Введение
Август, лето подходит к концу. Народ яростно рванул на моря, да оно и неудивительно — самый сезон. А на хабре, тем временем, буйным цветом распускается и пахнет лженаука. Если говорить о теме данного выпуска «Моделирования…», то в нем мы совместим приятное с полезным — продолжим обещанный цикл и совсем чуть-чуть поборемся с этой самой лженаукой за пытливые умы современной молодежи.
А вопрос ведь действительной не праздный — со школьных лет мы привыкли считать, что наш ближайший спутник в космическом пространстве — Луна движется вокруг Земли с периодом 29,5 суток, особенно не вдаваясь в сопутствующие подробности. На самом же деле наша соседка своеобразный и в какой-то степени уникальный астрономический объект, с движением которого вокруг Земли не всё так просто, как, возможно хотелось бы некоторым моим коллегам из ближайшего зарубежья.
Итак, оставив полемику в стороне, попытаемся с разных сторон, в меру своей компетенции, рассмотреть эту безусловно красивую, интересную и очень показательную задачу.
1. Закон всемирного тяготения и какие выводы мы можем из него сделать
Открытый ещё во второй половине 17 века, сэром Исааком Ньютоном, закон всемирного тяготения говорит о том, что Луна притягивается к Земле (и Земля к Луне!) с силой, направленной вдоль прямой, соединяющей центры рассматриваемых небесных тел, и равной по модулю
где m1, m2 — массы, соответственно Луны и Земли; G = 6,67e-11 — гравитационная постоянная; r1,2 — расстояние между центрами Луны и Земли. Если принимать во внимание только эту силу, то, решив задачу о движении Луны как спутника Земли и научившись рассчитывать положение Луны на небе на фоне звезд, мы довольно скоро убедимся, путем прямых измерений экваториальных координат Луны, что в нашей консерватории не всё так гладко как хотелось бы. И дело здесь не в законе всемирного тяготения (а на ранних этапах развития небесной механики такие мысли высказывались весьма нередко), а в неучтенном возмущении движения Луны со стороны других тел. Каких? Смотрим на небо и наш взгляд сразу упирается в здоровенный, массой аж 1,99e30 килограмм плазменный шар прямо у нас под носом — Солнце. Луна притягивается к Солнцу? Ещё как, с силой, равной по модулю
где m3 — масса Солнца; r1,3 — расстояние от Луны до Солнца. Сравним эту силу с предыдущей
Возьмем положение тел, в котором притяжение Луны к Солнцу будет минимальным: все три тела на одной прямой и Земля располагается между Луной и Солнцем. В этом случае наша формула примет вид:
где , м — среднее расстояние от Земли до Луны; , м — среднее расстояние от Земли до Солнца. Подставим в эту формулу реальные параметры
Вот это номер! Получается Луна притягивается к Солнцу силой, более чем в два раза превышающей силу её притяжения к Земле.
Подобное возмущение уже нельзя не учитывать и оно определенно повлияет на конечную траекторию движения Луны. Пойдем дальше, принимая во внимание допущение о том, что орбита Земли круговая с радиусом a, найдем геометрическое место точек вокруг Земли, где сила притяжения любого объекта к Земле равна силе его притяжения к Солнцу. Это будет сфера, с радиусом
смещенная вдоль прямой, соединяющей Землю и Солнце в сторону противоположенную направлению на Солнце на расстояние
где — отношение массы Земли к массе Солнца. Подставив численные значения параметров получим фактические размеры данной области: R = 259300 километров, и l = 450 километров. Эта сфера носит название сферы тяготения Земли относительно Солнца.
Известная нам орбита Луны лежит вне этой области. То есть в любой точке траектории Луна испытывает со стороны Солнца существенно большее притяжение, чем со стороны Земли.
2. Спутник или планета? Гравитационная сфера действия
Эта информация, часто порождает споры, о том, что Луна не спутник Земли, а самостоятельная планета Солнечной системы, орбита которой возмущена притяжением близкой Земли.
Оценим возмущение, вносимое Солнцем в траекторию Луны относительно Земли, а так же возмущение, вносимое Землей в траекторию Луны относительно Солнца, воспользовавшись критерием, предложенным П. Лапласом. Рассмотрим три тела: Солнце (S), Землю (E) и Луну (M).
Примем допущение, что орбиты Земли относительно Солнца и Луны относительно Земли являются круговыми.
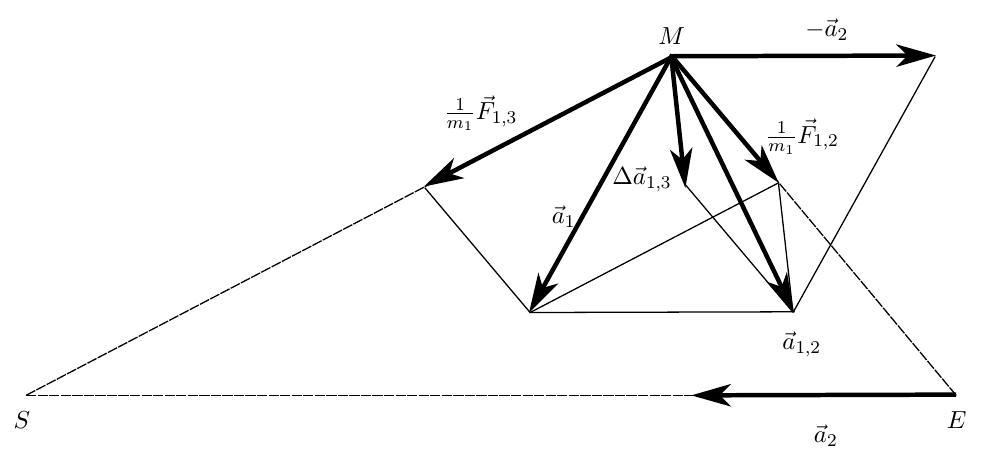
Рассмотрим движение Луны в геоцентрической инерциальной системе отсчета. Абсолютное ускорение Луны в гелиоцентрической системе отсчета определяется действующими на неё силами тяготения и равно:
С другой стороны, в соответствии с теоремой Кориолиса, абсолютное ускорение Луны
где — переносное ускорение, равное ускорению Земли относительно Солнца; — ускорение Луны относительно Земли. Ускорения Кориолиса здесь не будет — выбранная нами система координат движется поступательно. Отсюда получаем ускорение Луны относительно Земли
Часть этого ускорения, равная обусловлена притяжением Луны к Земле и характеризует её невозмущенное геоцентрическое движение. Оставшаяся часть
ускорение Луны, вызванное возмущением со стороны Солнца.
