Долгое время игрался с Arduino-подобными платами, но всё время хотелось «меньше, дешевле и ближе к железу!», и вот — первый опыт программирования чистого ATtiny. В статье не будет какой-то особо эффективной схемы металлоискателя. Это всего лишь демонстрация того, на что способен микроконтроллер за 47 центов + путь чайника в этом, как выяснилось, совсем не сложном деле перехода от Arduino на уровень ниже.
Выбор железа
После недолгого анализа, выбор пал на ATtiny24A-SSU (14-pin SOIC корпус). Почему? Причина проста: цена + ядро AVR. Да, я знаю, что даже более мощный STM8S103F3P6 стоит дешевле (39,5 центов за штуку против 47 за ATtiny), но имея какой-то опыт работы с AVR в Arduino хотелось для первых экспериментов именно AVR.
Из доступных AVR выбираем ATtiny как самые дешёвые, а дальше хочется DIP корпус как более простой для пайки. Но микросхемы в DIP корпусе оказались гораздо дороже (54 цента за 8-ногий ATtiny13A, а 14-ногий ATtiny23A в DIP корпусе так вообще 95 центов). Идея использовать ATtiny13A мне не нравится из-за его восьминогости. 6 ног будут заняты программатором и остаются всего 2 свободные, что мало.
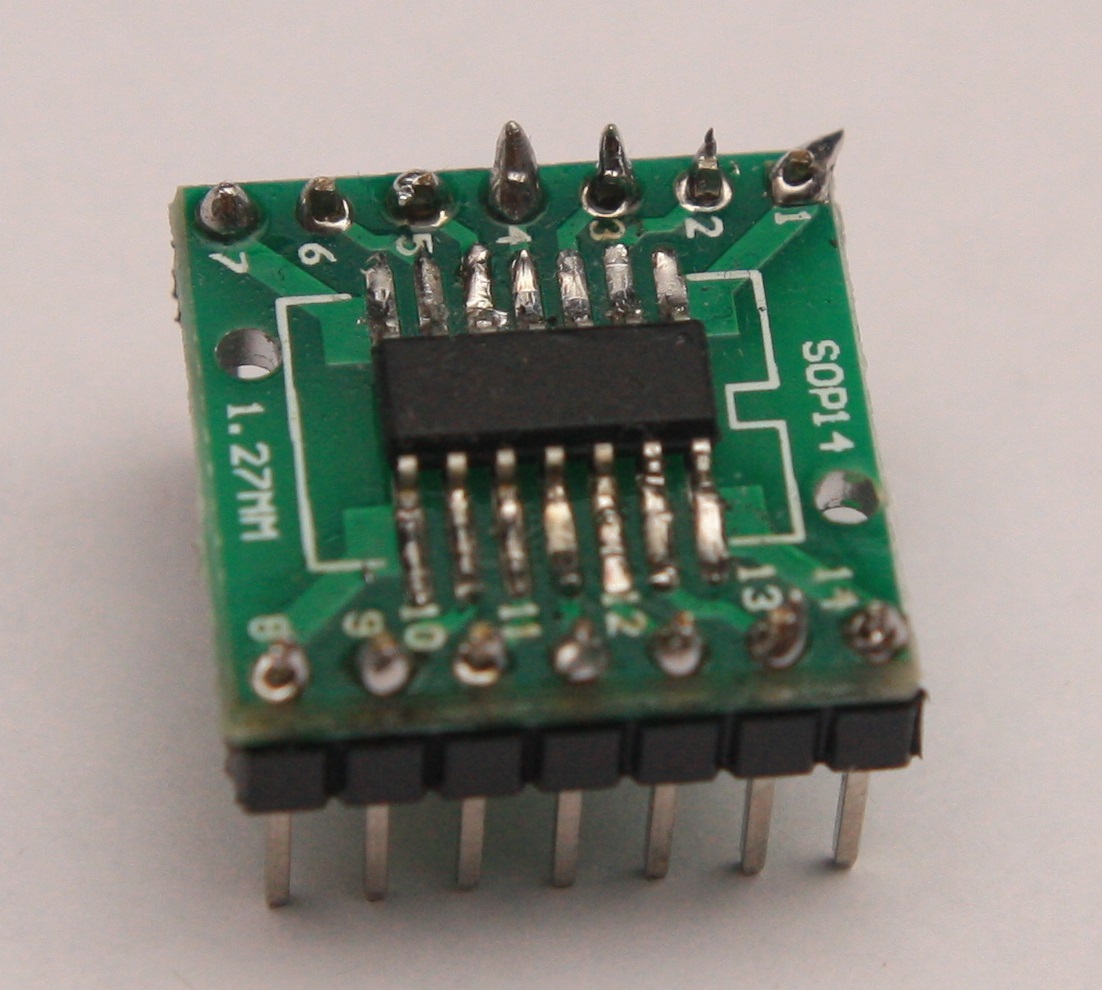
