 ARM Cortex-M3 — это, пожалуй, самое популярное на сегодняшний день 32-разрядное процессорное ядро для встраиваемых систем. Микроконтроллеры на его базе выпускают десятки производителей. Причина этому — универсальная, хорошо сбалансированная архитектура, а следствие — непрерывно растущая база готовых программных и аппаратных решений.
ARM Cortex-M3 — это, пожалуй, самое популярное на сегодняшний день 32-разрядное процессорное ядро для встраиваемых систем. Микроконтроллеры на его базе выпускают десятки производителей. Причина этому — универсальная, хорошо сбалансированная архитектура, а следствие — непрерывно растущая база готовых программных и аппаратных решений.
Ругать Cortex-M3, в общем-то, не за что, но сегодня я предлагаю подробно рассмотреть Cortex-M4F — расширенную версию всеми любимого процессорного ядра. Перенести проект с микроконтроллера на базе Cortex-M3 на кристалл на базе Cortex-M4F довольно просто, а для ряда задач такой переход стоит затраченных усилий.
Под катом краткий обзор современных Cortex’ов, обстоятельное описание блоков и команд, отличающих Cortex-M4F от Cortex-M3, а также сравнение процессорных ядер на реальной задаче — будем измерять частоту мерцания лампы на микроконтроллерах с разными ядрами.
Часть обзорная
О том как сменяли друг-друга поколения процессорных ядер ARM написано огромное количество статей и обзоров. Не вижу смысла расписывать всё то, что есть в википедии, но напомню основные факты.
Компания ARM Ltd. разрабатывает микропроцессорные и микроконтроллерные ядра с RISC-архитектурой и продает производителям электронных компонентов лицензии на производство кристаллов по соответствующей технологии. Таких производителей по всему миру десятки и даже сотни, есть среди них и отечественные компании.
Современные ядра ARM объединены названием Cortex.
Кстати говоря, слово «cortex» переводится как «кора головного мозга» — структура, отвечающая за согласованную работу органов, мышление, высшую нервную деятельность. По-моему, прекрасное название.
Итак, процессорные ядра ARM Cortex разделены на три основные группы:
- Cortex-A — Application Processors — для приложений, требующих высокой производительности; чаще всего на них запускается linux, android и им подобные ОС
- Cortex-R — Embedded Real-time Processors — для приложений реального времени
- Cortex-M — Embedded Processors — для встраиваемых систем
Рассмотрим последнюю группу, постепенно приближаясь к паре Cortex-M3 / Cortex-M4F. Всего на конец 2015 года представлено шесть процессорных ядер: Cortex-M0, -M0+, -M1, -M3, -M4, -M7.
Из этого списка часто «выпадает» Cortex-M1, это оттого, что -M1 разработан и используется исключительно в приложениях связанных с FPGA. Остальные ядра не имеют столь специализированной области применения и отличаются по производительности — от самого простого -M0 до высокопроизводительного -M7.

По сравнению с Cortex-M0, Cortex-M0+ дополнительно оснащен блоком защиты памяти MPU, буфером Micro Trace Buffer для отладки программ, а также имеет двухступенчатый конвейер вместо трехступенчатого и упрощенный доступ к периферийным блоками и линиям ввода/вывода.
Cortex-M0 и Cortex-M0+ имеют одношинную фон-неймановскую архитектуру, а ядро Cortex-M3 — уже гарвардскую. Cortex-M3 довольно сильно отличается от «младших» представителей линейки и имеет гораздо более широкие возможности.
Cortex-M4 построен по абсолютно той же архитектуре и «структурно» не отличается от Cortex-M3. Разница заключается в поддерживаемой системе команд, но об этом позже. Cortex-M4F отличается от -M4 наличием блока вычислений с плавающей точкой FPU.
Архитектура Cortex-M7 представлена относительно недавно и отличается от Cortex-M3/M4 так же сильно, как Cortex-M3/M4 отличаются от Cortex-M0. 6-ступенчатый суперскалярный конвейер, отдельная кэш-память для данных и команд, конфигурируемая память TCM и другие отличительные функции этого ядра «заточены» для достижения максимальной производительности. И действительно, возможности контроллеров на базе Cortex-M7 сравнивают скорее с Cortex-A5 и -R5, чем с другими контроллерами группы Embedded Processors. Границы применения технологий продолжают размываться.
Несмотря на совершенно разные возможности ядер группы Cortex-M, набор команд каждого ядра включает в себя все команды, поддерживаемые в более младших ядрах. Так обеспечивается возможность разработки программно-совместимых микроконтроллеров на базе разных ядер, этим и занимается большинство производителей микроконтроллеров.

Ядра Cortex-M0 и Cortex-M0+ имеют одну и ту же систему команд. Набор инструкций Cortex-M3 включает все команды Cortex-M0 и около сотни дополнительных инструкций. Процессорные ядра Cortex-M4 и Cortex-M7 имеют, опять же, идентичный набор команд — набора команд Cortex-M3 плюс так называемые DSP-инструкции. Ядро Cortex-M4F дополнительно к набору Cortex-M4 / -M7 поддерживает команды вычислений с плавающей точкой, а система команд Cortex-M7F включает ещё 14 команд для операций над числами с плавающей точкой двойной точности.
Часть теоретическая
Итак, ближайшими «соседями» популярного процессорного ядра Cortex-M3 являются Cortex-M4, дополненный поддержкой DSP-инструкций, и Cortex-M4F, дополнительно содержащий блок FPU и поддерживающий соответствующие команды. Рассмотрим DSP- и FPU-команды.
DSP-инструкции
Аббревиатура DSP чаще всего расшифровывается как Digital Signal Processor, т.е. отдельный и вполне самостоятельный контроллер или сопроцессор, предназначенный для задач цифровой обработки сигналов. Не стоит путать специализированную DSP-микросхему и набор DSP-инструкций. DSP-команды (расшифровывается Digital Signal Processing вместо Processor) — это набор команд, который поддерживается рядом процессорных ядрер ARM и соответствует некоторым типовым для цифровой обработки сигнала операциям.
Первая группа таких операций — это умножение с накоплением (Single-cycle Multiply Accumulate или просто MAC).
Для самых маленьких: умножение с накоплением описывается формулой S = S + A x B. Соответствующие команды описывают умножение двух регистров с суммированием результата в аккумулятор и смежные операции: умножение с вычитанием результата из аккумулятора, умножение без использования аккумулятора и т.д.
Операции предусмотрены для 16- и 32-разрядных переменных и играют важную роль во многих типовых алгоритмах цифровой обработки сигналов. Например, КИХ-фильтр (это классический, почти банальный «например») по сути представляет собой последовательность операций умножения с накоплением, а значит скорость его работы напрямую зависит от скорости выполнения умножения с накоплением.
Все MAC-инструкции в микроконтроллерах с ядром Cortex-M4(F) выполняются за один машинный цикл.
Вторая группа DSP-инструкций — это операции параллельной обработки данных (Single Instruction Multiple Data, SIMD), позволяющие оптимизировать обработку данных за счет параллелизма вычислений. Пары независимых переменных попарно помещаются в один регистр большей размерности, а арифметические операции проводятся уже над «большими» регистрами.
Например, команда SADD16 подразумевает одновременное сложение двух пар 16-разрядных знаковых чисел с записью результата в регистр, хранящий первый операнд.
SADD16 R1, R0 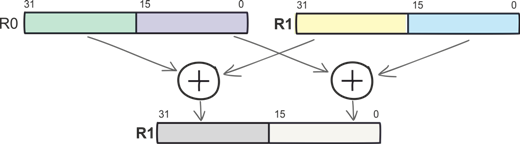
Поскольку регистры общего назначения имеют разрядность 32 бит, в каждый из них можно записать не только по две 16-разрядных переменных (полуслов), но и до четырех 8-разрядных переменных (байт). Несложно прикинуть зачем нужна команда SADD8.
Вот более сложная операция: умножение старших полуслов, умножение младших полуслов и суммирование произведений между собой и с 64-разрядным накоплением. Команда SMLALD описывает все эти действия и выполняется Cortex-M4 за один машинный цикл. SMLALD, как и многие другие команды, совмещает умножение с накоплением и обработку данных по принципу SIMD.