Если рассматривать движение Луны в гелиоцентрической инерциальной системе отсчета, то всё намного проще, ускорение характеризует невозмущенное гелиоцентрическое движение Луны, а ускорение — возмущение этого движения со стороны Земли.
При существующих в текущую эпоху параметрах орбит Земли и Луны, в каждой точке траектории Луны справедливо неравенство
что можно проверить и непосредственным вычислением, но я сошлюсь на источник, дабы излишне не загромождать статью.
Что означает неравенство (1)? Да то, что в относительном выражении эффект от возмущения Луны Солнцем (причем очень существенно) меньше эффекта от притяжения Луны к Земле. И наоборот, возмущение Землей геолиоцентрической траектории Луны оказывает решающее влияние на характер её движения. Влияние земной гравитации в данном случае более существенно, а значит Луна «принадлежит» Земле по праву и является её спутником.
Интересным является другое — превратив неравенство (1) в уравнение можно найти геометрическое место точек, где эффекты возмущения Луны (да и любого другого тела) Землей и Солнцем одинаковы. К сожалению это у же не так просто, как в случае со сферой тяготения. Расчеты показывают, что данная поверхность описывается уравнением сумасшедшего порядка, но близка к эллипсоиду вращения. Всё что мы может сделать без лишних заморочек, это оценить общие габариты этой поверхности относительно центра Земли. Решая численно уравнение
относительно расстояния от центра Земли до искомой поверхности на достаточном количестве точек, получаем сечение искомой поверхности плоскостью эклиптики
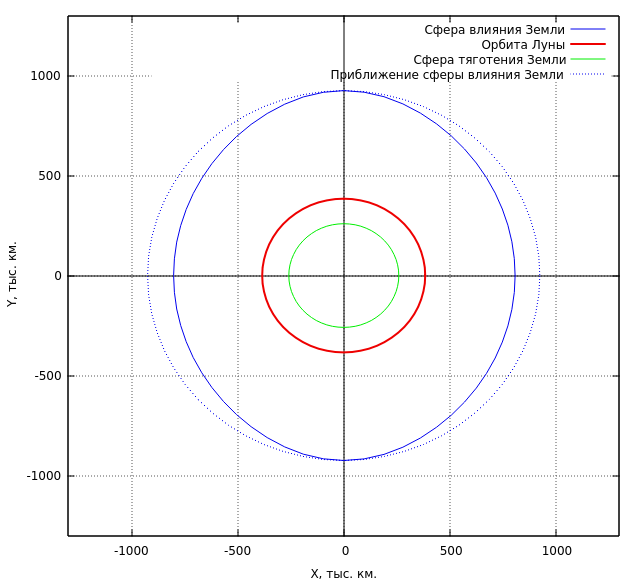
Для наглядности здесь показаны и геоцентрическая орбита Луны и, найденная нами выше сфера тяготения Земли относительно Солнца. Из рисунка видно, что сфера влияния, или сфера гравитационного действия Земли относительно Солнца есть поверхность вращения относительно оси X, сплющенная вдоль прямой, соединяющей Землю и Солнце (вдоль оси затмений). Орбита Луны находится глубоко внутри этой воображаемой поверхности.
Для практических расчетов данную поверхность удобно аппроксимировать сферой с центром в центра Земли и радиусом равным
где m — масса меньшего небесного тела; M — масса большего тела, в поле тяготения которого движется меньшее тело; a — расстояние между центрами тел. В нашем случае
Вот этот недоделанный миллион километров и есть тот теоретический предел, за который власть старушки Земли не распространяется — её влияние на траектории астрономических объектов настолько мало, что им можно пренебречь. А значит, запустить Луну по круговой орбите на расстоянии 38,4 млн. километров от Земли (как делают некоторые лингвисты) не получится, это физически невозможно.
Эта сфера, для сравнения, показана на рисунке синей пунктирной линией. При оценочных расчетах принято считать, что тело, находящееся внутри данной сферы будет испытывать тяготение исключительно со стороны Земли. Если тело находится снаружи данной сферы — считаем что тело движется в поле тяготения Солнца. В практической космонавтике известен метод сопряжения конических сечений, позволяющий приближенно рассчитать траекторию космического аппарата, используя решение задачи двух тел. При этом всё пространство, которое преодолевает аппарат разбивается на подобные сферы влияния.
Например, теперь понятно, для того чтобы иметь теоретическую возможность совершить маневры для выхода на окололунную орбиту, космический аппарат должен попасть внутрь сферы действия Луны относительно Земли. Её радиус легко рассчитать по формуле (3) и он равен 66 тысяч километров.
Таким образом, Луна справедливо может считаться спутником Земли. Однако, ввиду существенно влияния гравитационного поля Солнца она движется не в центральном гравитационном поле, а значит её траектория не является коническим сечением.