Было принято решение купить ATtiny24A-SSU по 47 центов и ещё переходники по 30 центов. Итого получаем 77 центов на устройство против 95 за DIP корпус и, как бонус, в простых устройствах использовать переходник в качестве платы с подпаиванием проводков прямо к нему, что было бы невозможно с DIP корпусом.
Программатор выбран по тому же принципу (самый дешёвый): USBasp за 1,86$.
Приехало!
Сразу скажу, что никогда не паял раньше SOIC корпуса, поэтому был некий страх, что не получится… Оно оказалось не сложно, не просто… в общем пришлось приложить некие усилия, но в итоге получилось! Показалось целесообразным прогревать не по одному выводу, а сразу группами — так и быстрее и проще.
Чем программировать?
ATtiny24A по умолчанию тактируется от внутреннего генератора и работает на частоте 1 МГц. Ну и пусть работает, меня это вполне устраивает. А вот чтобы USBasp стал с ним работать на такой частоте, ему пришлось припаять дополнительную перемычку (проводок на фото):
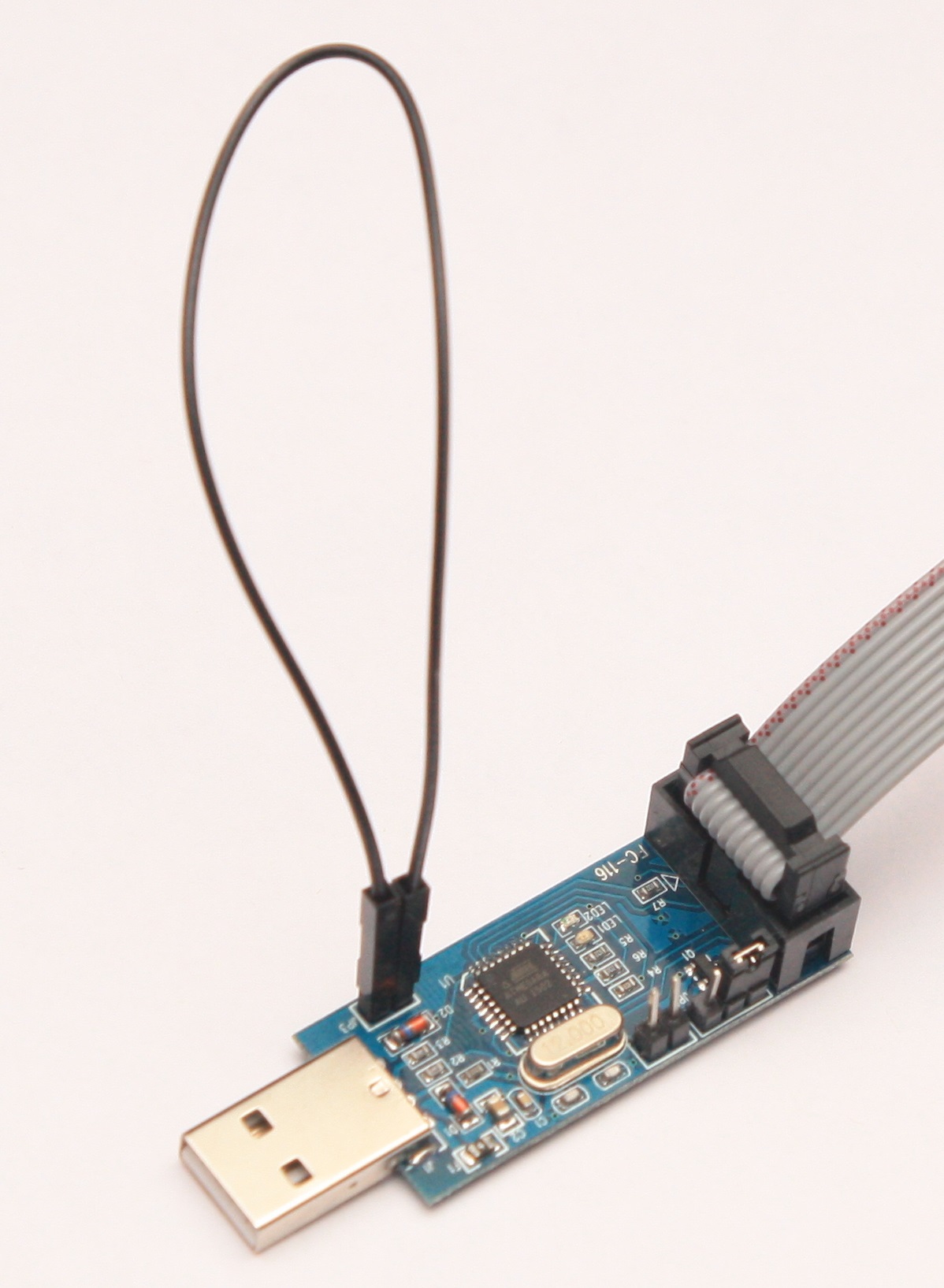
Место на плате было, а вот джампер китайцы припаять не удосужились… пришлось сделать за них.
В плане среды разработки выбор пал на Atmel Studio, однако она не поддерживает наш USBasp… но это же не беда! Ещё при выборе программатора планировалось перепрошить его в AVR-Doper, который совместим с STK500, а значит поддерживается нашей Atmel Studio. В общем, прошивал я его много раз разными прошивками, но Atmel