Добрый день, уважаемые читатели Хабра!
Я продолжаю серию статей о практическом использовании ROS на Raspberry Pi (первая статья, вторая статья).
В данной статье мы будем использовать пакет teleop_twist_keyboard из стека ros-teleop для управления роботом с помощью нажатия клавиш на клавиатуре. Стек ros-teleop включает помимо данного пакета еще несколько пакетов для различных способов управления, например с помощью джойстика. Кто готов приступить к изучению teleop_twist_keyboard, прошу под кат.
Мультитерминал с tmux
Между делом, я вам хочу рассказать об одном приеме, который позволяет работать удаленно на Raspberry Pi через SSH одновременно в нескольких терминалах. Для этого на RPi нужно установить утилиту tmux.
$ sudo apt-get install tmux После этого запускаем утилиту:
$ tmux Внизу окна терминала должна появиться зеленая полоса с номером окна — 0.
tmux — это очень удобный менеджер терминальных окон, который позволяет создать в одном окне терминала любое число окон, размещая их несколькими различными способами (отдельное окно-терминал (window), панель окна (pane)) и удобно переключаться между ними.
Нажмите на клавиатуре Ctrl + B и C. Должно открыться еще одно окно с номером 1. Также попробуйте комбинацию Ctrl + B и %. Текущее окно терминала будет разделено посередине вертикальной зеленой полосой на два окна (pane). Если нажать комбинацию Ctrl + B,: и ввести “split window”, то окно будет разделено горизонтально на два одинаковых окна. Чтобы удалить панель (pane) воспользуйтесь комбинацией Ctrl + B, X и затем нажмите Y. Чтобы переключиться на другую панель в том же окне, используйте комбинацию Ctrl + B, O. Чтобы переключиться между окнами-терминалами по номеру окна, используйте комбинацию Ctrl + B, <номер окна>.
Теперь добавим запуск программы в файл ~/.bashrc для автоматического запуска при открытии нового терминала. Добавьте следующие строки в файл:
[[ $TERM != "screen" ]] && exec tmux Работа с пакетом teleop_twist_keyboard
Теперь познакомимся с пакетом teleop_twist_keyboard.
Запустим скрипт teleop_twist_keyboard.py из пакета teleop_twist_keyboard как обычный узел ROS:
$ roscore $ rosrun teleop_twist_keyboard teleop_twist_keyboard.py Мы получим вывод такого вида:
Reading from the keyboard and Publishing to Twist! --------------------------- Moving around: u i o j k l m , . q/z : increase/decrease max speeds by 10% w/x : increase/decrease only linear speed by 10% e/c : increase/decrease only angular speed by 10% anything else : stop CTRL-C to quit Выведем список всех активных на данный момент топиков:
$ rostopic list Топик /cmd_vel должен появиться в списке. На этот топик узел teleop_twist_keyboard публикует сообщения каждый раз, когда была нажата клавиша на клавиатуре.
Покажем вывод сообщений, публикуемых в топик /cmd_vel:
$ rostopic echo cmd_vel Запустим rqt_graph для представления вычислительного графа ROS в графическом виде. Схема вычислительного графа показывается все активные узлы и топики, которые их связывают.
$ rosrun rqt_graph rqt_graph 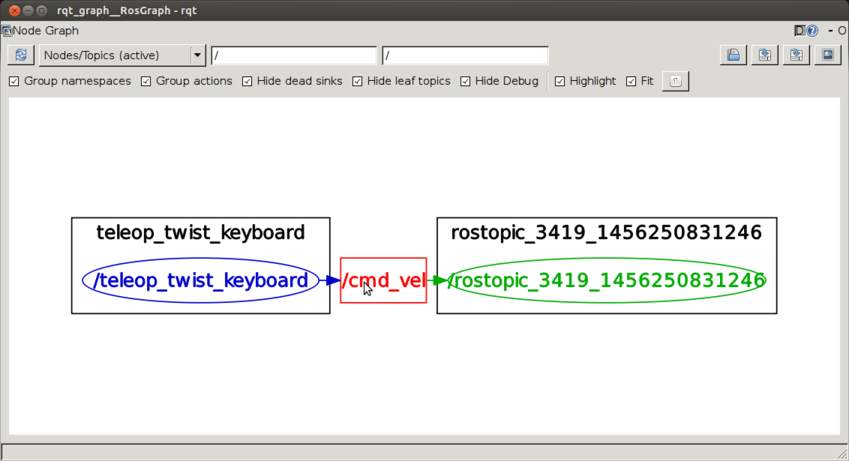
Здесь мы видим, что узел teleop_twist_keyboard публикует собщения в топик /cmd_vel, а узел rostopic подписывается на этот топик (команда rostopic echo).
