собранностью, все выглядит так:
Постановка задачи
Есть система — необходимо получить её модель для дальнейшей работы. Проще некуда.
Поведение системы и её модели должно максимально совпадать в пределах допустимых входных воздействий. Метод «черного ящика» подразумевает, что мы не будем, или почти не будем, принимать во внимание физику процессов внутри системы, а будем рассматривать её с общей точки зрения теории управления.
В детали я вдаваться в этот раз не буду, поначалу все и так видно, на глаз.
Но следует учесть, что за кулисами остаются архиважные и преинтереснейшие темы — планирование эксперимента (DOE) и дисперсионный анализ (ANOVA), которые заслуживают отдельного рассмотрения.
Целевая система в некотором приближении и с упрощением состоит из следующего набора подсистем:
- Дискретная подсистема — Arduino
- Непрерывная механическая подсистема — двигатель
- Непрерывная электрическая подсистема — Motor Shield
Вход системы — заданное значение ШИМ 0-100%.
Еесть возможность изменять скважность ШИМ сигнала, подавая на выход «аналогового» порта Arduino значения uint8 от 0 до 255. Необходимо узнать, как будет реагировать силовая электроника и двигатель на это воздействие.
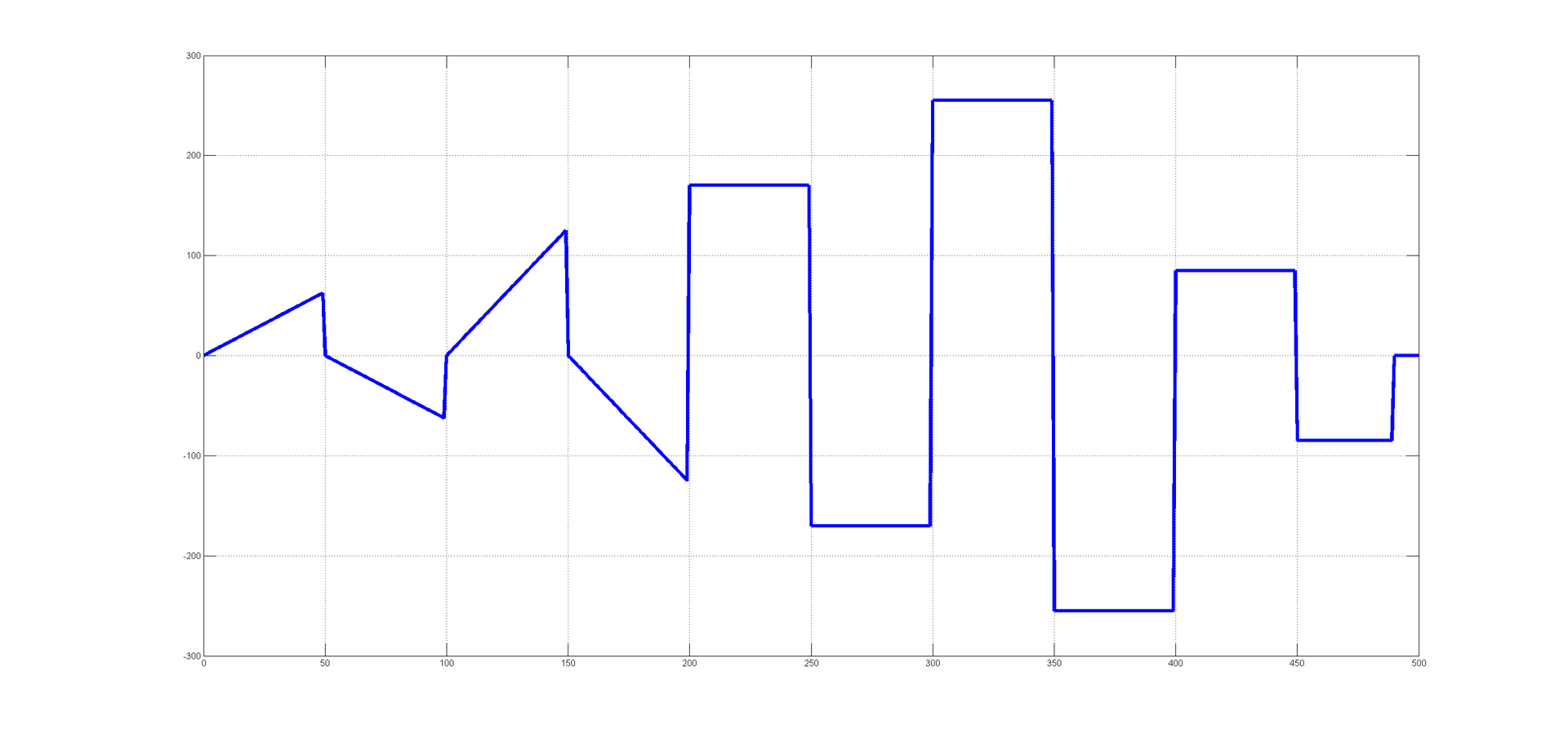
Тестовый вектор будет зашит в контроллер, состоит он из 501 элемента и выдается с дискретизацией 0.04с. Итого ~20 секунд тестового воздействия.
Выглядит тестовый вектор так:
На выходе системы я ожидаю увидеть хоть что-то подобное 🙂
Для успешной идентификации тестовый вектор должен покрывать максимальное количество режимов работы системы, в которых она будет, или может работать. Метод «черного ящика» не позволяет в полной мере исследовать аварийные режимы ввиду ограниченности количества экспериментальных образцов. Я буду исследовать систему в рабочих режимах плавного пуска и старт-стоп.