SMLALD R6, R8, R5, R1 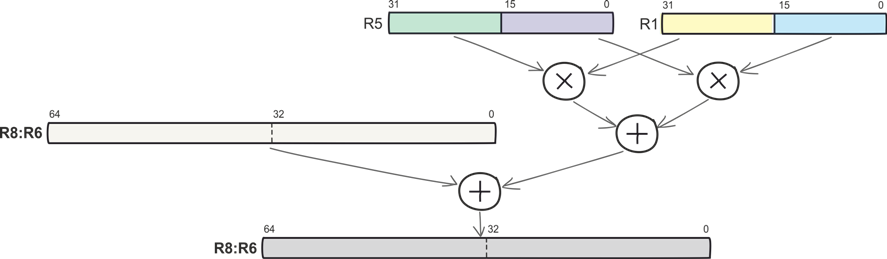
И простые SIMD-команды (знаковые и беззнаковые 8- и 16-разрядные сложение и вычитание и т.п.), и сложные команды, подобные SMLALD, выполняются за один машинный цикл.
Следующая группа DSP-инструкций — команды операций с насыщением (Saturating instructions). Они также известны как операции с отсечкой и представляют собой своеобразную защиту от переполнений. При использовании стандартных команд, регистр, хранящий результат, при переполнении «перезагружается» с нуля. Команды, предусматривающие насыщение, при переполнении фиксируют результат на допустимом разрядностью максимуме и с программиста снимается необходимость заботиться о флагах переполнения.
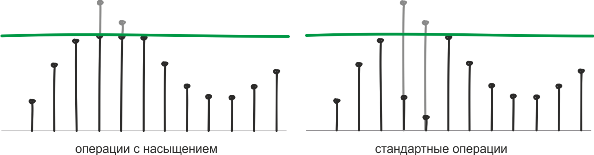
Среди команд процессорного ядра Cortex-M4 есть и «обычные» арифметические операции, и те же операции с насыщением. Использование последних особенно востребовано в задачах, где точностью вычислений можно пожертвовать ради скорости и таких в ЦОС немало.
FPU-инструкции
Аппаратная поддержка вычислений с плавающей запятой (или точкой, кому как больше нравится) — это особенность ядра Cortex-M4F и более старших представителей линейки Cortex-M.
Команды вычислений с плавающей точкой позволяют выполнять операции над вещественными числами с максимальной производительностью. Вообще, для представления вещественных чисел сегодня используется два формата — с фиксированной и плавающей точкой. В первом случае количество разрядов для записи целой и дробной частей зафиксировано и вычисления сводятся к операциям над целыми числами, во втором число представляется как совокупность знакового бита, нескольких разрядов порядка и мантиссы:
(-1)s * m × be,
где s — знак, b-основание, e — порядок, а m — мантисса
Использование формата с плавающей точкой предпочтительно при обработке сигналов за счет гораздо более широкого диапазона значений переменных формата float. Использование операций FPU также избавляет разработчика от необходимости следить за разрядностью. Формат чисел с плавающей точкой одинарной точности описывается стандартом IEEE 754, это представление и используется в микроконтроллерах с ядром Cortex-M4F. Диапазон допустимых значений составляет (10–38… 1038) при приблизительном пересчете в десятичные числа.

Для формата чисел с плавающей запятой двойной точности, как в Cortex-M7F, используется тот же принцип, но вместо 32-разрядного представления используется 64-разрядное, на порядок приходится 11 бит, а на мантиссу 52.
О том как и зачем используется формат с плавающей точкой не раз написано на хабре (вот , например, отличная статья). Мне, пожалуй, не написать лучше, поэтому идем дальше.
Список ассемблерных DSP- и FPU-команд
Чтобы немного прочувствовать масштаб и понять насколько может быть ускорена обработка данных с использованием Cortex-M4 можно поизучать полный перечень DSP- и FPU-инструкций. У меня есть большие сомнения на счет практической ценности этих таблиц, это хотя бы показательно. Все DSP- и большинство FPU-инструкций выполняются за один машинный цикл.
| Команда | Операция |
| PKHTB, PKHBT | перезапись полуслова из одного регистра в другой, при необходимости сдвиг содержимого "принимающего" регистра |
| QADD | знаковое сложение с насыщением |
| QADD16 | знаковое сложение соответствующих полуслов двух операндов (с насыщением) |
| QADD8 | знаковое сложение соответствующих байт двух операндов (с насыщением) |
| QASX | знаковое сложение младшего полуслова второго операнда и старшего полуслова первого операнда, знаковое вычитание старшего полуслова второго операнда из младшего полуслова первого операнда (с насыщением) |
| QDADD | удвоение второго операнда, суммирование результата с первым операндом (знаковое, с насыщением) |
| QDSUB | удвоение второго операнда, вычитание результата из первого операнда (знаковое, с насыщением) |
| QSAX | знаковое вычитание младшего полуслова второго операнда из старшего полуслова первого операнда + знаковое сложение младшего полуслова первого операнда и старшего полуслова второго операнда (с насыщением) |
| QSUB | знаковое вычитание (с насыщением) |
| QSUB16 | знаковое вычитание соответствующих полуслов двух операндов (с насыщением) |
| QSUB8 | знаковое вычитание соответствующих байт двух операндов (с насыщением) |
| SADD16 | знаковое сложение соответствующих полуслов двух операндов |
| SADD8 | знаковое сложение соответствующих байт двух операндов |
| SASX | знаковое сложение старшего полуслова первого пперанда и младшего полуслова второго операнда с записью в старшее полуслово результата, знаковое вычитание младшего полуслова второго операнда из старшего полуслова первого с записью в младшее полуслово результата |
| SEL | выбор байтов из операндов в соответствии с битами GE[3:0] ("флаги", устанавливающиеся при выполнении различных условий типа «больше или равно» при выполнении арифметических операций) |
| SHADD16 | знаковое сложение соответствующих полуслов операндов, сдвиг двух результатов на один бит вправо |
| SHADD8 | знаковое сложение соответствующих байт операндов, сдвиг четырех результатов на один бит вправо |
| SHASX | знаковое сложение старшего полуслова первого операнда и младшего полуслова второго операнда, запись результата в старшее полуслово указанного регистра со сдвигом вправо на один бит, знаковое вычитание старшего полуслова второго операнда из младшего полуслова первого операнда, запись результата в младшее полуслово указанного регистра со сдвигом вправо на один бит |
| SHSAX | знаковое вычитание младшего полуслова второго операнда из старшего полуслова первого операнда, запись результата в младшее полуслово указанного регистра со сдвигом вправо на один бит, знаковое сложение старшего полуслова второго операнда и младшего полуслова первого операнда, запись результата в старшее полуслово указанного регистра со сдвигом вправо на один бит |
| SHSUB16 | знаковое вычитание старшего и младшего полуслов второго операнда из соответствующих полуслов первого операнда, сдвиг результат на бит вправо |
| SHSUB8 | знаковое вычитание старшего и младшего байт второго операнда из соответствующих байтов первого операнда, сдвиг результат на бит вправо |
| SMLABB, SMLABT, SMLATB, SMLATT | умножение верхних или нижних полуслов двух операндов с 32-разрядным накоплением |
| SMLAD, SMLADX | попарное умножение полуслов двух операндов, суммирование двух произведение с 32-разрядным накоплением |
| SMLALBB, SMLALBT, SMLALTB, SMLALTT | умножение знаковых полуслов двух операндов (старших или младших) с 64-разрядным накоплением и 64-разрядным результатом |
| SMLALD, SMLALDX | попарное умножение двух байт, взятых из первого операнда на два байта из второго операнда, суммирование двух полученных произведений с 64-разрядным накоплением и 64-разрядным результатом |
| SMLAWB, SMLAWT | умножение верхнего или нижнего полуслова первого операнда на второй операнд с 32-разрядным накоплением, в результирующий регистр записываюся первые 32 разряда 48-битного результата |
| SMLSD | вычитание произведения старших полуслов двух операндов из младших полуслов двух операндов с 32-разрядным накоплением |
| SMLSLD | вычитание произведения старших полуслов двух операндов из младших полуслов двух операндов с 64-разрядным накоплением |
| SMMLA | умножение двух операндов с 32-разрядным накоплением (берутся только 32 старших разряда произведения) |
| SMMLS, SMMLR | умножение двух операндов, вычитание результата из указанного регистра (берутся только 32 старших разряда произведения) |
| SMMUL, SMMULR | умножение операндов (результат — старшие 32-разрядна произведения) |
| SMUAD | умножение старших полуслов двух операндов, умножение младших полуслов двух операндов, сложение произведений |
| SMULBB, SMULBT SMULTB, SMULTT | умножение верхних или нижних полуслов двух оперндов |
| SMULWB, SMULWT | умножение первого операнда на верхнее или нижнее полуслово второго операнда, в результирующий регистр записываюся первые 32 разряда 48-битного результата |
| SMUSD, SMUSDX | умножение старших полуслов двух операндов, умножение младших полуслов двух операндов, вычитание первого произведения из второго |
| SSAT16 | знаковое насыщение полуслов до указанного значения |
| SSAX | знаковое вычитание младшего полуслова второго операнда из старшего полуслова первого операнда с записью в младшее полуслово результата, сложение старшего полуслова первого операнда и младшего полуслова второго операнда с записью в старшее полуслово результата |
| SSUB16 | знаковое вычитание соответствующих полуслов двух операндов |