Давайте узнаем какого типа сообщения публикуются на топик /cmd_vel:
$ rostopic type /cmd_vel Команда выведет строку:
geometry_msgs/Twist Это означает, что сообщения имеют тип Twist из стандартного ROS пакета geometry_msgs.
Мы также можем получить информацию о структуре сообщения командой rosmsg:
$ rosmsg info geometry_msgs/Twist geometry_msgs/Vector3 linear float64 x float64 y float64 z geometry_msgs/Vector3 angular float64 x float64 y float64 z Поле ‘linear’ отвечает за линейную скорость, ‘angular’ — за угловую скорость.
Нажмите клавишу ‘i’, вывод будет таким (ассоциируется с движением вперед):
linear: x: 0.5 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 0.0 --- Нажмите клавишу ‘k’, вывод будет таким (остановка):
linear: x: 0.0 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 0.0 --- Нажмите клавишу ‘u’, вывод будет таким (поворот влево):
linear: x: 0.5 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 1.0 --- И наконец при нажатии на клавишу ‘o’ получим такой вывод (поворачиваем вправо):
linear: x: 0.5 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: -1.0 --- Клавиши ‘j’ и ‘l’ отвечают за повороты влево и вправо на месте (без движения вперед).
Управление роботом с клавиатуры с teleop_twist_keyboard
У меня уже написан скетч rosserial для управления роботом посредством нажатия клавиш. Мы просто подписываемся на топик /cmd_vel и в зависимости от получаемого значения каждой из скоростей отдаем необходимую команду контроллеру движения (двигаться вперед, остановиться, повернуть влево или вправо). Скетч можно скачать отсюда.
Разберем подробнее код скетча.
В начале файла подключаем помимо стандартного заголовочного файла ros.h два дополнительных файла с типами сообщений geometry_msgs/Twist.h и geometry_msgs/Vector3.h:
#include <geometry_msgs/Twist.h> #include <geometry_msgs/Vector3.h> Мы объявляем обработчик узла ros::NodeHandle:
ros::NodeHandle nh; Основное значение имеет метод messageCb:
void messageCb(const geometry_msgs::Twist& message) { geometry_msgs::Vector3 linear = message.linear; float forward_vel = float(linear.x); if(forward_vel == 0) { stop(); return; } geometry_msgs::Vector3 angular = message.angular; float ang_vel = float(angular.z); if(ang_vel > 0) { turnLeft(); } else if(ang_vel < 0) { turnRight(); } else { goForward(); } } В этом методе мы производим обработку получаемого сообщения из топика cmd_vel. В переменной forward_vel мы сохраняем линейную скорость, в переменной angular — угловую. Линейная скорость нам позволяет отследить команду остановки (значение 0). Угловая скорость определяет направление поворота (если больше 0, то поворачиваем влево, меньше 0 — вправо, если 0 — двигаемся вперед).
Создаем подписчика на топик /cmd_vel:
ros::Subscriber<geometry_msgs::Twist> sub("/cmd_vel", &messageCb); со указанием ссылки на метод обработки сообщений (messageCb) и типа принимаемого сообщения — geometry_msgs::Twist.
В конце скрипта следуют стандартные методы скетча для rosserial_arduino:
nh.initNode(); nh.subscribe(sub); Serial.begin(57600); Запустите rosserial_arduino сервер:
$ rosrun rosserial_python serial_node _port:=/dev/ttyACM0 и загрузите скетч на плату Arduino.
Переключитесь на терминал, где запущен узел teleop_twist_keyboard, попробуйте нажатие клавиш ‘u’, ‘i’, ‘o’ и ‘k’ и проверьте в терминале вывод сервера rosserial.
Таким образом, используя пакет teleop_twist_keyboard мы теперь можем выполнять простое удаленное управление роботом передавая команды движения: двигаться вперед, остановиться, повернуть влево или вправо. В дальнейшем мы научимся управлять роботом с помощью джойстика, что значительно удобнее, с применением уже другого пакета в ROS. Но об этом в следующей статье.
ссылка на оригинал статьи https://geektimes.ru/post/271658/
Добавить комментарий