3. Задача трех тел в классической постановке
Итак, рассмотрим модельную задачу в общей постановке, известную в небесной механике как задача трех тел. Рассмотрим три тела произвольной массы, расположенных произвольным образом в пространстве и движущихся исключительно под действием сил взаимного гравитационного притяжения
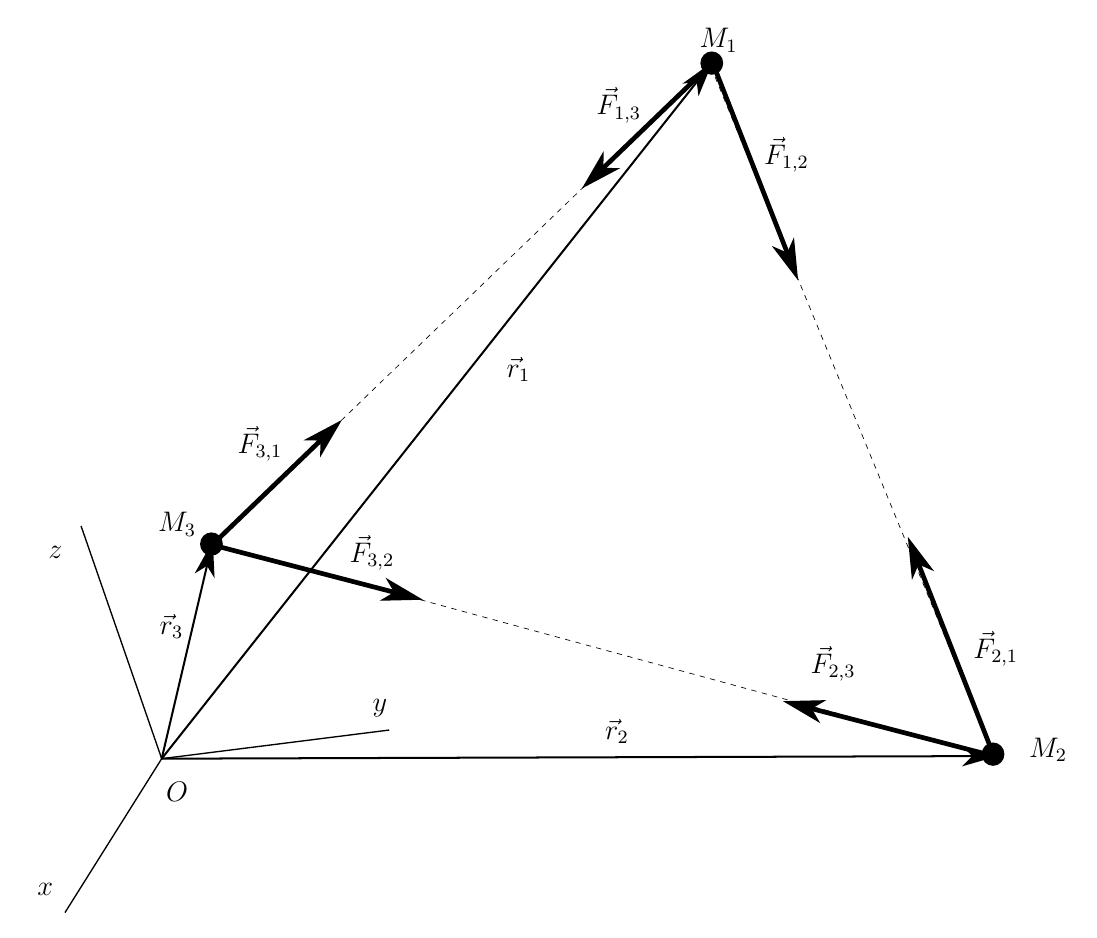
Тела считаем материальными точками. Положение тел будем отсчитывать в произвольном базисе, с которым связана инерциальная система отсчета Oxyz. Положение каждого из тел задается радиус-вектором соответственно , и . На каждое тело действует сила гравитационного притяжения со стороны двух других тел, причем в соответствии с третьей аксиомой динамики точки (3-й закон Ньютона)
Запишем дифференциальные уравнения движения каждой точки в векторной форме
или, с учетом (4)
В соответствии с законом всемирного тяготения, силы взаимодействия направлены вдоль векторов
Вдоль каждого из этих векторов выпустим соответствующий орт
тогда каждая из гравитационных сил рассчитывается по формуле
С учетом всего этого система уравнений движения принимает вид
Введем обозначение, принятое в небесной механике
— гравитационный параметр притягивающего центра. Тогда уравнения движения примут окончательный векторный вид
4. Нормирование уравнений к безразмерным переменным
Довольно популярным приемом при математическом моделировании является приведение дифференциальных уравнений и прочих соотношений, описывающих процесс, к безразмерным фазовым координатам и безразмерному времени. Нормируются так же и другие параметры. Это позволяет рассматривать, хоть и с применением численного моделирования, но в достаточно общем виде целый класс типовых задач. Вопрос о том, насколько это оправдано в каждой решаемой задаче оставляю открытым, но соглашусь, что в данном случае такой подход вполне справедлив.
Итак, введем некое абстрактное небесное тело с гравитационным параметром , такое, что период обращения спутника по эллиптической орбите с большой полуосью вокруг него равен . Все эти величины, в силу законов механики, связаны соотношением
Введем замену параметров. Для положения точек нашей системы
где — безразмерный радиус-вектор i-й точки;
для гравитационных параметров тел
где — безразмерный гравитационный параметр i-й точки;
для времени
где — безразмерное время.
Теперь пересчитаем ускорения точек системы через эти безразмерные параметры. Применим прямое двукратное дифференцирование по времени. Для скоростей
Для ускорений
При подстановке полученных соотношений в уравнения движения всё элегантно схлопывается в красивые уравнения:
Данная система уравнений до сих пор считается не интегрируемой в аналитических функциях. Почему считается а не является? Потому что успехи теории функции комплексного переменного привели к тому, что общее решение задачи трех тел таки появилось в 1912 году — Карлом Зундманом был найден алгоритм отыскания коэффициентов для бесконечных рядов относительно комплексного параметра, теоретически являющихся общим решением задачи трех тел. Но… для применения рядов Зундмана в практических расчетах с требуемой для них точностью требует получения такого числа членов этих рядов, что эта задача во много превосходит возможности вычислительных машин даже на сегодняшний день.
Поэтому численное интегрирование — единственный способ анализа решения уравнения (5)
5. Расчет начальных условий: добываем исходные данные
Как я уже писал ранее, прежде чем начинать численное интегрирование, следует озаботится расчетом начальных условий для решаемой задачи. В рассматриваемой задаче поиск начальных условий превращается в самостоятельную подзадачу, так как система (5) дает нам девять скалярных уравнений второго порядка, что при переходе к нормальной форме Коши повышает порядок системы ещё в 2 раза. То есть нам необходимо рассчитать целых 18 параметров — начальные положения и компоненты начальной скорости всех точек системы. Где мы возьмем данные о положении интересующих нас небесных тел? Мы живем в мире, где человек ходил по Луне — естественно человечество должно обладать информацией, как эта самая Луна движется и где она находится.
То есть, скажете вы, ты, чувак, предлагаешь нам взять с полок толстые астрономические справочники, сдуть с них пыль… Не угадали! Я предлагаю сходить за этими данными к тем, кто собственно ходил по Луне, к NASA, а именно в Лабораторию реактивного движения, Пасадена, штат Калифорния. Вот сюда — JPL Horizonts web interface.