| SSUB8 | знаковое вычитание соответствующих байт двух операндов |
| SXTAB | извлечение бит [7:0] из регистра и их преобразование в 32-разрядное слово с учетом знака, сложение результата со словом или полусловом |
| SXTAB16 | извлечение бит [7:0] и [23:16] из регистра, их преобразование в полуслова с учетом знака, сложение результата со словом или полусловом |
| SXTAH | извлечение бит [15:0] из регистра и их преобразование в 32-разрядное слово с учетом знака, сложение результата со словом или полусловом |
| SXTB16 | преобразование двух байт в два полуслова с учетом знака, сложение результата со словом или полусловом |
| UADD16 | беззнаковое сложение соответствующих полуслов двух операндов |
| UADD8 | беззнаковое сложение соответствующих байт двух операндов |
| USAX | сложение младшего полуслова первого операнда и старшего полуслова второго операнда с записью результата в младшее полуслово результата, беззнаковое вычитание младшего полуслова второго операнда из старшего полуслова первого операнда с записью в старшее полуслово результата |
| UHADD16 | беззнаковое сложение соответствующих полуслов двух операндов и сдвиг результатов на один бит вправо |
| UHADD8 | беззнаковое сложение соответствующих байт двух операндов и сдвиг результатов на один бит вправо |
| UHASX | беззнаковое сложение старшего полуслова первого операнда и младшего полуслова второго операнда со сдвигом результата сложения на один бит вправо и записью в старшее полуслово результата, беззнаковое вычитание старшего полуслова второго операнда из младшего полуслова первого операнда со сдвигом результата вычитания на один бит вправо и записью в младшее полуслово результата |
| UHSAX | беззнаковое вычитание млдашего полуслова второго операнда из старшего полуслова первого операнда со сдвигом результата вычитания на один бит вправо и записью в старшее полуслово результата, беззнаковое сложение младшего полуслова первого операнда и старшего полуслова второго операнда со сдвигом результата сложения на один бит вправо и записью в младшее полуслово результата, |
| UHSUB16 | беззнаковое вычитание соответствующих полуслов двух операндов, сдвиг результата на один бит вправо |
| UHSUB8 | беззнаковое вычитание соответствующих байт двух операндов, сдвиг результата на один бит вправо |
| UMAAL | беззнаковое умножение с двойным 32-разрядным накоплением и 64-разряжным результатом |
| UQADD16 | беззнаковое сложение 16-разрядных переменных (с насыщением) |
| UQADD8 | беззнаковое сложение 8-разрядных переменных (с насыщением) |
| UQASX | беззнаковое вычитание младшего полуслова второго операнда из старшего полуслова первого операнда, беззнаковое сложение младшего полуслова первого операнда и старшего полуслова второго операнда (с насыщением) |
| UQSAX | беззнаковое вычитание младшего полуслова второго операнда из старшего полуслова первого операнда, беззнаковое сложение младшего полуслова первого операнда и старшего полуслова второго операнда (с насыщением) |
| UQSUB16 | беззнаковое вычитание соответствующих полуслов двух операндов (с насыщением) |
| UQSUB8 | беззнаковое вычитание соответствующих байт двух операндов (с насыщением) |
| USAD8 | беззнаковое вычитание соответствующих байт двух операндов, сложение абсолютных разностей |
| USADA8 | беззнаковое вычитание соответствующих байт двух операндов, сложение абсолютных разностей, сложение результат операции с содержимым аккумулятора |
| USAT16 | беззнаковое насыщение полуслов до указанного значения |
| UASX | беззнаковое вычитание старшего полуслова второго операнда из младшего полуслова первого операнда с записью в младшее полуслово результата, сложение старшего полуслова первого операнда и младшего полуслова второго операнда с записью результата в старшее полуслова результата |
| USUB16 | беззнаковое вычитание соответствующих полуслов двух операндов |
| USUB8 | беззнаковое вычитание соответствующих байт двух операндов |
| UXTAB | извлечение бит [7:0] из регистра и их преобразование в 32-разрядное слово без учета знака, сложение результата со словом или полусловом |
| UXTAB16 | извлечение бит [7:0] и [23:16] из регистра, их преобразование в полуслова без учета знака, сложение результата со словом или полусловом |
| UXTAH | извлечение бит [15:0] из регистра и их преобразование в 32-разрядное слово без учета знака, сложение результата со словом или полусловом |
| UXTB16 | преобразование двух байт в два полуслова без учета знака, сложение результата со словом или полусловом |
| Команда | Операция |
| VABS.F32 | получение абсолютного значения операнда |
| VADD.F32 | сложение операндов |
| VCMP.F32 | сравнение двух операндов или операнда и нуля |
| VCMPE.F32 | сравнение двух операндов или операнда и нуля с проверкой на некорректный операнд (NaN) |
| VCVT.S32.F32 | преобразование между типами данных (с плавающей точкой / целые) |
| VCVT.S16.F32 | преобразование между типами данных (с плавающей точкой / с фиксированной точкой) |
| VCVTR.S32.F32 | преобразование между типами данных (с плавающей точкой / целые) с округлением |
| VCVT<B|H>.F32.F16 | преобразование между типами данных (полуслово с плавающей точкой — оно же "число с половинной точностью" / с плавающей точкой) |
| VCVTT<B|T>.F32.F16 | преобразование между типами данных (с плавающей точкой / полуслово с плавающей точкой ) |
| VDIV.F32 | деление операндов |
| VFMA.F32 | перемножение двух переменных, прибавление результата умножения к содержимому указанного регистра |
| VFNMA.F32 | инвертирование первого опренда, умножение результата на второй операнд, сложение произведения и инвертированного значения из указанного регистра |
| VFMS.F32 | инвертирование первого опренда, умножение результата на второй операнд, сложение произведения и значения из указанного регистра |
| VFNMS.F32 | умножение двух операндов, сложение произведения и инвертированного значения из указанного регистра |
| VLDM.F<32|64> | извлечение содержимого нескольких указанных регистров из памяти программ |
| VLDR.F<32|64> | извлечение содержимого указанного регистра из памяти программ |
| VLMA.F32 | умножение с накоплением |
| VLMS.F32 | вычитание произведения двух операндов из указанного регистра |
| VMOV | пересылки данных между "стандартными" регистрами ARM и регистрами FPSCR (Floating-Point Status and Control Register), пересылки данных между регистрами хранящими формата с плавающей точкой (регистры FPU), запись констант в регистры FPU и т.п. |
| VMOV, VMRS, VMSR | пересылки данных между "стандартными" регистрами ARM и регистрами FPSCR (Floating-Point Status and Control Register) |
| VMUL.F32 | умножение операндов |
| VNEG.F32 | инвертирование |
| VNMLA.F32 | умножение двух операндов, инвентирование результата, сложение инвертированого произведения и инвертированного значения из указанного регистра |
| VNMLS.F32 | умножение двух операндов, произведения и инвертированного значения из указанного регистра |
| VNMUL | умножение двух операндов, инвентирование результата |
| VPOP | таки pop |
| VPUSH | таки push |
| VSQRT.F32 | извлечение квадратного корня |
| VSTM | сохранение содержимого нескольких указанных регистров в память программ |
| VSTR.F<32|64> | сохранение содержимого указанного регистра в память программ |
| VSUB.F<32|64> | вычитание операндов |
Впрочем, на практике сами инструкции ядра используются не часто. Обычно при разработке достаточно разобраться с документацией на контроллер и сишными библиотеками от производителей ядра и кристалла. В частности, для ядер Cortex существует ARM-овский набор библиотек CMSIS, который используется для процессоров Cortex-M от разных производителей. В состав CMSIS входит и библиотека CMSIS-DSP, она включает в себя:
- базовые математические функции, операции над векторами
- быстрые тригонометрические и трансцендентные функции (sin, cos, sqrt и т.д.)
- линейную и билинейную интерполяции
- комплексную арифметику
- статистические функции
- алгоритмы фильтрации – БИХ-, КИХ- фильтры, алгоритм минимальной среднеквадратичной ошибки
- алгоритмы преобразования сигналов (БПФ и др.)
- матричную арифметику
- ПИД-регулятор
- функции для работы с массивами
Часть практическая
Как правило, сравнение ядер Cortex-M3 и Cortex-M4(F) заканчивается красивыми графиками — гистограммами, на которых показано значительное ускорение работы контроллера на базе -M4 при выполнении типовых для ЦОС операций (КИХ-фильтр, БПФ, матричные вычисления, ПИД-регулятор и т.п). Без указаний используемых контроллеров, методики вычислений и измерений.
