Формирование антропоморфной робототехники напрямую коррелирует с началом развития активных экзоскелетов: так, первый шагающий экзоскелет был создан в 1969 г. под руководством югославского исследователя и ученого, специалиста в области биомеханики и робототехники, Миомира Вукобратовича в институте им. Михаила Пупина в Белграде.
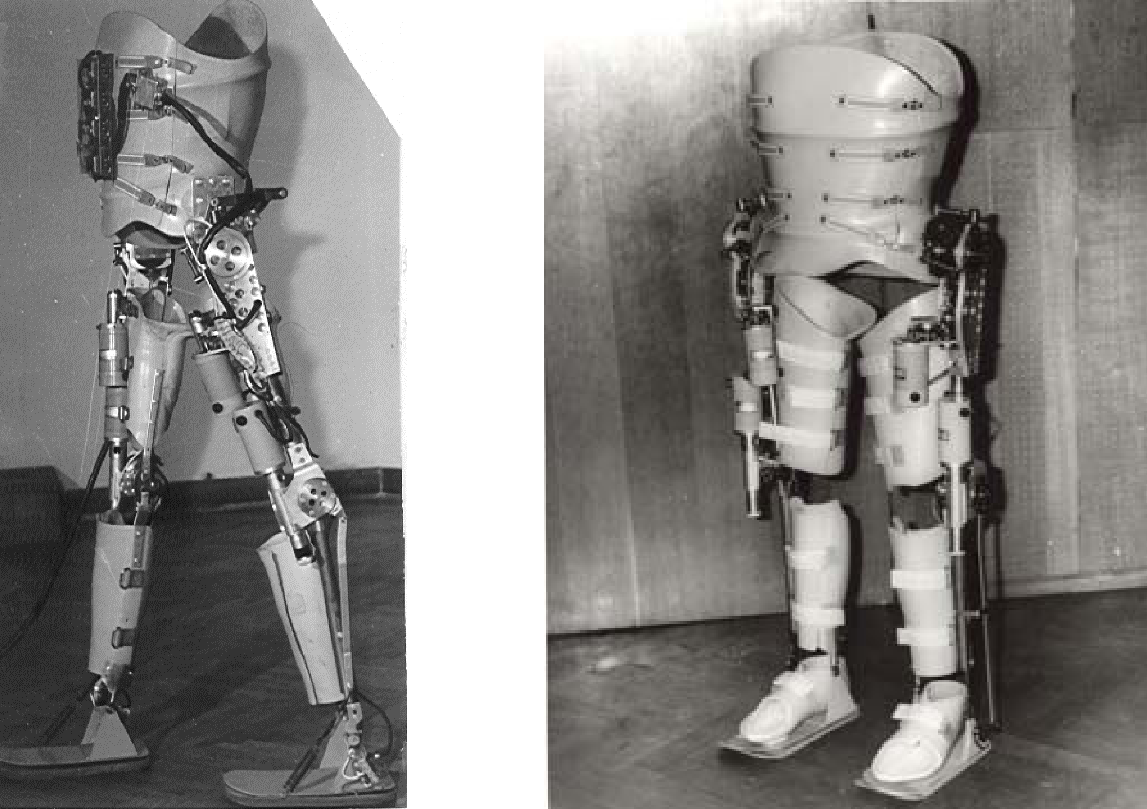
Дальнейшая доработка и детальные исследования экзоскелета велись Миомиром Вукобратовичем совместно с советскими коллегами в НИИ механики МГУ имени М.В. Ломоносова и в Центральном Государственном Институте Ортопедии и Травматологии (ЦИТО). Аппаратно-программируемый, построенный и протестированный в 1974 г. активный экзоскелет с электромеханическими двигателями изображен на фотографии ниже. На момент своего создания он предназначался для оценки и развития электромеханических двигателей ортопедических устройств и стал первым в мире образцом активного экзоскелета с электрическими двигателями в качестве силовых приводов. Этот экзоскелет можно считать полноправным предшественником современных антропоморфных роботов, приводящихся в движение с помощью электромоторов.
Используя понятие точки нулевого момента (ТНМ или Zero moment point (ZMP) на английском языке), ученые исследовательской лаборатории Икира Като в 1984 г. разработали 3D-модель двуногого шагающего робота (ДШР) и проверили свойства его силовых приводов. Профессор Като и его коллеги-ученые стали первыми, кто в 1986 г. реализовал динамическую походку ДШР с уравновешиванием туловища в роботе WL-12.

