Инженеры из Наньянского технологического университета в своей работе продемонстрировали создание биобота из жука-бронзовки. Имплантаты и микросхема позволяют не только управлять движением насекомого, но и впервые способны изменять скорость его передвижения.
Управление скоростью осуществляется благодаря прямому подключению электродов к нервно-мышечным синапсам насекомого. В отличие от предыдущих опытов построения биоботов на основе тараканов, где электрические импульсы задавали лишь направление движения, в данном случае они влияют на степень сокращения соответствующих мышц.
Учёные сообщают, что с технической точки зрения гораздо проще сделать киборга на уже готовой, живой «платформе» из жука, чем пытаться эмулировать все его передвижения при помощи сложного устройства (хотя и такие исследования, конечно, тоже ведутся). Энергопотребление сводится к минимуму, нет необходимости в сложной системе датчиков и т.п. Из недостатков использования живых жуков учёные отмечают ограниченный температурный режим функционирования киборгов и малое время жизни.
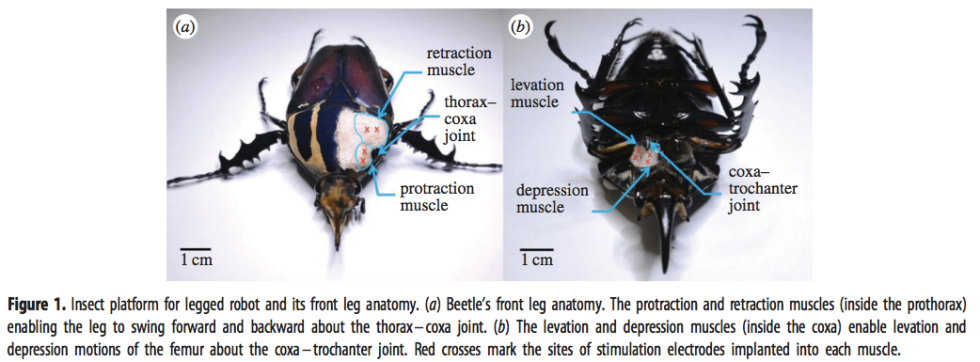
Пока что учёные подключили электроды только к передним лапкам насекомых, но и это уже дало интересные результаты. Изучая различные варианты движения жуков, учёные смогли, чередуя импульсы, даже вызывать у них разные походки, которые обычные жуки не используют.
Учёные надеются, что эти исследования помогут создавать высокоэффективных киборгов на основе насекомых, пригодных к различным задачам – от шпионажа до поиска жертв стихийных бедствий. В дальнейших планах – использование всех шести лап насекомого для ещё более полного контроля над его передвижениями.
В части создания более простых киборгов на основе насекомых уже достигнуты неплохие успехи. В 2012 году учёные продемонстрировали радиоуправляемого таракана, через пару лет компания Backyard Brains при помощи краудфандинга создала набор для всех желающих, позволяющий создать такого биобота у себя дома. А в этом году умельцы уже написали инструкцию, как сделать управляемого таракана при помощи популярного одноплатника Arduino.
ссылка на оригинал статьи https://geektimes.ru/post/273668/
Добавить комментарий