Выход системы — скорость вращения вала, угол поворота вала. С квадратурного энкодера, при вращении вала двигателя, я получаю два меандра со смещением по фазе на pi/2. Их обрабатывает аппаратный декодер, который присутствует на одной из конфигурируемых плат ввода-вывода. При загрузке модели Simulink на машину реального времени происходит «прошивка» ПЛИС (FPGA) для обеспечения требуемых входов/выходов. Тики, с декодера умножаем на коэффициент и превращаем в угол, а скорость изменения их количества в скорость. Энкодер двигателя делает 64 триггирования за один оборот, что позволяет с хорошей точностью отслеживать описанные выше параметры. Основной алгоритм на машине реального времени установлен мною на работу с частотой 10 kHz — на выходе я получаю экспериментальные данные с периодом дискретизации 0,0001с. Аппаратная же часть ПЛИС работает на частоте 33 MHz, что позволяет, помимо основного алгоритма декодирования, успевать применить еще и антидребезговые алгоритмы без ущерба точности измерениям на довольно высоких оборотах. Простыми словами декодирование квадратурного сигнала на FPGA описано в прекрасной статье fpga4fun —> QuadratureDecoder.
Дискретизация величин, временные задержки, моменты инерции механических деталей, трение спокойствия, трение скольжения, трение качения, механический люфт, разбалансировка, резонансные явления, коммутация индуктивных цепей, скользящий контакт, искрение — не полный перечень факторов, с которыми нам пришлось бы столкнуться при попытке описать данную систему аналитически. А ведь это — всего лишь ардуинка с моторчиком!
Соглашусь, некоторыми нюансами вполне можно пренебречь, но на практике, решение пренебречь каким-либо фактором — не самое простое решение.
Так выглядит ШИМ из Arduino (желтый) и напряжение на чисто резистивной нагрузке, которая подключена к шилду:
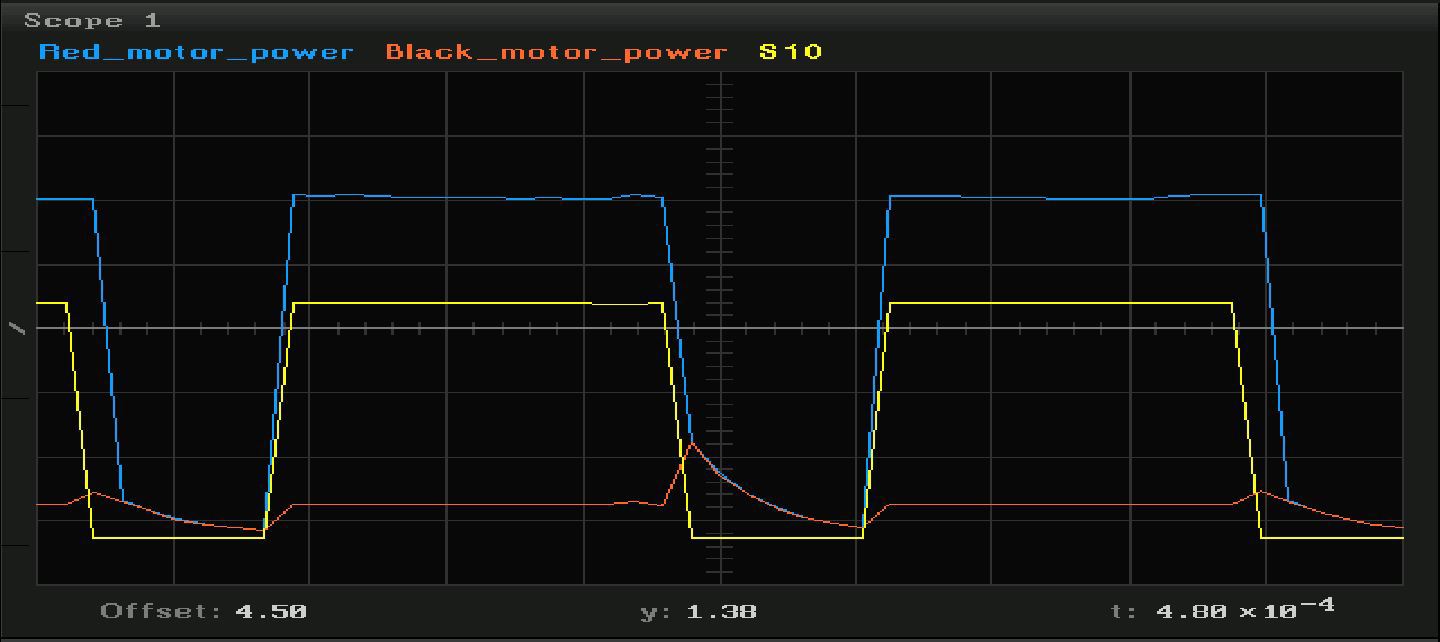
А вот графики при подключенном двигателе в режимах, когда двигатель еще не вращается, и уже вращается:
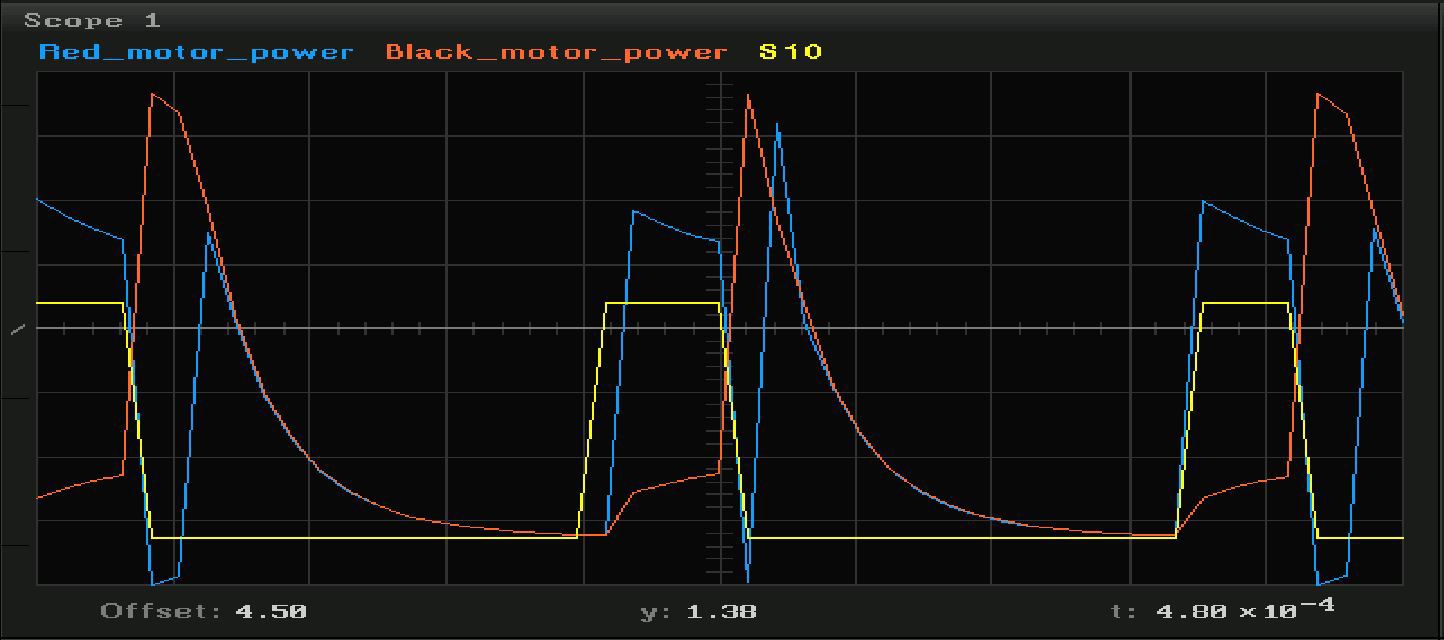
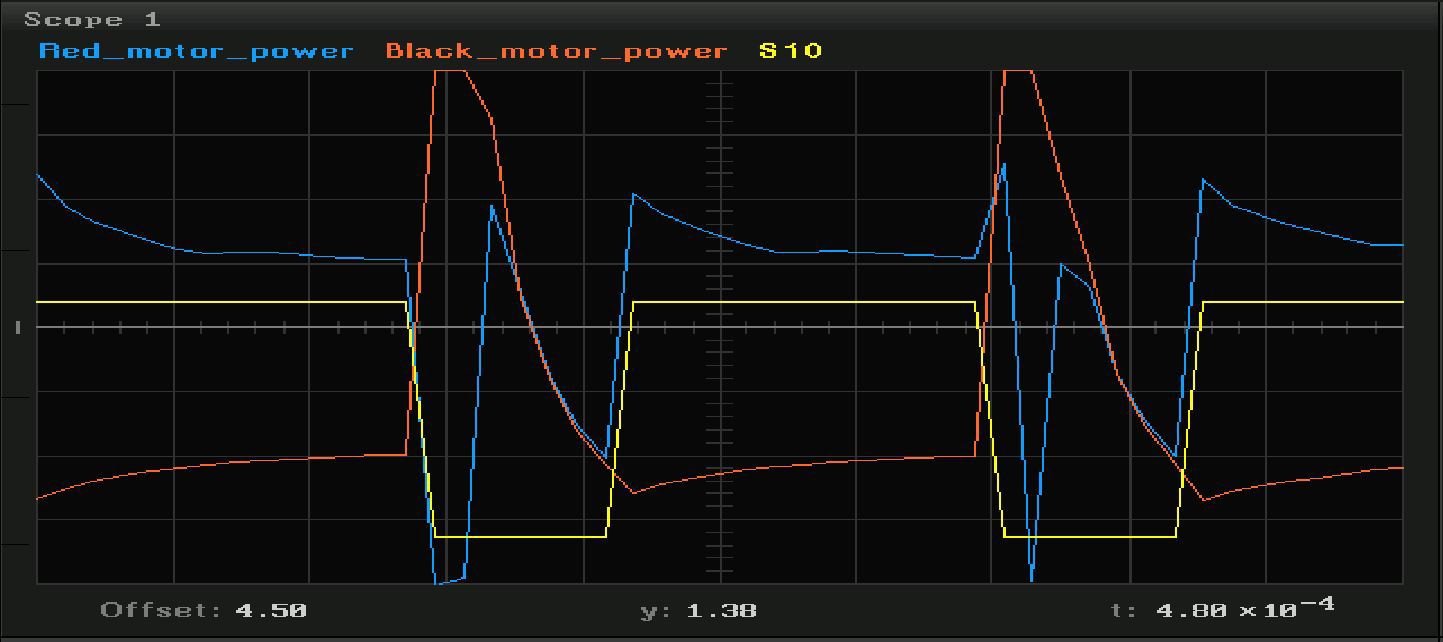
Коммутация индуктивной нагрузки с механическим контактом полупроводниковыми ключами — крайне интересная тема для исследований, но сегодня мы внимания ей уделять не будем. Мы срежем по прямой — будем рассматривать только вход и выход системы, не вникая в физику процессов.