Studio никак не хотела его видеть… печаль… в итоге отчаялся, прошил обратно в USBasp и сделал по инструкии. После чего удалось прошить свою ATtiny, помигать светодиодом и обрадоваться тому как мало flash памяти по сравнению с Arduino это заняло.
Металлоискатель
Ещё когда баловался с Arduino, делал металлоискатель работающий на принципе срыва резонанса. Чувствительность ужасная, однако принцип работы очень прост и легко реализуется на любом МК. На паралельный колебательный контур через резистор подаётся прямоугольный сигнал на резонансной частоте этого контура. Когда в магнитное поле катушки попадает металлический предмет, добротность контура падает, амплитуда сигнала, измеряемая АЦП, падает, устройство радует нас визуально и акустически.
У металлоискателя 2 режима:
1. Поиск резонанса контура. При этом он посылает на контур прямоугольные сигналы разной частоты и запоминает частоту, при которой амплитуда колебаний будет наибольшей (эту наибольшую амплитуду тоже запоминаем).
2. Рабочий режим. На контур посылаем сигнал с резонансной частотой и сравниваем амплитуду с тем максимумом, который был в первом режиме.
Сложно? — Нет!
Много памяти должно занимать? — Нет!
А много памяти у нас есть (2 KB flash + 128 байт оперативки)? — Тоже нет!
Влезет? Попробуем — узнаем!
В итоге, влезло.