Но мы не будем сравнивать Тайд и Обычный стиральный порошок, а возьмем реальную аппаратную и программную платформу.
На этом месте есть смысл отвлечься и немного поразмышлять задачах, для которых актуален описанный математический аппарат Cortex-M4F. Понятно, что на работу с потоковыми данными и разным мультимедиа производительности не хватит, речь идет скорее о системах управления и обработки данных.
Например, идет сбор каких-то телеметрических данных. Узел опроса датчиков может либо просто управлять датчиками и передавать массивы данных на некий центральный вычислительный узел, либо самостоятельно обрабатывать и фильтровать результаты измерений, передавая «центру» только полезные данные. Второй подход имеет ряд очевидных преимуществ — уменьшаются затраты на коммуникации, за счет распределенных вычислений повышается надежность системы и упрощается её масштабирование.
Я не имею в виду только большие и сложные распределенные системы. Представьте себе какой-нибудь модный фитнес-браслет. Будет он передавать всё что намерил на вашем пульсе через bluetooth смартфону? Конечно, нет. Браслет сам проанализирует данные и отправит только одну маленькую посылочку с результатом.
И вот мы подошли к главному. Что чаще всего важно контроллера, который осуществляет вычисления «на месте»? Энергопотребление! Чем меньше варемени занимает обработка данных, тем больше времени микроконтроллер проводит в режиме сна и тем дольше устройство работает без подзарядки.
Так мы вполне логично дошли до того чтобы рассмотреть микроконтроллеры серии EFM32 Wonder Gecko от SiLabs. Они классные и вы можете купить их в ЭФО по отличным ценам оптом и в розницу. Кхе-кхе.
EFM32WG — серия микроконтроллеров на базе ядра Cortex-M4F. Как и другие EFM32, они ориентированы на малопотребляющие устройства и предоставляют разные программные и аппаратные средства для контроля над энергопотреблением. Эти средства мы будем использовать для сравнения ядер Cortex-M3 и Cortex-M4F.
Аппаратная часть:
Плата EFM32WG-STK3800 — кит для работы с микроконтроллером на базе ядра Cortex-M4F
Плата EFM32GG-STK3700 — кит для работы с микроконтроллером на базе ядра Cortex-M3
Платы отличатся между собой только целевым микроконтроллером.

Программная часть
В описываемом эксперимента использовалась платформа Simplicity Studio. Это SiLabs-овская оболочка, которая объединяет все программы, утилиты, примеры и документы, доступные для микроконтроллеров от Silabs. Сейчас понадобятся несколько её компонентов — IDE, утилита для контроля энергопотребления energy profiler, а также готовый проект из набора примеров и user guide на используемые платы.
Суть эксперимента
Одна из программ из набора готовых примеров использует Быстрое Преобразование Фурье для измерения частоты мерцания внешнего источника света. Если вкратце, то сигнал с датчика освещенности поступает на АЦП, результаты измерений буферизируются, и раз в 0,5 сек производятся вычисления: по выборке из 512 результатов измерений с использованием БПФ выделяется частота основной гармоники. На ЖКИ выводится результат вычислений и количество машинных циклов за которые была исполнена функция ProcessFFT().
Ресурсоемкой является только часть алгоритма, связанная с анализом измерений. Запустим одну и ту же программу на двух платах и сравним длительность вычислений и уровень энергопотребления.
Открываем Simplicity Studio, включаем Simplicity IDE, компилируем проект.
/***************************************************************************//** * @file lightsensefft.c * @brief FFT transform example * @details * Use ADC in order to capture and analyse input from the * light sensor on the STK. Runs floating point FFT algorithm from the CMSIS * DSP Library, and estimate the frequency of the most luminous light source * using sinc interpolation. The main point with this example is to show the * use of the CMSIS DSP library and the floating point capability of the CPU. * * @par Usage * Connect the light sensor output to the ADC input by shorting pins * 15 and 14 on the EXP_HEADER of the STK. * Direct various light sources to the light sensor. Expect no specific * frequency from daylight or from a flashlight. Mains powered incandescent * bulbs should give twice the mains frequency. Using another STK running the * "blink" example modified to various blink rates is an excellent signal * source. The frequency bandwidth is approximately 10-500 Hz. * The frequency shows in the 4 digit numerical display upper right on * the LCD. The LCD also displays the number of CPU cycles used to do * the FFT transform. * * @author Silicon Labs * @version 1.04 ******************************************************************************* * @section License * <b>(C) Copyright 2014 Silicon Labs, http://www.silabs.com</b> ******************************************************************************* * * Permission is granted to anyone to use this software for any purpose, * including commercial applications, and to alter it and redistribute it * freely, subject to the following restrictions: * * 1. The origin of this software must not be misrepresented; you must not * claim that you wrote the original software. * 2. Altered source versions must be plainly marked as such, and must not be * misrepresented as being the original software. * 3. This notice may not be removed or altered from any source distribution. * * DISCLAIMER OF WARRANTY/LIMITATION OF REMEDIES: Silicon Labs has no * obligation to support this Software. Silicon Labs is providing the * Software "AS IS", with no express or implied warranties of any kind, * including, but not limited to, any implied warranties of merchantability * or fitness for any particular purpose or warranties against infringement * of any proprietary rights of a third party. * * Silicon Labs will not be liable for any consequential, incidental, or * special damages, or any other relief, or for any claim by any third party, * arising from your use of this Software. * ******************************************************************************/ #include "em_common.h" #include "em_emu.h" #include "em_cmu.h" #include "em_chip.h" #include "em_adc.h" #include "em_gpio.h" #include "em_rtc.h" #include "em_acmp.h" #include "em_lesense.h" #include "segmentlcd.h" #include "arm_math.h" #include "math.h" /** * Number of samples processed at a time. This number has to be equal to one * of the accepted input sizes of the rfft transform of the CMSIS DSP library. * Increasing it gives better resolution in the frequency, but also a longer * sampling time. */ #define BUFFER_SAMPLES 512 /** (Approximate) sample rate used for sampling data. */ #define SAMPLE_RATE (1024) /** The GPIO pin used to power the light sensor. */ #define EXCITE_PIN gpioPortD,6 /* Default configuration for alternate excitation channel. */ #define LESENSE_LIGHTSENSE_ALTEX_DIS_CH_CONF \ { \ false, /* Alternate excitation enabled.*/ \ lesenseAltExPinIdleDis, /* Alternate excitation pin is disabled in idle. */ \ false /* Excite only for corresponding channel. */ \ } /* ACMP */ #define ACMP_NEG_REF acmpChannelVDD #define ACMP_THRESHOLD 0x38 /* Reference value for the lightsensor. * Value works well in office light * conditions. Might need adjustment * for other conditions. */ /* LESENSE Pin config */ #define LIGHTSENSE_CH 6 #define LIGHTSENSE_EXCITE_PORT gpioPortD #define LIGHTSENSE_EXCITE_PIN 6 #define LIGHTSENSE_SENSOR_PORT gpioPortC #define LIGHTSENSE_SENSOR_PIN 6 #define LCSENSE_SCAN_FREQ 5 #define LIGHTSENSE_INTERRUPT LESENSE_IF_CH6 /** Buffer of uint16_t sample values ready to be FFT-ed. */ static uint16_t lightToFFTBuffer[BUFFER_SAMPLES]; /** Buffer of float samples ready for FFT. */ static float32_t floatBuf[BUFFER_SAMPLES]; /** Complex (interleaved) output from FFT. */ static float32_t fftOutputComplex[BUFFER_SAMPLES * 2]; /** Magnitude of complex numbers in FFT output. */ static float32_t fftOutputMag[BUFFER_SAMPLES]; /** Flag used to indicate whether data is ready for processing */ static volatile bool dataReadyForFFT; /** Indicate whether we are currently processing data through FFT */ static volatile bool processingFFT; /** Instance structures for float32_t RFFT */ static arm_rfft_instance_f32 rfft_instance; /** Instance structure for float32_t CFFT used by the RFFT */ static arm_cfft_radix4_instance_f32 cfft_instance; /**************************************************************************//** * Interrupt handlers prototypes *****************************************************************************/ void LESENSE_IRQHandler(void); /**************************************************************************//** * Functions prototypes *****************************************************************************/ void setupCMU(void); void setupACMP(void); void setupLESENSE(void); /**************************************************************************//** * @brief LESENSE_IRQHandler * Interrupt Service Routine for LESENSE Interrupt Line *****************************************************************************/ void LESENSE_IRQHandler(void) { /* Clear interrupt flag */ LESENSE_IntClear(LIGHTSENSE_INTERRUPT); } /***************************************************************************//** * @brief Enables LFACLK and selects osc as clock source for RTC ******************************************************************************/ void RTC_Setup(CMU_Select_TypeDef osc) { RTC_Init_TypeDef init; /* Ensure LE modules are accessible */ CMU_ClockEnable(cmuClock_CORELE, true); /* Enable osc as LFACLK in CMU (will also enable oscillator if not enabled) */ CMU_ClockSelectSet(cmuClock_LFA, osc); /* Division prescaler to decrease consumption. */ CMU_ClockDivSet(cmuClock_RTC, cmuClkDiv_32); /* Enable clock to RTC module */ CMU_ClockEnable(cmuClock_RTC, true); init.enable = false; init.debugRun = false; init.comp0Top = true; /* Count only to top before wrapping */ RTC_Init(&init); /* RTC clock divider is 32 which gives 1024 ticks per second. */ RTC_CompareSet(0, ((1024 * SAMPLE_RATE) / 1000000)-1); /* Enable interrupt generation from RTC0, needed for WFE (wait for event). */ /* Notice that enabling the interrupt in the NVIC is not needed. */ RTC_IntEnable(RTC_IF_COMP0); } /**************************************************************************//** * @brief Enable clocks for all the peripherals to be used *****************************************************************************/ void setupCMU(void) { /* Ensure core frequency has been updated */ SystemCoreClockUpdate(); /* Set the clock frequency to 11MHz so the ADC can run on the undivided HFCLK */ CMU_HFRCOBandSet(cmuHFRCOBand_11MHz); /* ACMP */ CMU_ClockEnable(cmuClock_ACMP0, true); /* GPIO */ CMU_ClockEnable(cmuClock_GPIO, true); /* ADC */ CMU_ClockEnable(cmuClock_ADC0, true); /* Low energy peripherals * LESENSE * LFRCO clock must be enables prior to enabling * clock for the low energy peripherals */ CMU_ClockSelectSet(cmuClock_LFA, cmuSelect_LFRCO); CMU_ClockEnable(cmuClock_CORELE, true); CMU_ClockEnable(cmuClock_LESENSE, true); /* RTC */ CMU_ClockEnable(cmuClock_RTC, true); /* Disable clock source for LFB clock. */ CMU_ClockSelectSet(cmuClock_LFB, cmuSelect_Disabled); } /**************************************************************************//** * @brief Sets up the ACMP *****************************************************************************/ void setupACMP(void) { /* Configuration structure for ACMP */ static const ACMP_Init_TypeDef acmpInit = { .fullBias = false, /* The lightsensor is slow acting, */ .halfBias = true, /* comparator bias current can be set to lowest setting.*/ .biasProg = 0x0, /* Analog comparator will still be fast enough */ .interruptOnFallingEdge = false, /* No comparator interrupt, lesense will issue interrupts. */ .interruptOnRisingEdge = false, .warmTime = acmpWarmTime512, /* Not applicable, lesense controls this. */ .hysteresisLevel = acmpHysteresisLevel5, /* Some hysteresis will prevent excessive toggling. */ .inactiveValue = false, /* Not applicable, lesense controls this. */ .lowPowerReferenceEnabled = false, /* Can be enabled for even lower power. */ .vddLevel = 0x00, /* Not applicable, lesense controls this through .acmpThres value. */ .enable = false /* Not applicable, lesense controls this. */ }; /* Initialize ACMP */ ACMP_Init(ACMP0, &acmpInit); /* Disable ACMP0 out to a pin. */ ACMP_GPIOSetup(ACMP0, 0, false, false); /* Set up ACMP negSel to VDD, posSel is controlled by LESENSE. */ ACMP_ChannelSet(ACMP0, acmpChannelVDD, acmpChannel0); /* LESENSE controls ACMP thus ACMP_Enable(ACMP0) should NOT be called in order * to ensure lower current consumption. */ } /**************************************************************************//** * @brief Sets up the LESENSE *****************************************************************************/ void setupLESENSE(void) { /* LESENSE configuration structure */ static const LESENSE_Init_TypeDef initLesense = { .coreCtrl = { /* LESENSE configured for periodic scan. */ .scanStart = lesenseScanStartPeriodic, .prsSel = lesensePRSCh0, .scanConfSel = lesenseScanConfDirMap, .invACMP0 = false, .invACMP1 = false, .dualSample = false, .storeScanRes = false, .bufOverWr = true, .bufTrigLevel = lesenseBufTrigHalf, .wakeupOnDMA = lesenseDMAWakeUpDisable, .biasMode = lesenseBiasModeDutyCycle, /* Lesense should duty cycle comparator and related references etc. */ .debugRun = false }, .timeCtrl = { .startDelay = 0 /* No start delay needed for this application. */ }, .perCtrl = { /* DAC is not needed for this application. */ .dacCh0Data = lesenseDACIfData, .dacCh0ConvMode = lesenseDACConvModeDisable, .dacCh0OutMode = lesenseDACOutModeDisable, .dacCh1Data = lesenseDACIfData, .dacCh1ConvMode = lesenseDACConvModeDisable, .dacCh1OutMode = lesenseDACOutModeDisable, .dacPresc = 0, .dacRef = lesenseDACRefBandGap, .acmp0Mode = lesenseACMPModeMuxThres, /* Allow LESENSE to control ACMP mux and reference threshold. */ .acmp1Mode = lesenseACMPModeMuxThres, .warmupMode = lesenseWarmupModeNormal /* Normal mode means LESENSE is allowed to dutycycle comparator and reference. */ }, .decCtrl = { /* Decoder or statemachine not used in this code example. */ .decInput = lesenseDecInputSensorSt, .initState = 0, .chkState = false, .intMap = true, .hystPRS0 = false, .hystPRS1 = false, .hystPRS2 = false, .hystIRQ = false, .prsCount = true, .prsChSel0 = lesensePRSCh0, .prsChSel1 = lesensePRSCh1, .prsChSel2 = lesensePRSCh2, .prsChSel3 = lesensePRSCh3 } }; /* Channel configuration */ /* Only one channel is configured for the lightsense application. */ static const LESENSE_ChDesc_TypeDef initLesenseCh = { .enaScanCh = true, .enaPin = false, /* Pin is input, no enabling needed. Separate pin is exciting the sensor. */ .enaInt = true, /* Enable interrupt for this channel. */ .chPinExMode = lesenseChPinExHigh, /* Excite by pullin pin high. */ .chPinIdleMode = lesenseChPinIdleDis, /* During Idle, excite pin should be disabled (tri-stated). */ .useAltEx = true, /* Use alternate excite pin. */ .shiftRes = false, /* Not applicable, only for decoder operation. */ .invRes = false, /* No need to invert result. */ .storeCntRes = true, /* Not applicable, don't care really. */ .exClk = lesenseClkLF, /* Using low frequency clock for timing the excitation. */ .sampleClk = lesenseClkLF, /* Using low frequency clock for timing the sample instant. */ .exTime = 0x01, /* 1 LFclk cycle is enough excitation time, this depends on response time of light sensor. */ .sampleDelay = 0x01, /* Sampling should happen when excitation ends, it it happens earlier, excitation time might as well be reduced. */ .measDelay = 0x00, /* Not used here, basically only used for applications which uses the counting feature. */ .acmpThres = ACMP_THRESHOLD, /* This is the analog comparator threshold setting, determines when the acmp triggers. */ .sampleMode = lesenseSampleModeACMP, /* Sampling acmp, not counting. */ .intMode = lesenseSetIntLevel, /* Interrupt when voltage goes above threshold. */ .cntThres = 0x0000, /* Not applicable. */ .compMode = lesenseCompModeLess /* Not applicable. */ }; /* Alternate excitation channels configuration. */ /* The lightsensor is excited by alternate excite channel 0. */ static const LESENSE_ConfAltEx_TypeDef initAltEx = { .altExMap = lesenseAltExMapALTEX, .AltEx[0] = { .enablePin = true, .idleConf = lesenseAltExPinIdleDis, .alwaysEx = true }, .AltEx[1] = LESENSE_LIGHTSENSE_ALTEX_DIS_CH_CONF, .AltEx[2] = LESENSE_LIGHTSENSE_ALTEX_DIS_CH_CONF, .AltEx[3] = LESENSE_LIGHTSENSE_ALTEX_DIS_CH_CONF, .AltEx[4] = LESENSE_LIGHTSENSE_ALTEX_DIS_CH_CONF, .AltEx[5] = LESENSE_LIGHTSENSE_ALTEX_DIS_CH_CONF, .AltEx[6] = LESENSE_LIGHTSENSE_ALTEX_DIS_CH_CONF, .AltEx[7] = LESENSE_LIGHTSENSE_ALTEX_DIS_CH_CONF }; /* Initialize LESENSE interface _with_ RESET. */ LESENSE_Init(&initLesense, true); /* Configure LESENSE channel */ LESENSE_ChannelConfig(&initLesenseCh, LIGHTSENSE_CH); /* Configure alternate excitation channels */ LESENSE_AltExConfig(&initAltEx); /* Set scan frequency */ LESENSE_ScanFreqSet(0, LCSENSE_SCAN_FREQ); /* Set clock divisor for LF clock. */ LESENSE_ClkDivSet(lesenseClkLF, lesenseClkDiv_2); } /**************************************************************************//** * @brief Sets up the GPIO *****************************************************************************/ void setupGPIO(void) { /* Configure the drive strength