Модели Simulink
На машине реального времени я запускаю вот такую модель:
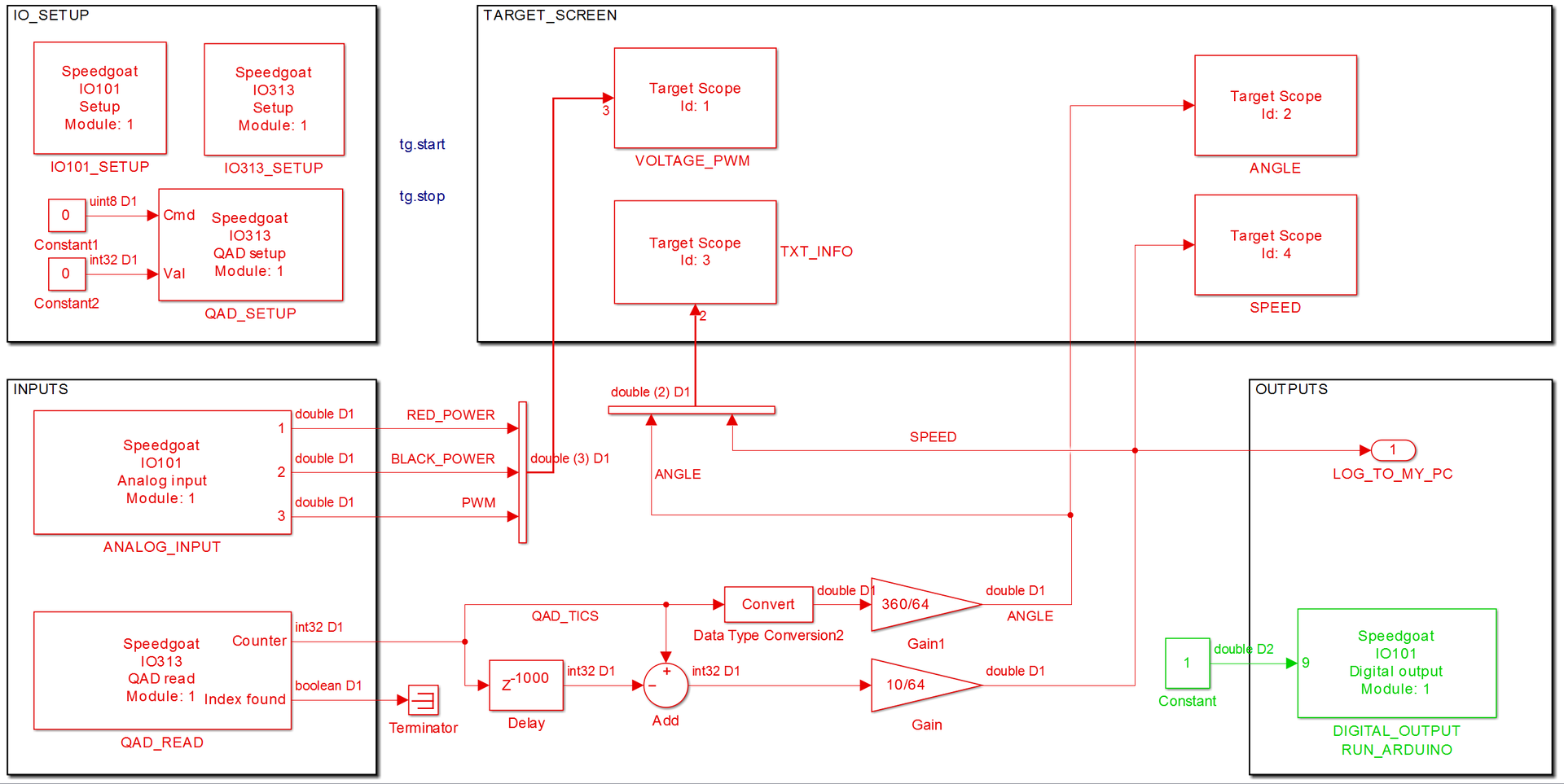
Структура её крайне проста. Есть блоки для входов, выходов, общие настройки плат ввода-вывода, вывод информации на дисплей машинки и простая внутренняя логика пересчета тиков от квадратурного энкодера в угол и скорость.
Модель для получения прошивки под Arduino выглядит следующим образом:

Таблица истинности, которая отслеживает знак сигнала и управляет входами Motor Shield

Код алгоритма можно посмотреть под спойлером:
// // File: arduinoTestVector.cpp // // Code generated for Simulink model 'arduinoTestVector'. // // Model version : 1.229 // Simulink Coder version : 8.6 (R2014a) 27-Dec-2013 // C/C++ source code generated on : Thu May 22 14:47:55 2014 // // Target selection: arduino_ec.tlc // Embedded hardware selection: Atmel->AVR // Code generation objectives: // 1. Execution efficiency // 2. ROM efficiency // 3. RAM efficiency // Validation result: Not run // #include "arduinoTestVector.h" // Constant parameters (auto storage) const ConstParam_arduinoTestVector arduinoTestVector_ConstP = { // Expression: myData // Referenced by: '<S1>/Constant1' { 0, 1, 3, 4, 5, 6, 8, 9, 10, 11, 13, 14, 15, 17, 18, 19, 20, 22, 23, 24, 26, 27, 28, 29, 31, 32, 33, 34, 36, 37, 38, 40, 41, 42, 43, 45, 46, 47, 48, 50, 51, 52, 54, 55, 56, 57, 59, 60, 61, 62, 0, -1, -3, -4, -5, -6, -8, -9, -10, -11, -13, -14, -15, -17, -18, -19, -20, -22, -23, -24, -26, -27, -28, -29, -31, -32, -33, -34, -36, -37, -38, -40, -41, -42, -43, -45, -46, -47, -48, -50, -51, -52, -54, -55, -56, -57, -59, -60, -61, -62, 0, 3, 5, 8, 10, 13, 15, 18, 20, 23, 26, 28, 31, 33, 36, 38, 41, 43, 46, 48, 51, 54, 56, 59, 61, 64, 66, 69, 71, 74, 77, 79, 82, 84, 87, 89, 92, 94, 97, 99, 102, 105, 107, 110, 112, 115, 117, 120, 122, 125, 0, -3, -5, -8, -10, -13, -15, -18, -20, -23, -26, -28, -31, -33, -36, -38, -41, -43, -46, -48, -51, -54, -56, -59, -61, -64, -66, -69, -71, -74, -77, -79, -82, -84, -87, -89, -92, -94, -97, -99, -102, -105, -107, -110, -112, -115, -117, -120, -122, -125, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, 170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, -170, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, -255, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, 85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, -85, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 } }; // Block signals (auto storage) BlockIO_arduinoTestVector arduinoTestVector_B; // Block states (auto storage) D_Work_arduinoTestVector arduinoTestVector_DWork; // Model step function void arduinoTestVector_step(void) { // local block i/o variables uint8_T rtb_MOTORSHIELD_IN1; uint8_T rtb_MOTORSHIELD_IN2; uint8_T rtb_Abs; boolean_T aVarTruthTableCondition_1; boolean_T aVarTruthTableCondition_2; boolean_T aVarTruthTableCondition_3; uint16_T rtb_Init; // Outputs for Enabled