#include <avr/io.h> #include <avr/interrupt.h> #include "mySerial.cpp" MySerial ms(&PORTB, &PINB, &DDRB, 0, &PORTB, &PINB, &DDRB, 1); volatile uint16_t maxAdc = 0; // максимальное показание АЦП (в резонансе на максимальной добротности) volatile uint8_t dispMode = 0; // 0 - поиск резонанса, 1 - рабочий режим volatile uint8_t flags0 = 0; // [0] - need setRes volatile uint16_t adcSource = 0; //volatile bool needADC = false; #define ADC_SOURCE_ARRAY_SIZE_POWER 5 #define ADC_SOURCE_ARRAY_SIZE (1 << ADC_SOURCE_ARRAY_SIZE_POWER) uint16_t adcSourceArray[ADC_SOURCE_ARRAY_SIZE]; uint8_t adcSourceArrayLastWrited = 0; void showVal(void); ISR(ADC_vect){ //adcSourceArrayLastWrited++; if(++adcSourceArrayLastWrited >= ADC_SOURCE_ARRAY_SIZE) adcSourceArrayLastWrited = 0; adcSourceArray[adcSourceArrayLastWrited] = ADCL | (ADCH << 8); uint16_t adcSourceTmp = 0; for(uint8_t i = 0; i < ADC_SOURCE_ARRAY_SIZE; i++) adcSourceTmp += adcSourceArray[adcSourceArrayLastWrited]; adcSource = (adcSourceTmp >> ADC_SOURCE_ARRAY_SIZE_POWER); //adcSource = ADCL | (ADCH << 8); //needADC = false; } volatile uint8_t pinaChanged = 0; volatile uint8_t tim0_ovf_counter = 0; //uint32_t ticks = 0; volatile uint16_t ticks10ms = 0; //volatile uint16_t ticks = 0; ISR(TIM0_OVF_vect) { //ticks++; //if(255 == tim0_ovf_counter++){ // ticks every 65.5 ms if(39 == (tim0_ovf_counter++)){ // ticks every 10 ms tim0_ovf_counter = 0; ticks10ms++; if(pinaChanged > 0) pinaChanged--; } } uint16_t dist16(uint16_t lo, uint16_t hi){ return (lo <= hi) ? (hi - lo) : (0xFFFF - lo + hi); } /*void delayTicks(uint16_t val){ uint16_t tim0_ovf_counter0 = tim0_ovf_counter; while(dist16(tim0_ovf_counter0, tim0_ovf_counter) < val) showVal(); }*/ void delay10ms(uint16_t val){ uint16_t ticks10ms0 = ticks10ms; while(dist16(ticks10ms0, ticks10ms) < val) showVal(); } void showVal(void){ ms.sendByte(adcSource >> 2); switch(dispMode){ case 0: OCR0A = adcSource >> 2; break; case 1: uint16_t maxAdcPlus = maxAdc + 2; uint16_t dispVal = (maxAdcPlus > adcSource) ? ((maxAdcPlus - adcSource)) : 0; dispVal <<= 4; if(dispVal > 255) dispVal = 255; OCR0A = dispVal; break; } } void setRes(void) { dispMode = 0; uint16_t maxOCR = 0; maxAdc = 0; for(uint16_t curOCR = 35; curOCR < 50; curOCR++){ OCR1A = curOCR; OCR1B = (curOCR >> 1); //uint32_t ticks0 = ticks; //uint16_t ticks0 = ticks; //while(dist16(ticks0, ticks) < 20) // showVal(); delay10ms(30); if(adcSource > maxAdc){ maxAdc = adcSource; maxOCR = curOCR; } } OCR1A = maxOCR; OCR1B = (maxOCR >> 1); dispMode = 1; } ISR(PCINT0_vect) { if(pinaChanged > 0) return; pinaChanged = 5; if(0 == (PINA & (1 << 7))) flags0 |= 1; } int main(void) { // init PWM: DDRB |= 4; // OC0A as output //TIMSK0 |= 7; // разрешаем TIM0_OVF_vect, TIM0_COMPA_vect, TIM0_COMPB_vect TIMSK0 |= 1; // разрешаем TIM0_OVF_vect TCCR0B |= 1; // no prescaling. OVF каждые 256 мкс (3.91 кГц) //TCCR0B |= 2; // clk/8 //TCCR0B |= 3; // clk/64 //TCCR0B |= 5; // clk/1024. OVF