of the ports for the light sensor. */ GPIO_DriveModeSet(LIGHTSENSE_EXCITE_PORT, gpioDriveModeStandard); GPIO_DriveModeSet(LIGHTSENSE_SENSOR_PORT, gpioDriveModeStandard); /* Initialize the 2 GPIO pins of the light sensor setup. */ GPIO_PinModeSet(LIGHTSENSE_EXCITE_PORT, LIGHTSENSE_EXCITE_PIN, gpioModePushPull, 0); GPIO_PinModeSet(LIGHTSENSE_SENSOR_PORT, LIGHTSENSE_SENSOR_PIN, gpioModeDisabled, 0); } /**************************************************************************//** * @brief Configure ADC for 12 bit mode, sample channel 0 with Vdd as reference * and use shortest acquisition time. *****************************************************************************/ static void ADC_Config(void) { CMU_ClockEnable(cmuClock_ADC0, true); ADC_Init_TypeDef init = ADC_INIT_DEFAULT; ADC_InitSingle_TypeDef singleInit = ADC_INITSINGLE_DEFAULT; /* Init common settings for both single conversion and scan mode- */ /* Set timebase to 10, this gives 11 cycles which equals 1us at 11 MHz. */ init.timebase = 10; /* Set ADC clock prescaler to 0, we are using 11MHz HFRCO, which results in HFPERCLK < 13MHz- */ init.prescale = 0; ADC_Init(ADC0, &init); /* Init for single conversion use, measure channel 0 with Vdd as reference. */ /* Using Vdd as reference removes the 5us warmup time for the bandgap reference. */ singleInit.reference = adcRefVDD; singleInit.input = adcSingleInpCh5; /* Resolution can be set lower for even more energy efficient operation. */ singleInit.resolution = adcRes8Bit; /* Assuming we are mesuring a low impedance source we can safely use the shortest */ /* acquisition time. */ singleInit.acqTime = adcAcqTime1; ADC_InitSingle(ADC0, &singleInit); /* Enable ADC Interrupt when Single Conversion Complete. */ /* This is necessary for WFE (wait for event) to work. */ /* Notice that enabling the interrupt in the NVIC is not needed. */ ADC0->IEN = ADC_IEN_SINGLE; } /**************************************************************************//** * @brief A separate function for taking all the samples is preferred since * the whole idea is to stay in EM2 between samples. If other code is added, * it might be more energy efficient to configure the ADC to use DMA while * the cpu can do other work. *****************************************************************************/ void doAdcSampling(uint16_t* buffer) { uint16_t sample_count = 0; /* Enable RTC, this can be enabled all the time as well if needed. */ RTC_Enable(true); while(sample_count < BUFFER_SAMPLES) { /* Enable deep sleep to enter EM2 between samples. */ SCB->SCR = SCB_SCR_SEVONPEND_Msk | SCB_SCR_SLEEPDEEP_Msk; /* Go to sleep while waiting for RTC event (set by RTC_IRQ pending bit) */ /* Since IRQ is not enabled in the NVIC, no ISR will be entered */ __WFE(); /* Start ADC conversion as soon as we wake up. */ ADC_Start(ADC0, adcStartSingle); /* Clear the interrupt flag */ RTC_IntClear(RTC_IF_COMP0); /* Clear pending RTC IRQ */ NVIC_ClearPendingIRQ(RTC_IRQn); /* Wait while conversion is active in EM1, should be almost finished since it */ /* takes 13 cycles + warmup (1us), and it was started a while ago. */ /* Disable deep sleep so we wait in EM1 for conversion to finish. */ SCB->SCR = SCB_SCR_SEVONPEND_Msk; __WFE(); /* Clear the interrupt flag */ ADC_IntClear(ADC0, ADC_IF_SINGLE); /* Clear pending IRQ */ NVIC_ClearPendingIRQ(ADC0_IRQn); /* Get ADC result */ buffer[sample_count++] = ADC_DataSingleGet(ADC0); } RTC_Enable(false); } /***************************************************************************//** * @brief * Process the sampled data through FFT. *******************************************************************************/ void ProcessFFT(void) { uint16_t *inBuf; int32_t value; int i; inBuf = lightToFFTBuffer; /* * Convert to float values. */ for (i = 0; i < BUFFER_SAMPLES; ++i) { value = (int32_t)*inBuf++; floatBuf[i] = (float32_t)value; } /* Process the data through the RFFT module, resulting complex output is * stored in fftOutputComplex */ arm_rfft_f32(&rfft_instance, floatBuf, fftOutputComplex); /* Compute the magnitude of all the resulting complex numbers */ arm_cmplx_mag_f32(fftOutputComplex, fftOutputMag, BUFFER_SAMPLES); } /***************************************************************************//** * @brief * Find the maximal bin and estimate the frequency using sinc interpolation. * @return * Frequency of maximal peak *******************************************************************************/ float32_t GetFreq(void) { float32_t maxVal; uint32_t maxIndex; /* Real and imag components of maximal bin and bins on each side */ float32_t rz_p, iz_p, rz_n, iz_n, rz_0, iz_0; /* Small correction to the "index" of the maximal bin */ float32_t deltaIndex; /* Real and imag components of the intermediate result */ float32_t a, b, c, d; #define START_INDEX 4 /* Find the biggest bin, disregarding the first bins because of DC offset and * low frequency noise. */ arm_max_f32(&fftOutputMag[START_INDEX], BUFFER_SAMPLES / 2 - START_INDEX, &maxVal, &maxIndex); maxIndex += START_INDEX; /* Perform sinc() interpolation using the two bins on each side of the * maximal bin. For more information see page 113 of * http://tmo.jpl.nasa.gov/progress_report/42-118/118I.pdf */ /* z_{peak} */ rz_0 = fftOutputComplex[maxIndex * 2]; iz_0 = fftOutputComplex[maxIndex * 2 + 1]; /* z_{peak+1} */ rz_p = fftOutputComplex[maxIndex * 2 + 2]; iz_p = fftOutputComplex[maxIndex * 2 + 2 + 1]; /* z_{peak-1} */ rz_n = fftOutputComplex[maxIndex * 2 - 2]; iz_n = fftOutputComplex[maxIndex * 2 - 2 + 1]; /* z_{peak+1} - z_{peak-1} */ a = rz_p - rz_n; b = iz_p - iz_n; /* z_{peak+1} + z_{peak-1} - 2*z_{peak} */ c = rz_p + rz_n - (float32_t)2.0 * rz_0; d = iz_p + iz_n - (float32_t)2.0 * iz_0; /* Re (z_{peak+1} - z_{peak-1}) / (z_{peak+1} + z_{peak-1} - 2*z_{peak}) */ deltaIndex = (a*c + b*d) / (c*c + d*d); return ((float32_t)maxIndex + deltaIndex) * (float32_t)SAMPLE_RATE / (float32_t)BUFFER_SAMPLES; } /***************************************************************************//** * @brief * Main function. Setup ADC, FFT, clocks, PRS, DMA, Timer, * and process FFT forever. *******************************************************************************/ int main(void) { uint32_t time; arm_status status; /* Chip errata */ CHIP_Init(); /* Enable clocks for used peripherals */ setupCMU(); /* Setup the ACMP */ setupACMP(); /* Setup the GPIO */ setupGPIO(); /* setup lesense */ setupLESENSE(); /* Enable LCD without voltage boost */ SegmentLCD_Init(false); SegmentLCD_Symbol(LCD_SYMBOL_GECKO, 1); SegmentLCD_Symbol(LCD_SYMBOL_EFM32, 1); /* Initialize the CFFT/CIFFT module */ status = arm_rfft_init_f32(&rfft_instance, &cfft_instance, BUFFER_SAMPLES, 0, /* forward transform */ 1); /* normal, not bitreversed, order */ if (status != ARM_MATH_SUCCESS) { /* Error initializing RFFT module. */ SegmentLCD_Write(" Error "); while (1) ; } /* Configure RTC to use LFXO as clock source */ RTC_Setup(cmuSelect_LFXO); /* Configure ADC */ ADC_Config(); /* Enable DWT */ CoreDebug->DEMCR |= CoreDebug_DEMCR_TRCENA_Msk; /* Make sure CYCCNT is running */ DWT->CTRL |= 1; while (1) { /* Power the light sensor with GPIO. */ GPIO_PinModeSet( EXCITE_PIN, gpioModePushPull, 1); /* Do sampling. */ doAdcSampling(lightToFFTBuffer); /* Power off the light sensor. */ GPIO_PinModeSet( EXCITE_PIN, gpioModeDisabled, 0); /* Do FFT, measure number of cpu cycles used. */ time = DWT->CYCCNT; ProcessFFT(); time = DWT->CYCCNT - time; /* Display dominant frequency. */ SegmentLCD_Number( (int)GetFreq() ); /* Display cpu cycle count used to do FFT. */ SegmentLCD_LowerNumber( (int)time ); /* Check last ADC value to determine if lightlevel is too low. */ /* Go to sleep with lesense enabled if ADC reading is below 10. */ if(lightToFFTBuffer[BUFFER_SAMPLES-1] < 10) { /* Write to LCD that lightlevel is too low. */ SegmentLCD_NumberOff(); SegmentLCD_Write("DARK"); /* Set gpio in pushpull for lesense operation. */ GPIO_PinModeSet(LIGHTSENSE_EXCITE_PORT, LIGHTSENSE_EXCITE_PIN, gpioModePushPull, 0); LESENSE->ROUTE = LESENSE_ROUTE_ALTEX0PEN; /* Start scan. */ LESENSE_ScanStart(); /* Enable deep sleep to enter EM2. */ SCB->SCR = SCB_SCR_SEVONPEND_Msk | SCB_SCR_SLEEPDEEP_Msk; /* Go to sleep while waiting for LESENSE event */ /* Since IRQ is not enabled in the NVIC, no ISR will be entered */ __WFE(); /* Clear interrupt flag */ LESENSE_IntClear(LIGHTSENSE_INTERRUPT); /* Clear pending RTC IRQ */ NVIC_ClearPendingIRQ(LESENSE_IRQn); LESENSE_ScanStop(); LESENSE->ROUTE &= ~LESENSE_ROUTE_ALTEX0PEN; } } }
Поехали
Подключаем плату в режиме DBG, программируем микроконтроллер, подключаем вход АЦП к выходу интерфейса датчиков (через него опрашивается light sensor), запускаем.
