Пол года назад я наткнулся в сети вот на это видео.
Первой мыслью было то, что это очень круто и у меня такое никогда не получится повторить. Шло время, читались статьи, изучались методы и я искал примеры реализации подобного, но к моему огорчению, в сети ничего конкретного не находилось. Наткнувшись однажды на вычисления тригонометрических функций с использованием алгоритмов CORDIC, я решил попробовать создать свою собственную вращалку изображения на ПЛИС.
CORDIC
Итак, CORDIC — это аббревиатура от COordinate Rotation DIgital Computer.
Это мощный инструмент для вычисления гиперболических и тригонометрических функций. Большинство алгоритмов CORDIC работают методом последовательного приближения и не очень сложны в реализации как на языках программирования высокого уровня, так и на HDL. Я не стану заострять внимание на математике метода, читатель может ознакомиться с ним в сети или по ссылкам ниже.
В свободном доступе мне попалась вот эта реализация алгоритма CORDIC на языке verilog. Данное ядро работает в 2-х режимах: Rotate и Vector. Для наших целей подходит режим Rotate. Он позволяет вычислять значения функций sin и cos от заданного угла в радианах или градусах. Библиотеку можно сконфигурить как в конвейерном, так и в комбинационном варианте. Для наших целей подходит конвейер, у него самое большое Fmax. Он выдаст значения синуса и косинуса с задержкой в 16 тактов.
В RTL Viewer-e модуль CORDIC отображается состоящим из 16 однотипных блоков:

Еаждый из которых принимает на вход данные с предыдущего и выходами подключен ко входам следующего. Выглядит он так:
Ядро библиотеки работает только в первом квадранте, а это значит что оставшиеся три нам придётся вычислять самим вычитая pi/2 и меняя знак.
Выбранный мной подход не является очень правильным т.к. качество вращаемого изображения оставляет желать лучшего. Это происходит по причине расчета координат на-лету, без применения дополнительной буферизации данных и последовательного вычисления координат за несколько проходов, как это делается в Shear.
Первой инстанцией нашего вращателя является блок расчёта квадранта и угла поворота. Угол поворота инкрементируется каждый новый кадр на 1 градус. По достижению угла 90 градусов, квадрант меняется на следующий по очереди, а угол либо сбрасывается в ноль, либо декрементируется на 1 градус каждый новый кадр.
Выглядит это так:
always @(posedge clk) begin if (!nRst) begin cordic_angle <= 17'd0; cordic_quadrant <= 2'd0; rotator_state <= 2'd0; end else begin if (frame_changed) begin case (rotator_state) 2'd0: begin if (cordic_angle[15:8] == 8'd89) begin cordic_quadrant <= cordic_quadrant + 1'b1; rotator_state <= 2'd1; end else cordic_angle[15:8] <= cordic_angle[15:8] + 1'b1; end 2'd1: begin if (cordic_angle[15:8] == 8'd1) begin cordic_quadrant <= cordic_quadrant + 1'b1; rotator_state <= 2'd0; end else cordic_angle[15:8] <= cordic_angle[15:8] - 1'b1; end default: rotator_state <= 2'd0; endcase end end end Далее значение угла подаётся на модуль CORDIC, который и вычисляет нам значения sin и cos.