каждые 262 мс (3.815 Гц) TCCR0A |= (3 | (1 << 7)); //WGM0[2:0] = 3 - fawt PWM mode. bit7 - дёргать ногой //OCR0A = 150; //OCR0B = 100; // :init PWM // init ADC: //ADMUX |= (1 << 7); // internal 1.1V reference. Comment this to use VCC as reference //ADMUX |= (1 << 3) | 1; // MUX[5:0] = 001001. Res = ADC0 - ADC1. Gain = 20 ADMUX |= (1 << 3); // MUX[5:0] = 001000. Res = ADC0 - ADC1. Gain = 1 ADCSRA |= ((1 << 7) // enable ADC | (1 << 5) // ADC Auto Trigger Enable. Постоянно работает | (1 << 6) // запускаем 1е преобразование | (1 << 3) // ADC interrupt enable | (1 << 2)); // prescaller = 16 (надо 50-200 kHz) // :init ADC // init 16-bit timer: // pin7 = MOSI = PA6 = OC1A //DDRA |= (1 << 6); // OC1A as output DDRA |= (1 << 5); // OC1B as output //TCCR1A |= (1 << 6); // Toggle OC1A/OC1B on Compare Match TCCR1A |= (1 << 5) // Clear OC1B on Compare Match, set OC1B at BOTTOM (non-inverting mode) | (3); // set WGM10 and WGM11 // WGM1[3:0] = 1111 - Fast PWM, TOP = OCR1A. // TCCR1A |= (1 << 6) | (1 << 7) // Set OC1A on Compare Match (Set output to high level). // | (1 << 5); // Clear OC1B on Compare Match (Set output to low level) TCCR1B |= 1 // no prescalling | (1 << 3) | (1 << 4); // set WGM12 and WGM13 //TIMSK1 |= (1 << 2) | (1 << 1) | 1; // enable all interrupts OCR1B = 21; OCR1A = 42; //for(;;){;}; // :init 16-bit timer // init button: PORTA |= (1 << 7); // включаем подтягивающий резистор на 6-й ноге. PA7 = PCINT7 GIMSK |= (1 << 4); // Pin Change Interrupt Enable 0 PCMSK0 |= (1 << 7); // включаем прерывание PCINT7 // :init button sei(); flags0 = 1; // это экономит 22 байта по сравнению с присвоением при объявлении! while(1){ showVal(); //ms.sendByte(0x99); if(0 != (1 & flags0)){ setRes(); flags0 &= ~1; } } }
#include <avr/io.h> #include <avr/interrupt.h> class MySerial{ public: volatile uint8_t *dataPort; volatile uint8_t *dataPin; volatile uint8_t *dataDDR; volatile uint8_t *clockPort; volatile uint8_t *clockPin; volatile uint8_t *clockDDR; uint8_t dataPinMask, clockPinMask; uint8_t rBit, lastState, // (dataPin << 1) | clockPin inData; // MySerial ms(&PORTD, &PIND, &DDRD, 2, &PORTD, &PIND, &DDRD, 3); MySerial( volatile uint8_t *_dataPort, volatile uint8_t *_dataPin, volatile uint8_t *_dataDDR, uint8_t _dataPinN, volatile uint8_t *_clockPort, volatile uint8_t *_clockPin, volatile uint8_t *_clockDDR, uint8_t _clockPinN ){ rBit = 255; lastState = 3; inData = 0; dataPort = _dataPort; dataPin = _dataPin; dataDDR = _dataDDR; dataPinMask = (1 << _dataPinN); clockPort = _clockPort; clockPin = _clockPin; clockDDR = _clockDDR; clockPinMask = (1 << _clockPinN); } void dataZero() { *dataPort &= ~dataPinMask; //digitalWrite(pinData, 0); *dataDDR |= dataPinMask; //pinMode(pinData, OUTPUT); } void dataRelease() { *dataDDR &= ~dataPinMask; //pinMode(pinData, INPUT); *dataPort |= dataPinMask; //digitalWrite(pinData, 1); } void clockZero() { *clockPort &= ~clockPinMask; //digitalWrite(pinClock, 