Подразумевалось, что ДШР должен самостоятельно адаптировать собственную походку к неровной поверхности и уклоняться от препятствий. Вышеупомянутой группе ученых в итоге удалось представить конструкцию корпуса робота, способного стабилизировать походку — робота WL-12, был способен делать 30-сантиметровые шаги за 2.6 секунды. При этом использовался алгоритм, генерирующий временную траекторию движения верхней части корпуса робота при предоставлении произвольно выбранной траектории движения нижних конечностей и ТНМ. Существенными недостатками WL-12 являлись неэстетичная конструкция и слабая внешняя схожесть с человекоподобными роботами в современном понимании.
На основании того же метода «Точки нулевого момента», ученые из Исследовательского центра Вако, Honda R&D Co. Ltd. (Wako Research Center), в 1986 представили антропоморфного робота HONDA, который прошел долгий путь от роботов линейки Е, от модели Е0 до модели Е6 в 1986-1993, и линейки P, от модели P1 до модели P4 в 1993-2000, и, наконец, до современной линейки ASIMO.

Антропоморфный робот Хонда. Слева направо: модели Е0, Е6, P1, P4, ASIMO 2014
В последнее время мы наблюдаем повышенный интерес к экзоскелетам, послужившим первоначальным толчком к успешным исследованиям в области статического и динамического равновесия ДШР.
В этой связи хочется отметить российский проект ExoAtlet, команда которого с 2013 года занимается разработкой медицинской версии экзоскелета для инвалидов с нарушениями локомоторных функций нижних конечностей. Алгоритмы управления позволяют осуществлять в автоматическом режиме передвижение пациента с повторением максимально естественного процесса ходьбы человека, что позволяет существенно ускорить процесс восстановления двигательной и нервной активности. На сегодняшний день компанией ExoAtlet уже представлена вторая версия действующего прототипа экзоскелета для реабилитации.

Лидером отечественной антропоморфной робототехники – и на сегодняшний день монополистом на российском рынке робототехники – является НПО “Андроидная техника”. Они зарекомендовали себя как успешная и конкурентоспособная на мировом рынке компания, которая ведет активную научно-исследовательскую и опытно-конструкторскую деятельность, а также занимается воплощением своих инновационных решений и производит постоянно совершенствующуюся линейку антропоморфных роботов AR-600.

Слева направо: модели AR-600, AR-600E, SAR-400, SAR-401
В начале 2000-х компания Новая Эра из Санкт-Петербурга сделала попытку создать первого российского антропоморфного ДШР ARNEO, которая, к сожалению, не увенчалась успехом. Одним из интересных решений, предложенных Новой Эрой, являлось использование вентильных бесконтактных электромоторов постоянного тока мощностью 60 Вт, которые изготавливались непосредственно самой компанией и имели высокие удельные характеристики, позволяющие развивать довольно большую мощность, учитывая нагрузку на ноги ДШР.

Данный обзор был подготовлен по материалам прикладного научного исследования ДШР, проводимого Лабораторией Интеллектуальных Робототехнических Систем (ЛИРС) Университета Иннополис. Разработка и исследование систем управления механикой движения антропоморфных робототехнических комплексов на основе контроля статического и динамического равновесия входит в число текущих проектов лаборатории. Руководитель лаборатории: профессор Евгений Магид, автор более 40 научных работ*. Подробный обзор по современным антропоморфным роботам будет представлен в следующем материале.
При лаборатории открыт набор студентов в магистратуру на направление «Робототехника» — [подробности и условия поступления]
* Работы профессора Магида опубликованы на английском, русском и японском языках, проиндексированы в международных рейтингах с присвоением индекса Хирша 6 и процитированы более 300 раз в работах других зарубежных ученых по версии Google Scholar.
ссылка на оригинал статьи http://geektimes.ru/post/248270/
Добавить комментарий