Здесь, потратив немного времени на изучение интерфейса, мы добудем все необходимые нам данные. Выберем дату, например, да нам всё равно, но пусть это будет 27 июля 2018 года UT 20:21. Как раз в этот момент наблюдалась полная фаза лунного затмения. Программа выдаст нам огромную портянку
*******************************************************************************
Revised: Jul 31, 2013 Moon / (Earth) 301
GEOPHYSICAL DATA (updated 2018-Aug-13):
Vol. Mean Radius, km = 1737.53+-0.03 Mass, x10^22 kg = 7.349
Radius (gravity), km = 1738.0 Surface emissivity = 0.92
Radius (IAU), km = 1737.4 GM, km^3/s^2 = 4902.800066
Density, g/cm^3 = 3.3437 GM 1-sigma, km^3/s^2 = +-0.0001
V(1,0) = +0.21 Surface accel., m/s^2 = 1.62
Earth/Moon mass ratio = 81.3005690769 Farside crust. thick. = ~80 - 90 km
Mean crustal density = 2.97+-.07 g/cm^3 Nearside crust. thick.= 58+-8 km
Heat flow, Apollo 15 = 3.1+-.6 mW/m^2 k2 = 0.024059
Heat flow, Apollo 17 = 2.2+-.5 mW/m^2 Rot. Rate, rad/s = 0.0000026617
Geometric Albedo = 0.12
Mean angular diameter = 31'05.2" Orbit period = 27.321582 d
Obliquity to orbit = 6.67 deg Eccentricity = 0.05490
Semi-major axis, a = 384400 km Inclination = 5.145 deg
Mean motion, rad/s = 2.6616995x10^-6 Nodal period = 6798.38 d
Apsidal period = 3231.50 d Mom. of inertia C/MR^2= 0.393142
beta (C-A/B), x10^-4 = 6.310213 gamma (B-A/C), x10^-4 = 2.277317
Perihelion Aphelion Mean
Solar Constant (W/m^2) 1414+-7 1323+-7 1368+-7
Maximum Planetary IR (W/m^2) 1314 1226 1268
Minimum Planetary IR (W/m^2) 5.2 5.2 5.2
*******************************************************************************
*******************************************************************************
Ephemeris / WWW_USER Wed Aug 15 20:45:05 2018 Pasadena, USA / Horizons
*******************************************************************************
Target body name: Moon (301) {source: DE431mx}
Center body name: Earth (399) {source: DE431mx}
Center-site name: BODY CENTER
*******************************************************************************
Start time : A.D. 2018-Jul-27 20:21:00.0003 TDB
Stop time : A.D. 2018-Jul-28 20:21:00.0003 TDB
Step-size : 0 steps
*******************************************************************************
Center geodetic : 0.00000000,0.00000000,0.0000000 {E-lon(deg),Lat(deg),Alt(km)}
Center cylindric: 0.00000000,0.00000000,0.0000000 {E-lon(deg),Dxy(km),Dz(km)}
Center radii : 6378.1 x 6378.1 x 6356.8 km {Equator, meridian, pole}
Output units : AU-D
Output type : GEOMETRIC cartesian states
Output format : 3 (position, velocity, LT, range, range-rate)
Reference frame : ICRF/J2000.0
Coordinate systm: Ecliptic and Mean Equinox of Reference Epoch
*******************************************************************************
JDTDB
X Y Z
VX VY VZ
LT RG RR
*******************************************************************************
$$SOE
2458327.347916670 = A.D. 2018-Jul-27 20:21:00.0003 TDB
X = 1.537109094089627E-03 Y =-2.237488447258137E-03 Z = 5.112037386426180E-06
VX= 4.593816208618667E-04 VY= 3.187527302531735E-04 VZ=-5.183707711777675E-05
LT= 1.567825598846416E-05 RG= 2.714605874095336E-03 RR=-2.707898607099066E-06
$$EOE
*******************************************************************************
Coordinate system description:
Ecliptic and Mean Equinox of Reference Epoch
Reference epoch: J2000.0
XY-plane: plane of the Earth's orbit at the reference epoch
Note: obliquity of 84381.448 arcseconds wrt ICRF equator (IAU76)
X-axis : out along ascending node of instantaneous plane of the Earth's
orbit and the Earth's mean equator at the reference epoch
Z-axis : perpendicular to the xy-plane in the directional (+ or -) sense
of Earth's north pole at the reference epoch.
Symbol meaning [1 au= 149597870.700 km, 1 day= 86400.0 s]:
JDTDB Julian Day Number, Barycentric Dynamical Time
X X-component of position vector (au)
Y Y-component of position vector (au)
Z Z-component of position vector (au)
VX X-component of velocity vector (au/day)
VY Y-component of velocity vector (au/day)
VZ Z-component of velocity vector (au/day)
LT One-way down-leg Newtonian light-time (day)
RG Range; distance from coordinate center (au)
RR Range-rate; radial velocity wrt coord. center (au/day)
Geometric states/elements have no aberrations applied.
Computations by ...
Solar System Dynamics Group, Horizons On-Line Ephemeris System
4800 Oak Grove Drive, Jet Propulsion Laboratory
Pasadena, CA 91109 USA
Information: http://ssd.jpl.nasa.gov/
Connect : telnet://ssd.jpl.nasa.gov:6775 (via browser)
http://ssd.jpl.nasa.gov/?horizons
telnet ssd.jpl.nasa.gov 6775 (via command-line)
Author : Jon.D.Giorgini@jpl.nasa.gov
*******************************************************************************
Бр-р-р, что это? Без паники, для того, кто хорошо учил в школе астрономию, механику и математику тут боятся нечего. Итак, самое главное конечное искомые координаты и компоненты скорости Луны
$$SOE
2458327.347916670 = A.D. 2018-Jul-27 20:21:00.0003 TDB
X = 1.537109094089627E-03 Y =-2.237488447258137E-03 Z = 5.112037386426180E-06
VX= 4.593816208618667E-04 VY= 3.187527302531735E-04 VZ=-5.183707711777675E-05
LT= 1.567825598846416E-05 RG= 2.714605874095336E-03 RR=-2.707898607099066E-06
$$EOE
Да-да-да, они декартовы! Если внимательно прочесть всю портянку, то мы узнаем, что начало этой системы координат совпадает с центром Земли. Плоскость XY лежит в плоскости земной орбиты (плоскости эклиптики) на эпоху J2000. Ось X направлена вдоль линии пересечения плоскости экватора Земли и эклиптики в точку весеннего равноденствия. Ось Z смотрит в направлении северного полюса Земли перпендикулярно плоскости эклиптики. Ну а ось Y дополняет всё это счастье до правой тройки векторов. По-умолчанию единицы измерения координат: астрономические единицы (умнички из NASA приводят и величину автрономической единицы в километрах). Единицы измерения скорости: астрономические единицы в день, день принимается равным 86400 секундам. Полный фарш!