0); *clockDDR |= clockPinMask; //pinMode(pinClock, OUTPUT); } void clockRelease() { *clockDDR &= ~clockPinMask; //pinMode(pinClock, INPUT); *clockPort |= clockPinMask; //digitalWrite(pinClock, 1); } void pause() { //delay(v * 1); //unsigned long time = micros(); //while(v-- > 0) for(uint16_t i = 0; i < 250; i++) __asm__ __volatile__( "nop" ); //time = micros() - time; //LOG("Paused "); LOG(time); LOGLN("us"); } void sendByte(uint8_t data){ //LOG("Sending byte: "); LOGLN(data); // отрицательный фронт data при clock = 1: dataRelease(); clockRelease(); pause(); dataZero(); pause(); //LOGLN("Going to loop..."); for(uint8_t i = 0; i < 8; i++){ clockZero(); pause(); if( 0 == (data & (1 << 7)) ) dataZero(); else dataRelease(); //LOG("Sending bit "); LOGLN((data & (1 << 7))); pause(); clockRelease(); pause(); data = data << 1; } // положительный фронт data при clock = 1: dataZero(); pause(); dataRelease(); pause(); } void tick(){ //uint8_t curState = (digitalRead(pinData) << 1) | digitalRead(pinClock); dataRelease(); clockRelease(); uint8_t curState = 0; if(0 != (*dataPin & dataPinMask)) curState |= 2; if(0 != (*clockPin & clockPinMask)) curState |= 1; //LOGLN(curState); if((3 == lastState) && (1 == curState)) // началась передача rBit = 7; if(255 != rBit) if( (0 == (lastState & 1)) && (1 == (curState & 1)) ) { // пришёл положительный фронт clock //LOG("Getted bit "); LOGLN((curState >> 1)); if( 0 == (curState >> 1) ) inData &= ~(1 << rBit); else inData |= (1 << rBit); rBit--; } if( (1 == lastState) && (3 == curState) ){ // закончилась передача //LOG("Recieved byte: "); LOGLN(inData); rBit = 255; //delay(5000); } lastState = curState; } };
И мало того, что влезло, так оно и занимает всего 1044 байта во flash из доступных 2048! И это при том, что помимо основной функции, он ещё отправляет отладочную информацию (MySerial)!

Немного поясню что здесь зачем (слева направо):
- Моток провода — это чувствительная катушка металлоискателя;
- Кнопка слева на макетке — вызов функции определения резонанса;
- Диод + резистор + конденсатор — это амплитудный детектор;
- Зелёная платка — адаптер с ATtiny24A на нём;
- Светодиод с резистором и большая чёрная коробка (это древний микроамперметр) — индикация ШИМ;
- Arduino Nano подключённая двумя проводками — приёмник для отладочной информации.
На записи видно как при помещении в катушку металлического предмета падают показания АЦП(на экране) и МК повышает ток через индикатор.
Что дальше?
Задача «поиграться с ATtiny» выполнена. Всё работает, всё хорошо. Граблей на пути оказалось даже меньше, чем ожидал. Но из-за указанного в начале факта (что даже более мощный STM8S103F3P6 стоит дешевле) причин делать что-то на AVR вижу только две: простота и хорошая документация. Ну, может быть, ещё в два раза больший максимально допустимый ток выхода в каких-то случаях может стать аргументом.
ссылка на оригинал статьи http://geektimes.ru/post/262004/
Добавить комментарий