SubSystem: '<Root>/ENABLE_TEST' incorporates: // EnablePort: '<S1>/Enable' // S-Function (sfunar_digitalInput): '<Root>/RUN_TEST' if (((uint8_T)digitalRead(((uint8_T)2U))) > 0) { if (!arduinoTestVector_DWork.ENABLE_TEST_MODE) { // InitializeConditions for UnitDelay: '<S1>/Unit Delay' arduinoTestVector_DWork.UnitDelay_DSTATE = false; // InitializeConditions for UnitDelay: '<S4>/FixPt Unit Delay2' arduinoTestVector_DWork.FixPtUnitDelay2_DSTATE = 1U; // InitializeConditions for UnitDelay: '<S4>/FixPt Unit Delay1' arduinoTestVector_DWork.FixPtUnitDelay1_DSTATE = 0U; arduinoTestVector_DWork.ENABLE_TEST_MODE = true; } // Switch: '<S4>/Init' incorporates: // Constant: '<S4>/Initial Condition' // Logic: '<S4>/FixPt Logical Operator' // UnitDelay: '<S1>/Unit Delay' // UnitDelay: '<S4>/FixPt Unit Delay1' // UnitDelay: '<S4>/FixPt Unit Delay2' if (arduinoTestVector_DWork.UnitDelay_DSTATE || (arduinoTestVector_DWork.FixPtUnitDelay2_DSTATE != 0)) { rtb_Init = 0U; } else { rtb_Init = arduinoTestVector_DWork.FixPtUnitDelay1_DSTATE; } // End of Switch: '<S4>/Init' // Selector: '<S1>/Selector' incorporates: // Constant: '<S1>/Constant1' arduinoTestVector_B.Selector = arduinoTestVector_ConstP.Constant1_Value [(int16_T)rtb_Init]; // Switch: '<S4>/Reset' incorporates: // UnitDelay: '<S1>/Unit Delay' if (arduinoTestVector_DWork.UnitDelay_DSTATE) { // Update for UnitDelay: '<S4>/FixPt Unit Delay1' incorporates: // Constant: '<S4>/Initial Condition' arduinoTestVector_DWork.FixPtUnitDelay1_DSTATE = 0U; } else { // Update for UnitDelay: '<S4>/FixPt Unit Delay1' incorporates: // Constant: '<S1>/Constant' // Sum: '<S1>/Add' arduinoTestVector_DWork.FixPtUnitDelay1_DSTATE = rtb_Init + 1U; } // End of Switch: '<S4>/Reset' // Update for UnitDelay: '<S1>/Unit Delay' incorporates: // Constant: '<S3>/Constant' // RelationalOperator: '<S3>/Compare' arduinoTestVector_DWork.UnitDelay_DSTATE = (rtb_Init == 500U); // Update for UnitDelay: '<S4>/FixPt Unit Delay2' incorporates: // Constant: '<S4>/FixPt Constant' arduinoTestVector_DWork.FixPtUnitDelay2_DSTATE = 0U; } else { if (arduinoTestVector_DWork.ENABLE_TEST_MODE) { // Disable for Outport: '<S1>/TEST_OUT' arduinoTestVector_B.Selector = 0; arduinoTestVector_DWork.ENABLE_TEST_MODE = false; } } // End of S-Function (sfunar_digitalInput): '<Root>/RUN_TEST' // End of Outputs for SubSystem: '<Root>/ENABLE_TEST' // Truth Table: '<Root>/Truth Table' // Truth Table Function 'Truth Table': '<S2>:1' // ClockWise // Condition '#1': '<S2>:1:10' aVarTruthTableCondition_1 = (arduinoTestVector_B.Selector > 0); // CounterClockWise // Condition '#2': '<S2>:1:14' aVarTruthTableCondition_2 = (arduinoTestVector_B.Selector < 0); // Stop // Condition '#3': '<S2>:1:18' aVarTruthTableCondition_3 = (arduinoTestVector_B.Selector == 0); if ((!aVarTruthTableCondition_1) && (!aVarTruthTableCondition_2) && aVarTruthTableCondition_3) { // Decision 'D1': '<S2>:1:20' // Stop // Action '3': '<S2>:1:48' rtb_MOTORSHIELD_IN1 = 0U; // Action '3': '<S2>:1:49' rtb_MOTORSHIELD_IN2 = 0U; } else { // Decision 'D2': '<S2>:1:20' if (aVarTruthTableCondition_1 && (!aVarTruthTableCondition_2) && (!aVarTruthTableCondition_3)) { // Decision 'D2': '<S2>:1:22' // ClockWise // Action '1': '<S2>:1:34' rtb_MOTORSHIELD_IN1 = 1U; // Action '1': '<S2>:1:35' rtb_MOTORSHIELD_IN2 = 0U; } else { // Decision 'D3': '<S2>:1:22' if ((!aVarTruthTableCondition_1) && aVarTruthTableCondition_2 && (!aVarTruthTableCondition_3)) { // Decision 'D3': '<S2>:1:24' // CounterClockWise // Action '2': '<S2>:1:41' rtb_MOTORSHIELD_IN1 = 0U; // Action '2': '<S2>:1:42' rtb_MOTORSHIELD_IN2 = 1U; } else { // Decision 'D4': '<S2>:1:24' // Decision 'D4': '<S2>:1:26' // Default // None // Action '4': '<S2>:1:55' rtb_MOTORSHIELD_IN1 = 0U; // Action '4': '<S2>:1:56' rtb_MOTORSHIELD_IN2 = 0U; } } } // End of Truth Table: '<Root>/Truth Table' // S-Function (sfunar_digitalOutput): '<Root>/MOTORSHIELD_IN1' digitalWrite(((uint8_T)8U), rtb_MOTORSHIELD_IN1); // S-Function (sfunar_digitalOutput): '<Root>/MOTORSHIELD_IN2' digitalWrite(((uint8_T)11U), rtb_MOTORSHIELD_IN2); // Abs: '<Root>/Abs' if (arduinoTestVector_B.Selector < 0) { rtb_Abs = (uint8_T)-arduinoTestVector_B.Selector; } else { rtb_Abs = (uint8_T)arduinoTestVector_B.Selector; } // End of Abs: '<Root>/Abs' // S-Function (sfunar_analogOutput): '<Root>/SPEEDPIN_A' analogWrite(((uint8_T)9U), rtb_Abs); } // Model initialize function void arduinoTestVector_initialize(void) { // Registration code // block I/O (void) memset(((void *) &arduinoTestVector_B), 0, sizeof(BlockIO_arduinoTestVector)); // states (dwork) (void) memset((void *)&arduinoTestVector_DWork, 0, sizeof(D_Work_arduinoTestVector)); // S-Function (sfunar_digitalInput): <Root>/RUN_TEST pinMode(((uint8_T)2U), INPUT); // InitializeConditions for Enabled SubSystem: '<Root>/ENABLE_TEST' // InitializeConditions for UnitDelay: '<S1>/Unit Delay' arduinoTestVector_DWork.UnitDelay_DSTATE = false; // InitializeConditions for UnitDelay: '<S4>/FixPt Unit Delay2' arduinoTestVector_DWork.FixPtUnitDelay2_DSTATE = 1U; // InitializeConditions for UnitDelay: '<S4>/FixPt Unit Delay1' arduinoTestVector_DWork.FixPtUnitDelay1_DSTATE = 0U; // End of InitializeConditions for SubSystem: '<Root>/ENABLE_TEST' // S-Function (sfunar_digitalOutput): <Root>/MOTORSHIELD_IN1 pinMode(((uint8_T)8U), OUTPUT); // S-Function (sfunar_digitalOutput): <Root>/MOTORSHIELD_IN2 pinMode(((uint8_T)11U), OUTPUT); // S-Function (sfunar_analogOutput): <Root>/SPEEDPIN_A pinMode(((uint8_T)9U), OUTPUT); } // // File trailer for generated code. // // [EOF] // Весь проект можно скачать здесь.
Модель, которую я буду использовать для проверки результатов:
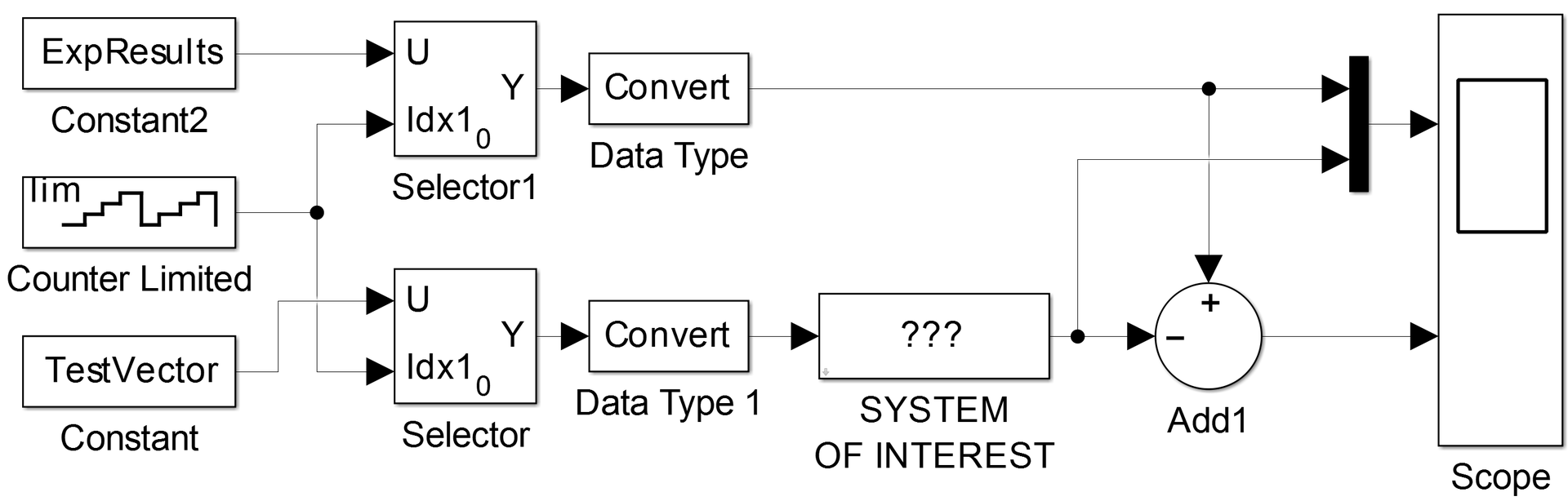
Все модели можно скачать здесь.
«Открыл и заустил» может не сработать, есть нюансы. С вопросами в личку, или в комментарии.