Аналогичную информацию мы можем получить и для Земли
*******************************************************************************
Revised: Jul 31, 2013 Earth 399
GEOPHYSICAL PROPERTIES (revised Aug 13, 2018):
Vol. Mean Radius (km) = 6371.01+-0.02 Mass x10^24 (kg)= 5.97219+-0.0006
Equ. radius, km = 6378.137 Mass layers:
Polar axis, km = 6356.752 Atmos = 5.1 x 10^18 kg
Flattening = 1/298.257223563 oceans = 1.4 x 10^21 kg
Density, g/cm^3 = 5.51 crust = 2.6 x 10^22 kg
J2 (IERS 2010) = 0.00108262545 mantle = 4.043 x 10^24 kg
g_p, m/s^2 (polar) = 9.8321863685 outer core = 1.835 x 10^24 kg
g_e, m/s^2 (equatorial) = 9.7803267715 inner core = 9.675 x 10^22 kg
g_o, m/s^2 = 9.82022 Fluid core rad = 3480 km
GM, km^3/s^2 = 398600.435436 Inner core rad = 1215 km
GM 1-sigma, km^3/s^2 = 0.0014 Escape velocity = 11.186 km/s
Rot. Rate (rad/s) = 0.00007292115 Surface Area:
Mean sidereal day, hr = 23.9344695944 land = 1.48 x 10^8 km
Mean solar day 2000.0, s = 86400.002 sea = 3.62 x 10^8 km
Mean solar day 1820.0, s = 86400.0
Moment of inertia = 0.3308 Love no., k2 = 0.299
Mean Temperature, K = 270 Atm. pressure = 1.0 bar
Vis. mag. V(1,0) = -3.86 Volume, km^3 = 1.08321 x 10^12
Geometric Albedo = 0.367 Magnetic moment = 0.61 gauss Rp^3
Solar Constant (W/m^2) = 1367.6 (mean), 1414 (perihelion), 1322 (aphelion)
ORBIT CHARACTERISTICS:
Obliquity to orbit, deg = 23.4392911 Sidereal orb period = 1.0000174 y
Orbital speed, km/s = 29.79 Sidereal orb period = 365.25636 d
Mean daily motion, deg/d = 0.9856474 Hill's sphere radius = 234.9
*******************************************************************************
*******************************************************************************
Ephemeris / WWW_USER Wed Aug 15 21:16:21 2018 Pasadena, USA / Horizons
*******************************************************************************
Target body name: Earth (399) {source: DE431mx}
Center body name: Solar System Barycenter (0) {source: DE431mx}
Center-site name: BODY CENTER
*******************************************************************************
Start time : A.D. 2018-Jul-27 20:21:00.0003 TDB
Stop time : A.D. 2018-Jul-28 20:21:00.0003 TDB
Step-size : 0 steps
*******************************************************************************
Center geodetic : 0.00000000,0.00000000,0.0000000 {E-lon(deg),Lat(deg),Alt(km)}
Center cylindric: 0.00000000,0.00000000,0.0000000 {E-lon(deg),Dxy(km),Dz(km)}
Center radii : (undefined)
Output units : AU-D
Output type : GEOMETRIC cartesian states
Output format : 3 (position, velocity, LT, range, range-rate)
Reference frame : ICRF/J2000.0
Coordinate systm: Ecliptic and Mean Equinox of Reference Epoch
*******************************************************************************
JDTDB
X Y Z
VX VY VZ
LT RG RR
*******************************************************************************
$$SOE
2458327.347916670 = A.D. 2018-Jul-27 20:21:00.0003 TDB
X = 5.755663665315949E-01 Y =-8.298818915224488E-01 Z =-5.366994499016168E-05
VX= 1.388633512282171E-02 VY= 9.678934168415631E-03 VZ= 3.429889230737491E-07
LT= 5.832932117417083E-03 RG= 1.009940888883960E+00 RR=-3.947237246302148E-05
$$EOE
*******************************************************************************
Coordinate system description:
Ecliptic and Mean Equinox of Reference Epoch
Reference epoch: J2000.0
XY-plane: plane of the Earth's orbit at the reference epoch
Note: obliquity of 84381.448 arcseconds wrt ICRF equator (IAU76)
X-axis : out along ascending node of instantaneous plane of the Earth's
orbit and the Earth's mean equator at the reference epoch
Z-axis : perpendicular to the xy-plane in the directional (+ or -) sense
of Earth's north pole at the reference epoch.
Symbol meaning [1 au= 149597870.700 km, 1 day= 86400.0 s]:
JDTDB Julian Day Number, Barycentric Dynamical Time
X X-component of position vector (au)
Y Y-component of position vector (au)
Z Z-component of position vector (au)
VX X-component of velocity vector (au/day)
VY Y-component of velocity vector (au/day)
VZ Z-component of velocity vector (au/day)
LT One-way down-leg Newtonian light-time (day)
RG Range; distance from coordinate center (au)
RR Range-rate; radial velocity wrt coord. center (au/day)
Geometric states/elements have no aberrations applied.
Computations by ...
