Введение
Данная статья кратко описывает распараллеливание расчетов на вычислительных мощностях CPU и GPU. Перед тем как перейти к описанию самих алгоритмов, ознакомлю вас с поставленной задачей.
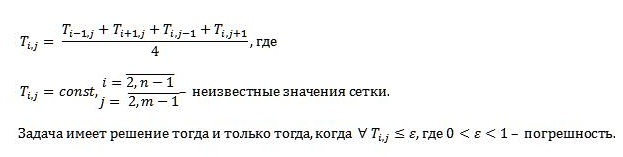
Необходимо смоделировать систему решения задач методом конечных разностей. С математической точки зрения это выглядит следующим образом. Дана некоторая конечная сетка:

Неизвестные значения сетки находятся по следующей формуле методом конечных разностей:
Распараллеливание на CPU
Для параллельных вычислений на CPU используются технологию Parallel, которая аналогична OpenMP. Parallel – внутренняя технология, используемая в языке C#, предоставляющая поддержку параллельных циклов и областей.
Параллельные вычисления на Parallel:
/* n*m размерность конечной сетки T начальные значения конечной сетки eps допустимая погрешность */ /* Так как процесс выполняется параллельно, то необходимо для хранения ошибок и новых значений узлов использовать двумерные массивы, так как выполняются вычисления без блокировок. Это тратит больше пространства памяти, но позволяет обойтись без блокировок.*/ private void Parallelization(int n, int m, float[,] T, float eps) { int time; //Секундомер bool flag = false; //Условие завершения int interetion = 0; //Количество итераций float epsilint; // Наибольшая погрешность в конечной сетке float[,] count_eps = new float[n,m]; // Погрешность узла float[,] T_new = new float[n, m]; // Новые значения неизвестных эл-тов сетки time = Environment.TickCount; // Записывает время начала итераций do { epsilint = eps; Parallel.For(1, n-1, i => { Parallel.For(1, m - 1, j => { //Находим новое значение неизвестной T_new[i, j] = (T[i - 1, j] + T[i + 1, j] + T[i, j - 1] + T[i, j + 1]) / 4; //Вычисляем значение разницу между старым и новым значением count_eps[i, j] = Math.Abs(T_new[i, j] - T[i, j]); //Проверяем погрешность полученного значения if (count_eps[i,j] > epsilint) { epsilint = count_eps[i,j]; } T[i, j] = T_new[i, j]; }); }); interetion++; }while(epsilint > eps || epsilint != eps); //повторяем пока погрешность не удовлетворяет условиям time = Environment.TickCount - time; //Записываем время окончания итераций Output(n, m, time, interetion, "OpenMP Parallezetion"); //Вывод }
Распараллеливание на GPU
Для параллельных вычислений на GPU используется технология CUDA. CUDA – это архитектура параллельных вычислений от NVIDIA, позволяющая существенно увеличить вычислительную производительность благодаря использованию GPU.
Параллельные вычисления на CUDA:
/*Упрощаем работу с CUDA, вылавливаем ошибки при выполнении команд*/ #define CUDA_DEBUG #ifdef CUDA_DEBUG #define CUDA_CHECK_ERROR(err) \ if (err != cudaSuccess) { \ printf("Cuda error: %s\n", cudaGetErrorString(err)); \ printf("Error in file: %s, line: %i\n", __FILE__, __LINE__); \ } \ #else #define CUDA_CHECK_ERROR(err) #endif /*Параллельные вычисления на GPU*/ __global__ void VectorAdd(float* inputMatrix, float* outputMatrix, int n, int m) { int i = threadIdx.x + blockIdx.x * blockDim.x; //Индексация по столбцам int j = threadIdx.y + blockIdx.y * blockDim.y; //Индексация по строкам if(i < n -1 && i > 0) { if( j < m - 1 && j > 0) //Находим новое значение неизвестной outputMatrix[i * n + j] = (inputMatrix[(i - 1) * n + j ] + inputMatrix[(i + 1) * n + j] + inputMatrix[i * n + (j - 1)] + inputMatrix[i * n + (j + 1)])/4; } } /* n*m размерность конечной сетки T начальные значения конечной сетки eps допустимая погрешность */ /* В GPU все двумерные массивы передаются в виде одномерной строки, тем самым заранее двумерный массив T был преобразован в одномерный*/ void OpenCL_Parallezetion(int n, int m, float *T, float eps) { int matrixsize = n * m; // Размер памяти для CPU int byteSize = matrixsize * sizeof(float); // Размер памяти под GPU time_t start, end; // Время начала и конца итераций float time; // Время просчетов float* T_new = new float[matrixsize]; // Новые значения неизвестных эл-тов сетки float *cuda_T_in; // Старые значения неизвестных эл-тов сетки на GPU float *cuda_T_out; // Новые значения неизвестных эл-тов сетки на GPU CUDA_CHECK_ERROR(cudaMalloc((void**)&cuda_T_in, byteSize)); // Выделение памяти массива на GPU CUDA_CHECK_ERROR(cudaMalloc((void**)&cuda_T_out, byteSize)); float epsilint; // Наибольшая погрешность в конечной сетке float count_eps; // Погрешность узла int interetaion = 0; //Количество итераций start = clock(); // Записывает время начала итераций dim3 gridsize = dim3(n,m,1); // Диапазон индексов (x,y,z) для GPU do{ epsilint = eps; CUDA_CHECK_ERROR(cudaMemcpy(cuda_T_in, T, byteSize, cudaMemcpyHostToDevice)); // Копируем в память GPU VectorAdd<<< gridsize, m >>>(cuda_T_in, cuda_T_out, n, m); CUDA_CHECK_ERROR(cudaMemcpy(T_new, cuda_T_out, byteSize, cudaMemcpyDeviceToHost)); // Извлекаем из памяти GPU for(int i = 1; i < n -1; i++) { for(int j = 1; j < m -1; j++) { //Вычисляем значение разницу между старым и новым значением count_eps = T_new[i* n + j ] - T[i* n + j]; //Проверяем погрешность полученного значения if(count_eps > epsilint) { epsilint = count_eps; } T[i * n + j] = T_new[i * n + j]; } } interetaion++; }while(epsilint > eps || epsilint != eps);//повторяем пока погрешность не удовлетворяет условиям end = clock(); //Записываем время окончания итераций time = (end - start); //Высчитываем время /*Освобождаем память массивов из памяти CPU и GPU*/ free(T); free(T_new); cudaFree(cuda_T_in); cudaFree(cuda_T_out); Output(n, m, time, interetaion); //Вывод } ссылка на оригинал статьи http://habrahabr.ru/post/273771/
Добавить комментарий