Видео
Результаты
Вот, что получилось в итоге:
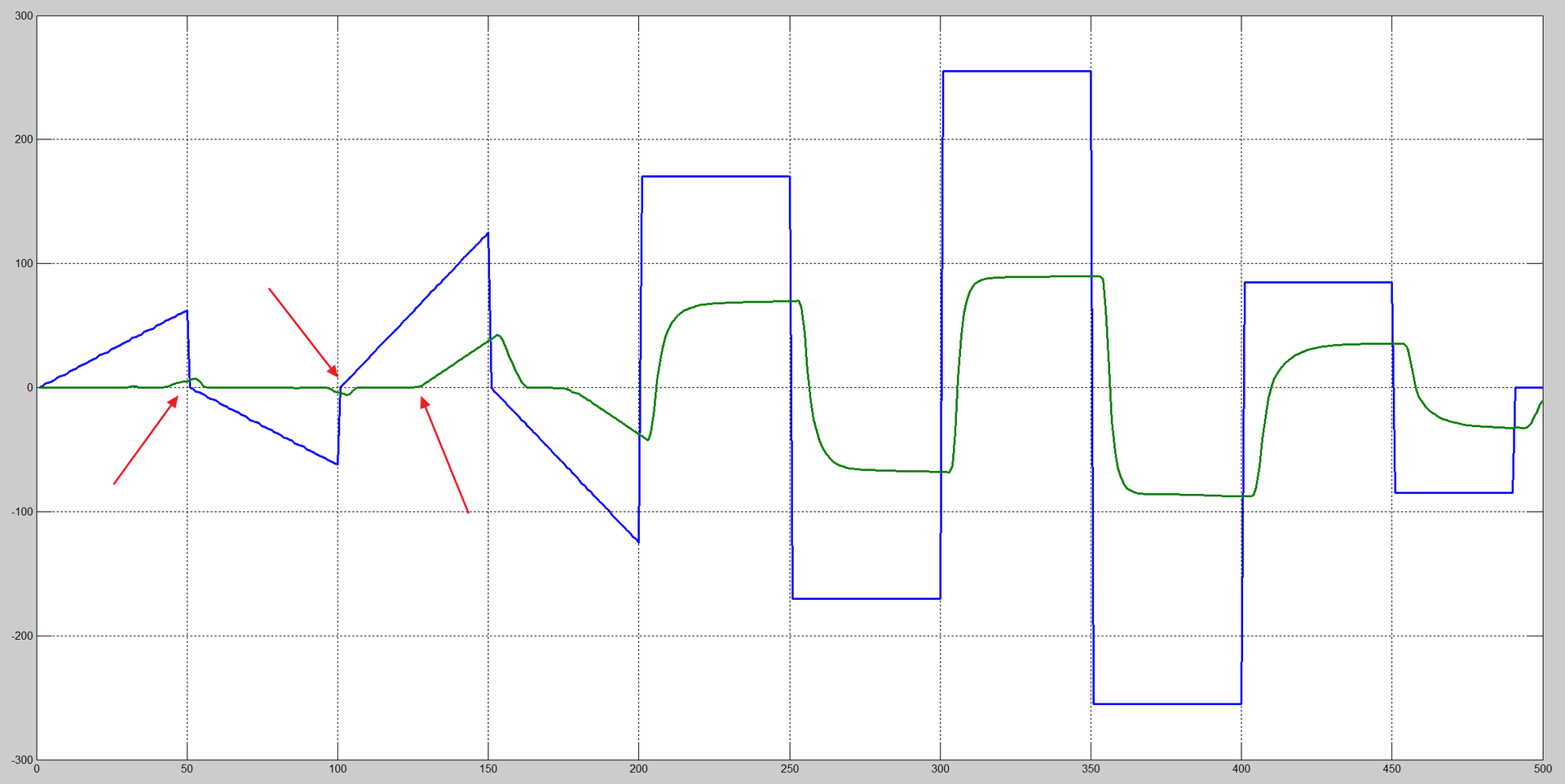
Синий — это входной сигнал с пределами от -255 до +255. В пересчете на вольты будет примерно от -8,5 до 8,5.
Зеленый — скорость вращения вала двигателя.
Видим временную задержку, отсутствие вращения, либо крайне малое вращение при подаче ШИМ менее 25%. Также наблюдаем классический апериодический переходной процесс.
А вот информация, которая выводится во время проведения эксперимента на дисплей, подключенный к машине реального времени:

Идентификация
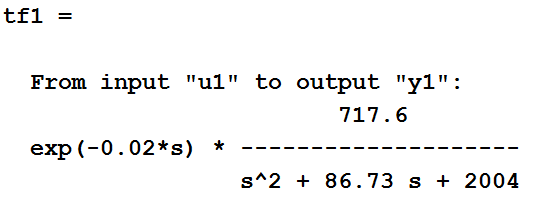
Одна из подсистем, а именно двигатель, может быть описан следующей передаточной функцией:
Так нам говорит курс ТАУ, с неё мы и начнем.
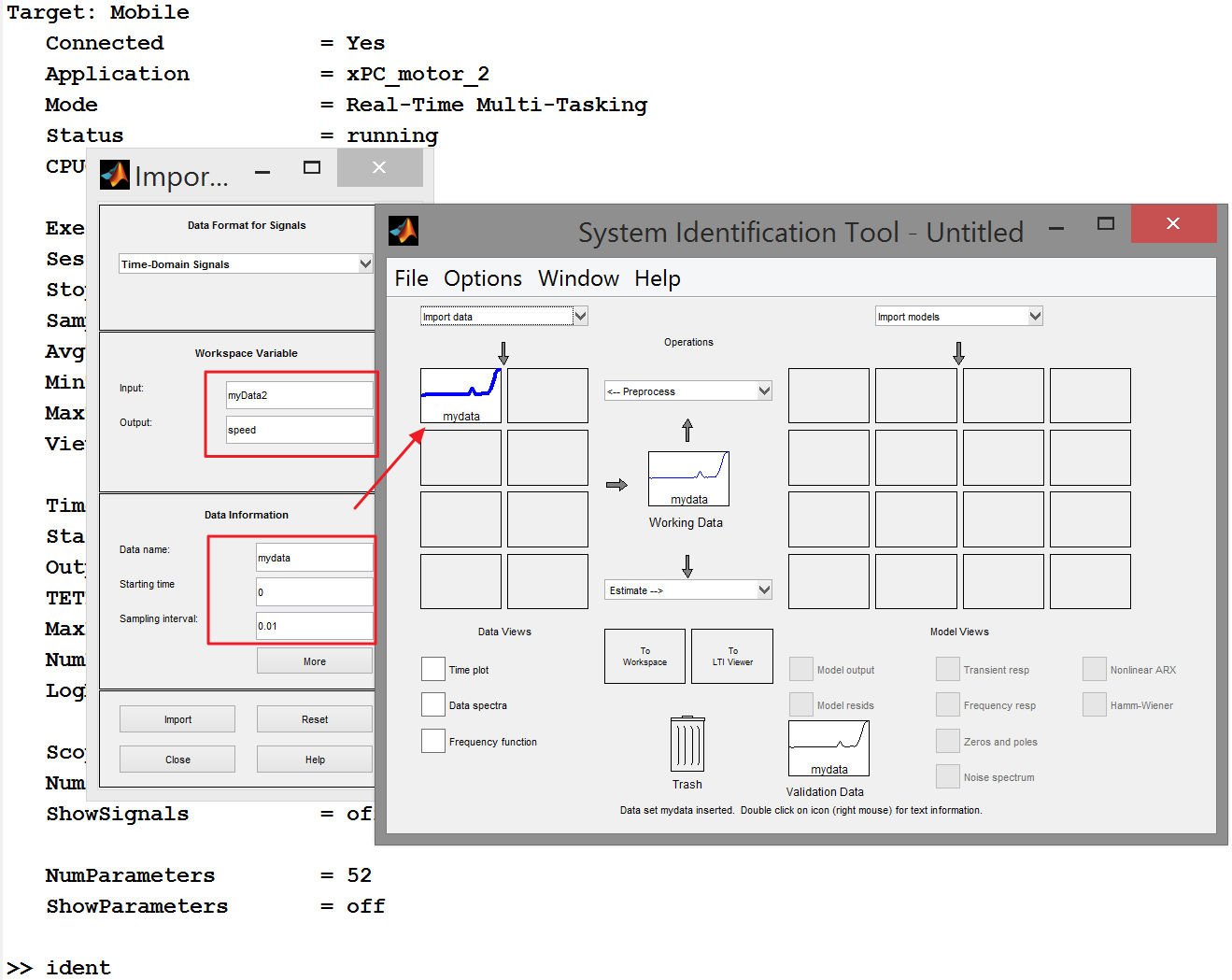
В составе MATLAB есть прерасный инструмент для идентификации систем — System Identification Toolbox. Он доступен как в виде графического интерфейса, так и в виде набора функций, которые можно использовать в скриптах MATLAB. Рассмотрим сперва работу в графическом интерфейсе.
Импортируем данные, полученные в ходе эксперимента и тестовое воздействие:
После импорта нам становятся доступны инструменты предварительной обработки данных. Мы имеем возможность, например, разделить массивы данных на две части — для идентификации и отдельно для верификации. Но это для более сложных случаев, давайте же скорее перейдем к делу!
Выбираем из выпадающего списка «Estimate» пункт Transfer Function Models.