Solar System Dynamics Group, Horizons On-Line Ephemeris System
4800 Oak Grove Drive, Jet Propulsion Laboratory
Pasadena, CA 91109 USA
Information: http://ssd.jpl.nasa.gov/
Connect : telnet://ssd.jpl.nasa.gov:6775 (via browser)
http://ssd.jpl.nasa.gov/?horizons
telnet ssd.jpl.nasa.gov 6775 (via command-line)
Author : Jon.D.Giorgini@jpl.nasa.gov
*******************************************************************************
Здесь в качестве начала координат выбран барицентр (центр масс) Солнечной системы. Интересующие нас данные
$$SOE
2458327.347916670 = A.D. 2018-Jul-27 20:21:00.0003 TDB
X = 5.755663665315949E-01 Y =-8.298818915224488E-01 Z =-5.366994499016168E-05
VX= 1.388633512282171E-02 VY= 9.678934168415631E-03 VZ= 3.429889230737491E-07
LT= 5.832932117417083E-03 RG= 1.009940888883960E+00 RR=-3.947237246302148E-05
$$EOE
Для Луны нам понадобятся координаты и скорость относительно барицентра Солнечной системы, мы можем их посчитать, а можем попросит NASA дать нам такие данные
*******************************************************************************
Revised: Jul 31, 2013 Moon / (Earth) 301
GEOPHYSICAL DATA (updated 2018-Aug-13):
Vol. Mean Radius, km = 1737.53+-0.03 Mass, x10^22 kg = 7.349
Radius (gravity), km = 1738.0 Surface emissivity = 0.92
Radius (IAU), km = 1737.4 GM, km^3/s^2 = 4902.800066
Density, g/cm^3 = 3.3437 GM 1-sigma, km^3/s^2 = +-0.0001
V(1,0) = +0.21 Surface accel., m/s^2 = 1.62
Earth/Moon mass ratio = 81.3005690769 Farside crust. thick. = ~80 - 90 km
Mean crustal density = 2.97+-.07 g/cm^3 Nearside crust. thick.= 58+-8 km
Heat flow, Apollo 15 = 3.1+-.6 mW/m^2 k2 = 0.024059
Heat flow, Apollo 17 = 2.2+-.5 mW/m^2 Rot. Rate, rad/s = 0.0000026617
Geometric Albedo = 0.12
Mean angular diameter = 31'05.2" Orbit period = 27.321582 d
Obliquity to orbit = 6.67 deg Eccentricity = 0.05490
Semi-major axis, a = 384400 km Inclination = 5.145 deg
Mean motion, rad/s = 2.6616995x10^-6 Nodal period = 6798.38 d
Apsidal period = 3231.50 d Mom. of inertia C/MR^2= 0.393142
beta (C-A/B), x10^-4 = 6.310213 gamma (B-A/C), x10^-4 = 2.277317
Perihelion Aphelion Mean
Solar Constant (W/m^2) 1414+-7 1323+-7 1368+-7
Maximum Planetary IR (W/m^2) 1314 1226 1268
Minimum Planetary IR (W/m^2) 5.2 5.2 5.2
*******************************************************************************
*******************************************************************************
Ephemeris / WWW_USER Wed Aug 15 21:19:24 2018 Pasadena, USA / Horizons
*******************************************************************************
Target body name: Moon (301) {source: DE431mx}
Center body name: Solar System Barycenter (0) {source: DE431mx}
Center-site name: BODY CENTER
*******************************************************************************
Start time : A.D. 2018-Jul-27 20:21:00.0003 TDB
Stop time : A.D. 2018-Jul-28 20:21:00.0003 TDB
Step-size : 0 steps
*******************************************************************************
Center geodetic : 0.00000000,0.00000000,0.0000000 {E-lon(deg),Lat(deg),Alt(km)}
Center cylindric: 0.00000000,0.00000000,0.0000000 {E-lon(deg),Dxy(km),Dz(km)}
Center radii : (undefined)
Output units : AU-D
Output type : GEOMETRIC cartesian states
Output format : 3 (position, velocity, LT, range, range-rate)
Reference frame : ICRF/J2000.0
Coordinate systm: Ecliptic and Mean Equinox of Reference Epoch
*******************************************************************************
JDTDB
X Y Z
VX VY VZ
LT RG RR
*******************************************************************************
$$SOE
2458327.347916670 = A.D. 2018-Jul-27 20:21:00.0003 TDB
X = 5.771034756256845E-01 Y =-8.321193799697072E-01 Z =-4.855790760378579E-05
VX= 1.434571674368357E-02 VY= 9.997686898668805E-03 VZ=-5.149408819470315E-05
LT= 5.848610189172283E-03 RG= 1.012655462859054E+00 RR=-3.979984423450087E-05
$$EOE
*******************************************************************************
Coordinate system description:
Ecliptic and Mean Equinox of Reference Epoch
Reference epoch: J2000.0
XY-plane: plane of the Earth's orbit at the reference epoch
Note: obliquity of 84381.448 arcseconds wrt ICRF equator (IAU76)
X-axis : out along ascending node of instantaneous plane of the Earth's
orbit and the Earth's mean equator at the reference epoch
Z-axis : perpendicular to the xy-plane in the directional (+ or -) sense
of Earth's north pole at the reference epoch.
Symbol meaning [1 au= 149597870.700 km, 1 day= 86400.0 s]:
JDTDB Julian Day Number, Barycentric Dynamical Time
X X-component of position vector (au)
Y Y-component of position vector (au)
Z Z-component of position vector (au)
VX X-component of velocity vector (au/day)
VY Y-component of velocity vector (au/day)
VZ Z-component of velocity vector (au/day)
LT One-way down-leg Newtonian light-time (day)
RG Range; distance from coordinate center (au)
RR Range-rate; radial velocity wrt coord. center (au/day)
Geometric states/elements have no aberrations applied.
Computations by ...
Solar System Dynamics Group, Horizons On-Line Ephemeris System
4800 Oak Grove Drive, Jet Propulsion Laboratory
Pasadena, CA 91109 USA
Information: http://ssd.jpl.nasa.gov/
Connect : telnet://ssd.jpl.nasa.gov:6775 (via browser)
http://ssd.jpl.nasa.gov/?horizons
telnet ssd.jpl.nasa.gov 6775 (via command-line)
Author : Jon.D.Giorgini@jpl.nasa.gov
*******************************************************************************
$$SOE
2458327.347916670 = A.D. 2018-Jul-27 20:21:00.0003 TDB
X = 5.771034756256845E-01 Y =-8.321193799697072E-01 Z =-4.855790760378579E-05
VX= 1.434571674368357E-02 VY= 9.997686898668805E-03 VZ=-5.149408819470315E-05
LT= 5.848610189172283E-03 RG= 1.012655462859054E+00 RR=-3.979984423450087E-05
$$EOE
Чудесно! Теперь необходимо слегка обработать полученные данные напильником.
6. 38 попугаев и одно попугайское крылышко
Для начала определимся с масштабом, ведь наши уравнения движения (5) записаны в безразмерной форме. Данные, предоставленные NASA сами подсказывают нам, что за масштаб координат стоит взять одну астрономическую единицу. Соответственно в качестве эталонного тела, к которому мы будем нормировать массы других тел мы возьмем Солнце, а в качестве масштаба времени — период обращения Земли вокруг Солнца.