Вывод первый: программа работает корректно. Когда работает лампа дневного света, результат работы вычислений — 100 Гц (в сети переменного тока частота 50 Гц, а «максимальная интенсивность» света включенной в сеть лампы достигается и на минимуме, и на максимуме синусоиды, т.е. дважды за период). Помещая датчик освещенности в тень получаем результат «DARK», а при естественном освещении — «прыгающие» цифры.

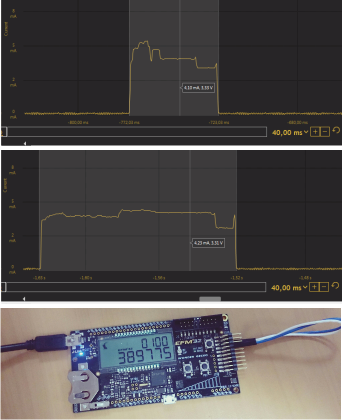
Теперь воспользуемся утилитой energy profiler, которая предоставляет график изменения уровня энергопотребления, обновляющийся по ходу исполнения программы.
Запускаем профилирование для платы EFM32WG-STK3800.
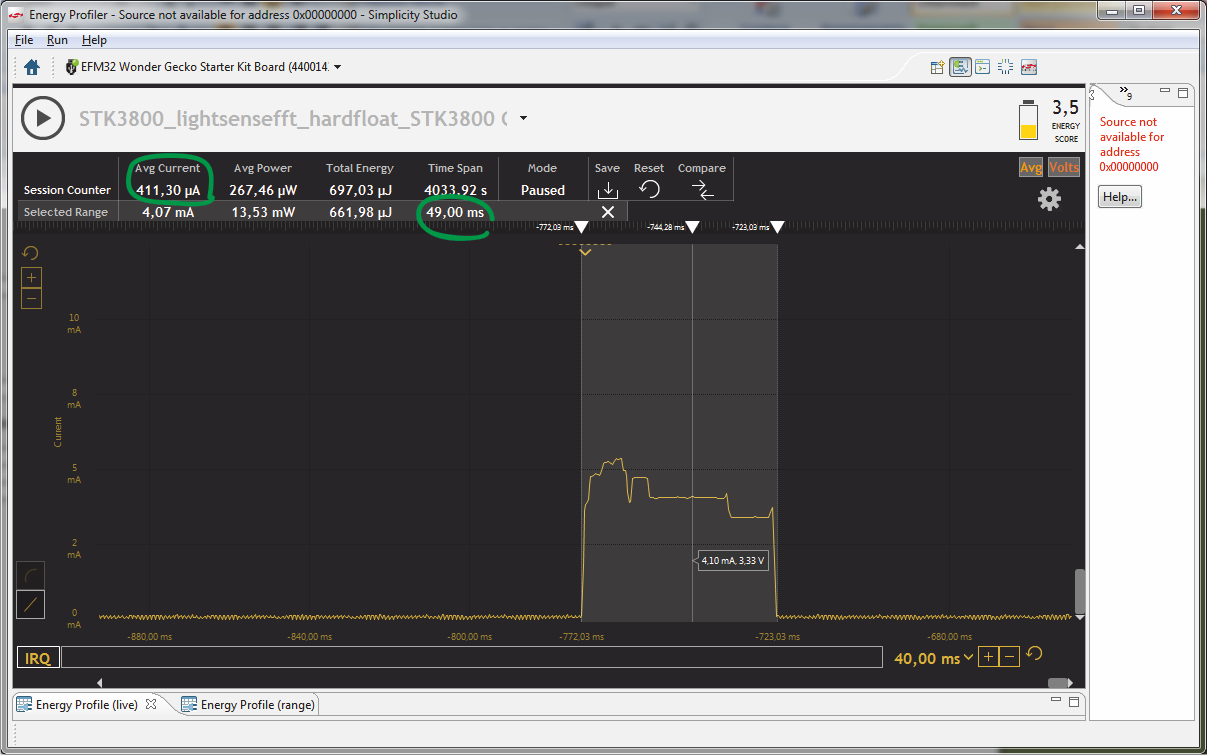
На вычисления у микроконтроллера EFM32WG990F256 ушло около 49 мс, среднее энергопотребление — 411 мкА. Запомним этот результат и попробуем запустить ту же сишную программу на модуле с микроконтроллером на базе Cortex-M3, то есть без всяких DSP- и FPU-инструкций ядра.