Получаем передаточную функцию:
Давайте сравним поведение полученной функции и системы:
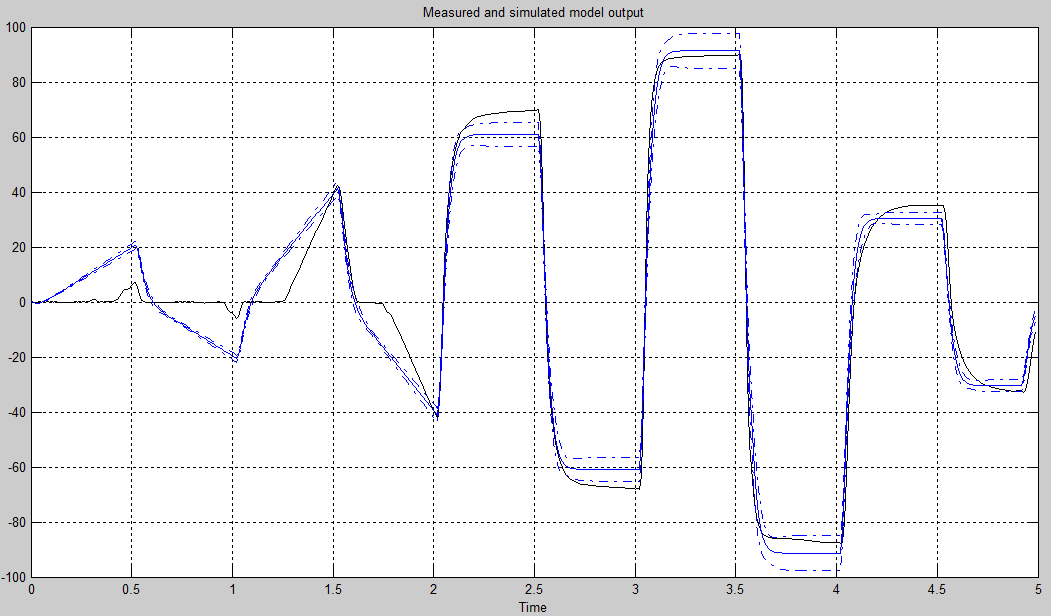
Синим отображен отклик передаточной функции на исходный тестовый вектор. Видно, что данную функцию можно использовать как модель исходной системы только в режиме старт-стоп. И не удивительно — нелинейное поведение, которое присутствует в системе, не может быть описано таким способом.
Продвигаемся дальше, используем шаблон модели Хаммерштейна-Винера, которая дает возможность описывать нелинейное поведение системы:

В качестве входной нелинейности выберем Dead Zone — отсутствие реакции системы на входной сигнал менее определенного порогового значения. Такой тип нелинейности должен взять на себя описание трения спокойствия и влияния постоянных магнитов, которое имеет место в системе.
Остальные параметры по умолчанию, жмем Estimate.
Сравниваем полученный результат с экспериментальными данными:

Выглядит гораздо лучше! Не идеально — заметно некоторое аномальное поведение, но мы ведь только слегка коснулись идентификации нелинейных систем.
Теперь нам остается только экспортировать данную модель в Simulink, где мы можем приступить к разработке системы управления. Но об этом в следующем топике!
Благодарю за внимание, надеюсь было интересно?
И еще раз благодарю за ответы на небольшой опрос:
ссылка на оригинал статьи http://habrahabr.ru/post/222779/
Добавить комментарий