Все это конечно очень хорошо, но мы не задали начальные условия для Солнца. «Зачем?» — спросил бы меня какой-нибудь лингвист. А я бы ответил, что Солнце отнюдь не неподвижно, а тоже вращается по своей орбите вокруг центра масс Солнечной системы. В этом можно убедится, взглянув на данные NASA для Солнца
$$SOE
2458327.347916670 = A.D. 2018-Jul-27 20:21:00.0003 TDB
X = 6.520050993518213E+04 Y = 1.049687363172734E+06 Z =-1.304404963058507E+04
VX=-1.265326939350981E-02 VY= 5.853475278436883E-03 VZ= 3.136673455633667E-04
LT= 3.508397935601254E+00 RG= 1.051791240756026E+06 RR= 5.053500842402456E-03
$$EOE
Взглянув на параметр RG мы увидим, что Солнце вращается вокруг барицентра Солнечной системы, и на 27.07.2018 центр звезды находится от него на расстоянии в миллион километров. Радиус Солнца, для справки — 696 тысяч километров. То есть барицентр Солнечной системы лежит в полумиллионе километров от поверхности светила. Почему? Да потому что все остальные тела, взаимодействующие с Солнцем так же сообщают ему ускорение, главным образом, конечно тяжеленький Юпитер. Соответственно у Солнца тоже есть своя орбита.
Мы конечно можем выбрать эти данные в качестве начальных условий, но нет — мы же решаем модельную задачу трех тел, и Юпитер и прочие персонажи в неё не входят. Так что в ущерб реализму, зная положение и скорости Земли и Луны мы пересчитаем начальные условия для Солнца, так, чтобы центр масс системы Солнце — Земля — Луна находился в начале координат. Для центра масс нашей механической системы справедливо уравнение
Поместим центр масс в начало координат, то есть зададимся , тогда
откуда
Перейдем к безразмерным координатам и параметрам, выбрав
Дифференцируя (6) по времени и переходя к безразмерному времени получаем и соотношение для скоростей
где
Теперь напишем программу, которая сформирует начальные условия в выбранных нами «попугаях». На чем будем писать? Конечно же на Питоне! Ведь, как известно, это самый лучший язык для математического моделирования.
Однако, если уйти от сарказма, то мы действительно попробуем для этой цели питон, а почему нет? Я обязательно приведу ссылку на весь код в моем профиле Github.
# # Исходные данные задачи # # Гравитационная постоянная G = 6.67e-11 # Массы тел (Луна, Земля, Солнце) m = [7.349e22, 5.792e24, 1.989e30] # Расчитываем гравитационные параметры тел mu = [] print("Гравитационные параметры тел") for i, mass in enumerate(m): mu.append(G * mass) print("mu[" + str(i) + "] = " + str(mu[i])) # Нормируем гравитационные параметры к Солнцу kappa = [] print("Нормированные гравитационные параметры") for i, gp in enumerate(mu): kappa.append(gp / mu[2]) print("xi[" + str(i) + "] = " + str(kappa[i])) print("\n") # Астрономическая единица a = 1.495978707e11 import math # Масштаб безразмерного времени, c T = 2 * math.pi * a * math.sqrt(a / mu[2]) print("Масштаб времени T = " + str(T) + "\n") # Координаты NASA для Луны xL = 5.771034756256845E-01 yL = -8.321193799697072E-01 zL = -4.855790760378579E-05 import numpy as np xi_10 = np.array([xL, yL, zL]) print("Начальное положение Луны, а.е.: " + str(xi_10)) # Координаты NASA для Земли xE = 5.755663665315949E-01 yE = -8.298818915224488E-01 zE = -5.366994499016168E-05 xi_20 = np.array([xE, yE, zE]) print("Начальное положение Земли, а.е.: " + str(xi_20)) # Расчитываем начальное положение Солнца, полагая что начало координат - в центре масс всей системы xi_30 = - kappa[0] * xi_10 - kappa[1] * xi_20 print("Начальное положение Солнца, а.е.: " + str(xi_30)) # Вводим константы для вычисления безразмерных скоростей Td = 86400.0 u = math.sqrt(mu[2] / a) / 2 / math.pi print("\n") # Начальная скорость Луны vxL = 1.434571674368357E-02 vyL = 9.997686898668805E-03 vzL = -5.149408819470315E-05 vL0 = np.array([vxL, vyL, vzL]) uL0 = np.array([0.0, 0.0, 0.0]) for i, v in enumerate(vL0): vL0[i] = v * a / Td uL0[i] = vL0[i] / u print("Начальная скорость Луны, м/с: " + str(vL0)) print(" -//- безразмерная: " + str(uL0)) # Начальная скорость Земли vxE = 1.388633512282171E-02 vyE = 9.678934168415631E-03 vzE = 3.429889230737491E-07 vE0 = np.array([vxE, vyE, vzE]) uE0 = np.array([0.0, 0.0, 0.0]) for i, v in enumerate(vE0): vE0[i] = v * a / Td uE0[i] = vE0[i] / u print("Начальная скорость Земли, м/с: " + str(vE0)) print(" -//- безразмерная: " + str(uE0)) # Начальная скорость Солнца vS0 = - kappa[0] * vL0 - kappa[1] * vE0 uS0 = - kappa[0] * uL0 - kappa[1] * uE0 print("Начальная скорость Солнца, м/с: " + str(vS0)) print(" -//- безразмерная: " + str(uS0))
Выхлоп программы
Гравитационные параметры тел
mu[0] = 4901783000000.0
mu[1] = 386326400000000.0
mu[2] = 1.326663e+20
Нормированные гравитационные параметры
xi[0] = 3.6948215183509304e-08
xi[1] = 2.912016088486677e-06
xi[2] = 1.0
Масштаб времени T = 31563683.35432583
Начальное положение Луны, а.е.: [ 5.77103476e-01 -8.32119380e-01 -4.85579076e-05]
Начальное положение Земли, а.е.: [ 5.75566367e-01 -8.29881892e-01 -5.36699450e-05]
Начальное положение Солнца, а.е.: [-1.69738146e-06 2.44737475e-06 1.58081871e-10]
Начальная скорость Луны, м/с: [24838.98933473 17310.56333294 -89.15979106]
-//- безразмерная: [ 5.24078311 3.65235907 -0.01881184]