В свойствах проекта для этого необходимо
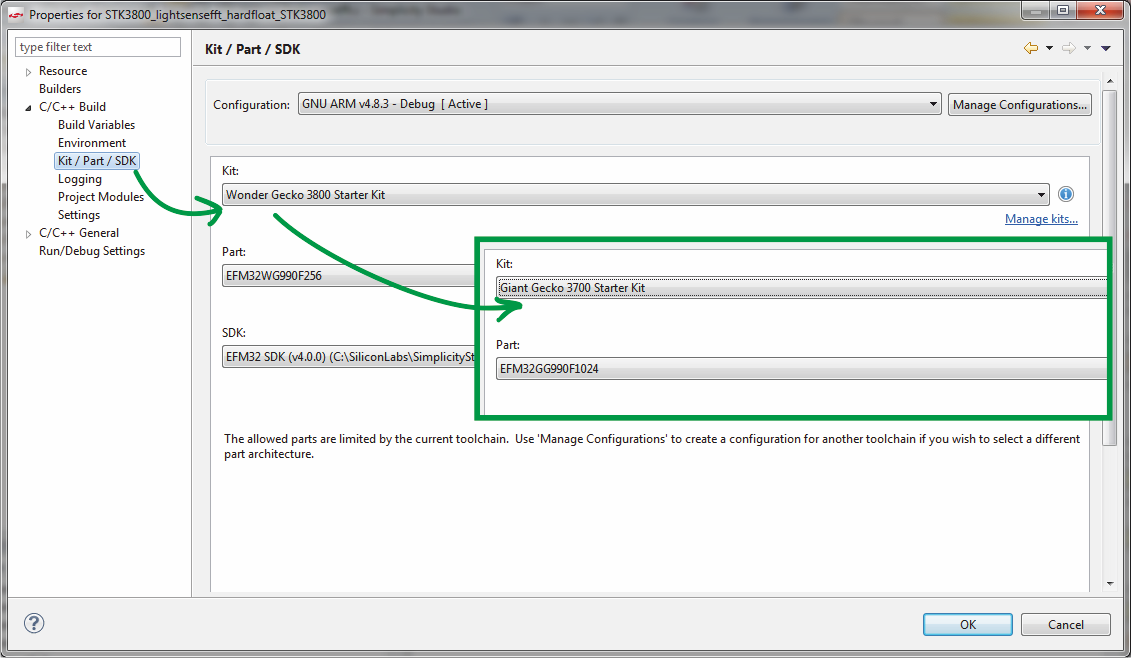
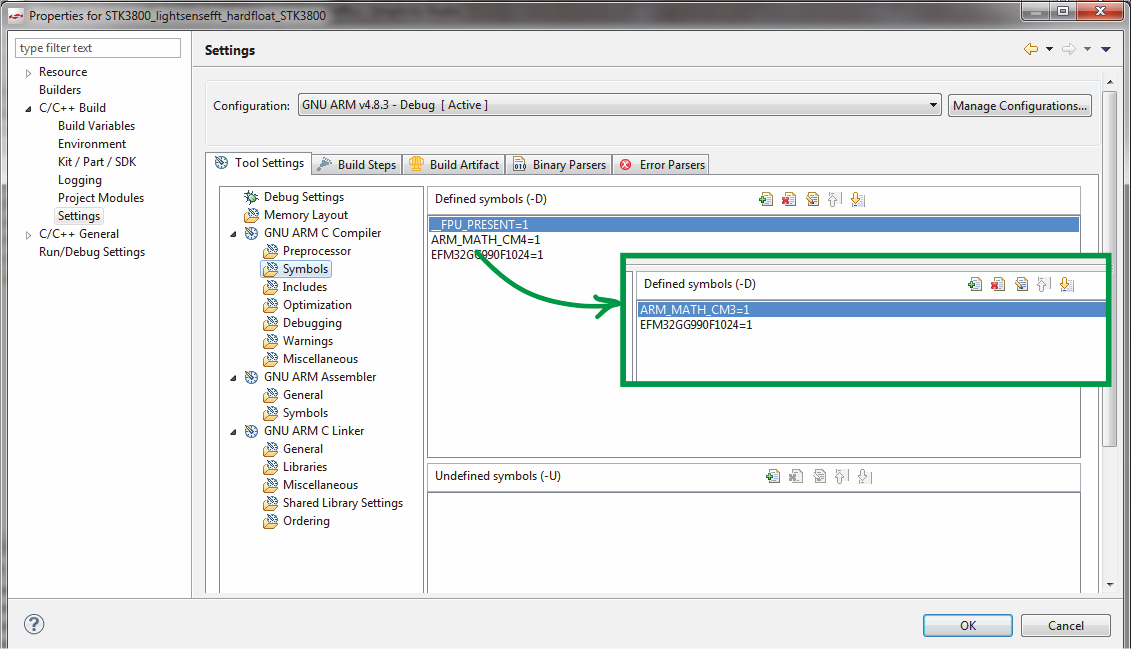
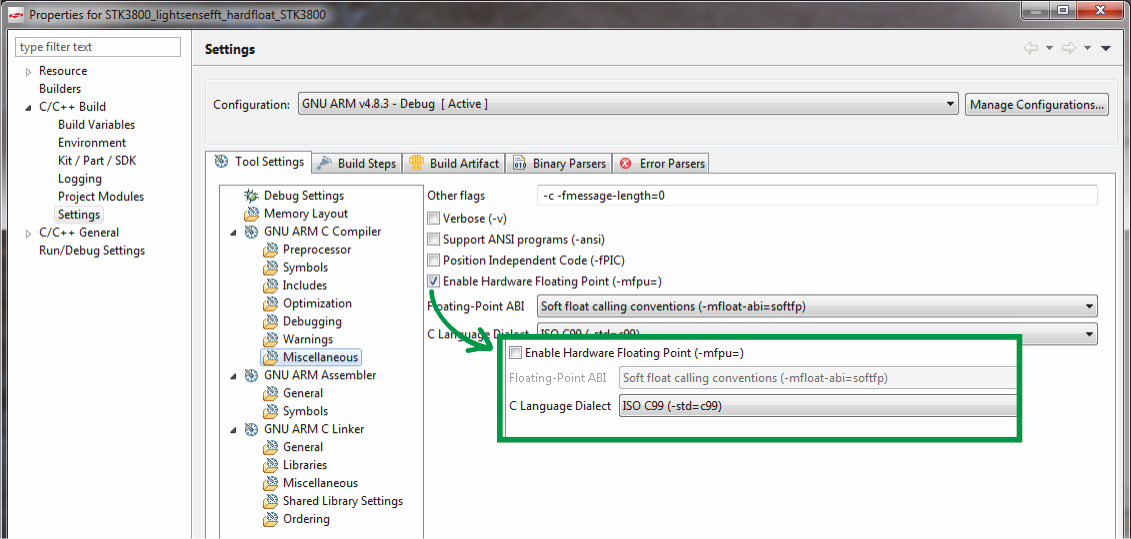
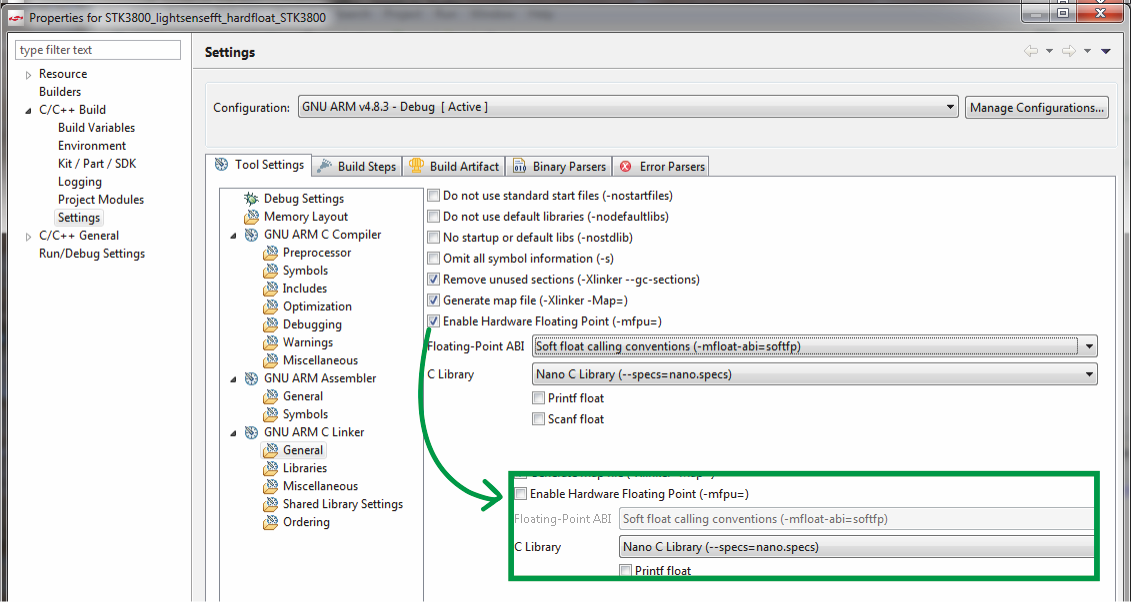
Естественно, в других IDE процесс может проходить несколько иначе, для разных серий микроконтроллеров также возможны различные нюансы, однако принцип перехода на другое ядро будет тот же.
Итак, после сохранения новых настроек и подключения другой отладочной платы повторим эксперимент.

Результаты можно сравнивать с чистой совестью: оба кристалла работают с тактовой частотой 48 МГц, опрос датчиков и обработка данных идут с одинаковой периодичностью, результаты выводятся в одном и том же формате на одинаковые ЖКИ.
По графикам видно, что энергопотребление кристалла действительно почти полностью определяется уровнем потребления на этапах вычислений и вывода их результатов. Измерения же проводятся в режиме «сна» и практически не влияют на общее энергопотребление. Вычисления на ядре Cortex-M3 проводятся в 2.2 раза медленнее, в той же пропорции изменяется и среднее энергопотребление устройства.
С одной стороны, вся математика, необходимая для решения задачи может исполняться и на контроллере с ядром Cortex-M3, однако разница в скорости вычислений может быть существенной для многих устройств, критичных к энергопотреблению или скорости работы.
На всякий случай прошу прощения за некоторые упрощения и допущения, сделанные в первой части статьи. Спасибо за внимание
ссылка на оригинал статьи https://habrahabr.ru/post/277491/
Добавить комментарий