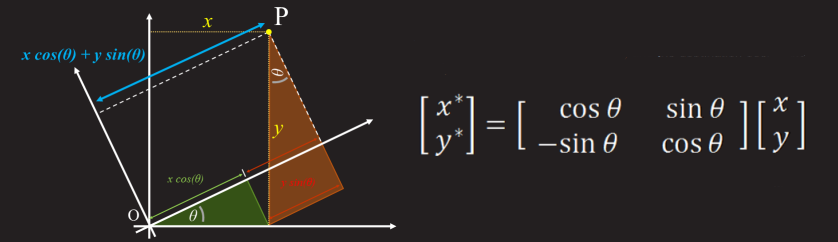
cordic CORDIC( .clk(clk), .rst(~nRst), .x_i(17'd19896), .y_i(16'd0), .theta_i(cordic_angle), .x_o(COS), .y_o(SIN), .theta_o(), .valid_in(), .valid_out() ); Далее не сложно догадаться, что расчёт координат каждого последующего пикселя будет производиться по формуле:
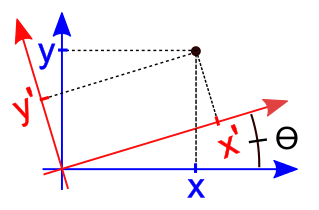
x’ = cos(angle) * x — sin(angle) * y;
y’ = sin(angle) * x + cos(angle) * y;
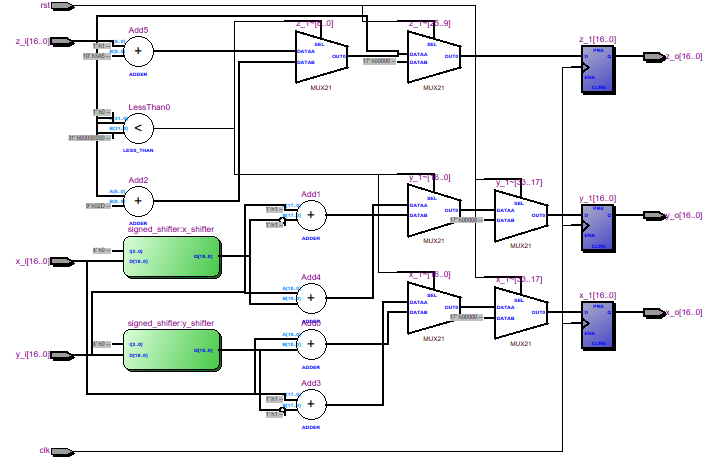
Если оставить всё в таком виде, то вращение будет с центром в начале координат. Такое вращение нас не устраивает, нам нужно чтобы картинка вращалась вокруг своей оси с центром в середине изображения. Для этого нам надо вести вычисления относительно центра изображения.
parameter PRECISION = 15; parameter OUTPUT = 12; parameter INPUT = 12; parameter OUT_SIZE = PRECISION + OUTPUT; parameter BUS_MSB = OUT_SIZE + 2; wire [15:0] res_x = RES_X - 1'b1; wire [15:0] res_y = RES_Y - 1'b1; assign dx = {1'b0, RES_X[11:1]}; assign dy = {1'b0, RES_Y[11:1]}; always @(posedge clk) begin delta_x <= dx << PRECISION; delta_y <= dy << PRECISION; еnd Далее вычисляем значения cos(angle) * x, sin(angle) * x, cos(angle) * y, sin(angle) * y.
Можно вычислять и так:
always @(posedge clk) begin mult_xcos <= (xi - dx) * COS; mult_xsin <= (xi - dx) * SIN; mult_ycos <= (yi - dy) * COS; mult_ysin <= (yi - dy) * SIN; end Но я решил использовать мегафункции lpm_mult. Их использование значительно повышает Fmax.