Начальная скорость Земли, м/с: [2.40435899e+04 1.67586567e+04 5.93870516e-01]
-//- безразмерная: [5.07296163e+00 3.53591219e+00 1.25300854e-04]
Начальная скорость Солнца, м/с: [-7.09330769e-02 -4.94410725e-02 1.56493465e-06]
-//- безразмерная: [-1.49661835e-05 -1.04315813e-05 3.30185861e-10]
7. Интегрирование уравнений движения и анализ результатов
Собственно само интегрирование сводится к более-менее стандартной для SciPy процедуре подготовки системы уравнений: преобразованию системы ОДУ к форме Коши и вызову соответствующих функций для преобразования системы к форме Коши вспоминаем, что
Тогда введя вектор состояния системы
сводим (7) и (5) к одному векторному уравнению
Для интегрирования (8) с имеющимися начальными условиями напишем немного, совсем немного кода
# # Вычисление векторов обобщенных ускорений # def calcAccels(xi): k = 4 * math.pi ** 2 xi12 = xi[1] - xi[0] xi13 = xi[2] - xi[0] xi23 = xi[2] - xi[1] s12 = math.sqrt(np.dot(xi12, xi12)) s13 = math.sqrt(np.dot(xi13, xi13)) s23 = math.sqrt(np.dot(xi23, xi23)) a1 = (k * kappa[1] / s12 ** 3) * xi12 + (k * kappa[2] / s13 ** 3) * xi13 a2 = -(k * kappa[0] / s12 ** 3) * xi12 + (k * kappa[2] / s23 ** 3) * xi23 a3 = -(k * kappa[0] / s13 ** 3) * xi13 - (k * kappa[1] / s23 ** 3) * xi23 return [a1, a2, a3] # # Система уравнений в нормальной форме Коши # def f(t, y): n = 9 dydt = np.zeros((2 * n)) for i in range(0, n): dydt[i] = y[i + n] xi1 = np.array(y[0:3]) xi2 = np.array(y[3:6]) xi3 = np.array(y[6:9]) accels = calcAccels([xi1, xi2, xi3]) i = n for accel in accels: for a in accel: dydt[i] = a i = i + 1 return dydt # Начальные условия задачи Коши y0 = [xi_10[0], xi_10[1], xi_10[2], xi_20[0], xi_20[1], xi_20[2], xi_30[0], xi_30[1], xi_30[2], uL0[0], uL0[1], uL0[2], uE0[0], uE0[1], uE0[2], uS0[0], uS0[1], uS0[2]] # # Интегрируем уравнения движения # # Начальное время t_begin = 0 # Конечное время t_end = 30.7 * Td / T; # Интересующее нас число точек траектории N_plots = 1000 # Шаг времени между точкими step = (t_end - t_begin) / N_plots import scipy.integrate as spi solver = spi.ode(f) solver.set_integrator('vode', nsteps=50000, method='bdf', max_step=1e-6, rtol=1e-12) solver.set_initial_value(y0, t_begin) ts = [] ys = [] i = 0 while solver.successful() and solver.t <= t_end: solver.integrate(solver.t + step) ts.append(solver.t) ys.append(solver.y) print(ts[i], ys[i]) i = i + 1
Посмотрим что у нас получилось. Получилась пространственная траектория Луны на первый 29 суток от выбранной нами начальной точки

а так же её проекция в плоскость эклиптики.

«Эй, дядя, что ты нам впариваешь?! Это же окружность!».
Во-первых, таки не окружность — заметно смещение проекции траектории от начала координат вправо и вниз. Во-вторых — ничего не замечаете? Не, ну правда?
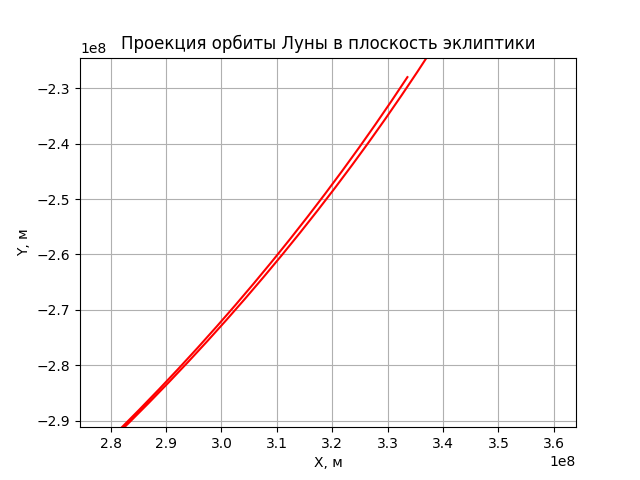
Обещаю подготовить обоснование того (на основе анализа погрешностей счета и данных NASA), что полученное смещение траектории не есть следствие ошибок интегрирования. Пока предлагаю читателю поверить мне на слово — это смещение есть следствие солнечного возмущения лунной траектории. Крутанем-ка еще один оборот


Во как! Причем обратите внимание на то, что исходя из начальных данных задачи Солнце находится как раз в той стороне, куда смещается траектория Луны на каждом обороте. Да это наглое Солнце ворует у нас наш любимый спутник! Ох уж это Солнце!
Можно сделать вывод, что солнечная гравитация влияет на орбиту Луны достаточно существенно — старушка не ходит по небу дважды одним и тем же путём. Картинка за полгода движения позволяет (по крайней мере качественно) убедится в этом (картинка кликабельна)

Интересно? Ещё бы. Астрономия вообще наука занятная.
Постскриптум
В вузе, где я учился и работал без малого семь лет — Новочеркасском политехе — ежегодно проводилась зональная олимпиада студентов по теоретической механике вузов Северного Кавказа. Трижды мы принимали и Всероссийскую олимпиаду. На открытии, наш главный «олимпиец», профессор Кондратенко А.И., всегда говорил: «Академик Крылов называл механику поэзией точных наук».
Я люблю механику. Всё то хорошее, чего я добился в своей жизни и карьере произошло благодаря этой науке и моим замечательным учителям. Я уважаю механику.
Поэтому, я никогда не позволю издеваться над этой наукой и нагло эксплуатировать её в своих целях никому, будь он хоть трижды доктор наук и четырежды лингвист, и разработал хоть миллион учебных программ. Я искренне считаю, что написание статей на популярном публичном ресурсе должно предусматривать их тщательную вычитку, нормальное оформление (формулы LaTeX — это не блажь разработчиков ресурса!) и отсутствие ошибок, приводящих к результатам нарушающим законы природы. Последнее вообще «маст хэв».
Я часто говорю своим студентам: «компьютер освобождает ваши руки, но это не значит, что при этом нужно отключать и мозг».
Ценить и уважать механику я призываю и вас, мои уважаемые читатели. Охотно отвечу на любые вопросы, а исходный текст примера решения задачи трех тел на языке Python, как и обещал, выкладываю в своем профиле Github.
Спасибо за внимание!
ссылка на оригинал статьи https://habr.com/post/420133/
Добавить комментарий