reg signed [BUS_MSB: 0] tmp_x, tmp_y, mult_xsin, mult_xcos, mult_ysin, mult_ycos; reg signed [BUS_MSB: 0] delta_x = 0, delta_y = 0; wire signed [11:0] dx, dy; reg signed [BUS_MSB: 0] mxsin, mxcos, mysin, mycos; reg signed [11:0] ddx, ddy; always @(posedge clk) begin ddx <= xi - dx; ddy <= yi - dy; end wire signed [BUS_MSB-1: 0] mult_xcos1; wire signed [BUS_MSB-1: 0] mult_xsin1; wire signed [BUS_MSB-1: 0] mult_ycos1; wire signed [BUS_MSB-1: 0] mult_ysin1; lpm_mult M1(.clock(clk), .dataa(COS), .datab(ddx), .result(mult_xcos1)); defparam M1.lpm_widtha = 17; defparam M1.lpm_widthb = 12; defparam M1.lpm_pipeline = 1; defparam M1.lpm_representation = "SIGNED"; lpm_mult M2(.clock(clk), .dataa(SIN), .datab(ddx), .result(mult_xsin1)); defparam M2.lpm_widtha = 17; defparam M2.lpm_widthb = 12; defparam M2.lpm_pipeline = 1; defparam M2.lpm_representation = "SIGNED"; lpm_mult M3(.clock(clk), .dataa(COS), .datab(ddy), .result(mult_ycos1)); defparam M3.lpm_widtha = 17; defparam M3.lpm_widthb = 12; defparam M3.lpm_pipeline = 1; defparam M3.lpm_representation = "SIGNED"; lpm_mult M4(.clock(clk), .dataa(SIN), .datab(ddy), .result(mult_ysin1)); defparam M4.lpm_widtha = 17; defparam M4.lpm_widthb = 12; defparam M4.lpm_pipeline = 1; defparam M4.lpm_representation = "SIGNED"; После умножения получаем произведения, знак которых нам необходимо менять в каждом следующем квадранте:
always @(posedge clk) begin mxcos <= mult_xcos1; mxsin <= mult_xsin1; mycos <= mult_ycos1; mysin <= mult_ysin1; case (cordic_quadrant) 2'd0: begin mxsin <= -mult_xsin1; end 2'd1: begin mxcos <= -mult_xcos1; mxsin <= -mult_xsin1; mycos <= -mult_ycos1; end 2'd2: begin mxcos <= -mult_xcos1; mysin <= -mult_ysin1; mycos <= -mult_ycos1; end 2'd3: begin mysin <= -mult_ysin1; end endcase end Теперь дело осталось за малым — вычислить сами координаты пикселя:
/* I II III IV + + + - - - - - + - + + + - - + */ always @(posedge clk) begin tmp_x <= delta_x + mxcos + mysin; tmp_y <= delta_y + mycos + mxsin; end wire [15:0] xo = tmp_x[BUS_MSB] ? 12'd0: tmp_x[OUT_SIZE-1:PRECISION]; wire [15:0] yo = tmp_y[BUS_MSB] ? 12'd0: tmp_y[OUT_SIZE-1:PRECISION]; Отсекаем пиксели, выходящие за границы изображения:
wire [11:0] xo_t = (xo[11:0] > res_x[11:0]) ? 12'd0 : xo[11:0]; wire [11:0] yo_t = (yo[11:0] > res_y[11:0]) ? 12'd0 : yo[11:0]; И его адрес в памяти:
//addr_out <= yo[11:0] * RES_X + xo[11:0]; И снова используем lpm_mult:
reg [11:0] xo_r, yo_r; always @(posedge clk) begin xo_r <= xo_t; yo_r <= yo_t; end wire [28:0] result; lpm_mult M5(.clock(clk), .dataa(RES_X[11:0]), .datab(yo_r[11:0]), .result(result)); defparam M5.lpm_widtha = 12; defparam M5.lpm_widthb = 12; defparam M5.lpm_pipeline = 1; defparam M5.lpm_representation = "UNSIGNED"; always @(posedge clk) addr_out <= result[22:0] + xo_r[11:0]; Вот, собственно, и всё!
Проблемы метода
Как я уже упоминал выше, данный подход имеет много недостатков. Из-за погрешности вычисления в выходной картинке появляются дыры, чем больше угол поворота, тем больше дыр. Это ещё происходит и по тому, что размеры новой картинки больше чем у оригинала. Этот эффект завётся aliasing и существуют методы борьбы с ним, например, медианный фильтр, расмотренный в моей предыдущей статье.
Перед каждым последующим кадром не мешало бы почистить память от предыдущего кадра, чтобы новое изображение получалось на чистом фоне, но это занимает время и придётся пропускать один кадр.
Единственным достоинством метода является простота реализации и скорость обработки т.к. координаты вычисляются на-лету.
Вот что из этого получилось
Ссылки по теме
CORDIC на русском
CORDIC for dummies
CORDIC FAQ
Архив проекта в Квартусе
Ссылка на яндекс диск.
ссылка на оригинал статьи https://habrahabr.ru/post/325236/
Добавить комментарий