Эксперимент с самоделкой в европейском исследовательском подразделении IBM породил ценный инструмент
Ссылка на проект: github.com/IBM/MicroscoPy
Я член команды IBM Research–Europe в Цюрихе, разрабатывающий технологии в области микрогидродинамики для медицинского применения. Два года назад меня попросили сделать высококачественные фотографии и видео с нашими чипами для микрофлюидики для большой выставки. Я занял у коллеги видеокамеру на 4K, прикрутил к ней макрообъектив, сделал рассеиватель при помощи светодиодной матрицы и пластиковой плёнки, и разместил все материалы при помощи высококачественного штатива и микроманипуляторов. У меня получилось заснять красивые ролики о том, как жидкости заполняют микроканалы. Я понял, что наши презентации и публикации должны выйти на этот новый уровень качества Однако моя установка занимала половину верстака в лаборатории, а для записи одного кадра требовалось тратить на настройку по нескольку часов.
У нас в IBM в Цюрихе есть традиция – изобретать микроскопы. В 1981 году Герд Карл Бинниг и Генрих Рорер создали здесь сканирующий туннельный микроскоп. Я, как любитель самоделок, встал на путь создания улучшенной установки. В результате у меня получился модульный моторизованный микроскоп за $300, сочетающий в себе три моих любимых взрослых хобби: Arduino, Raspberry Pi и Lego.
Сделать фото микрофлюидного чипа нелегко. Чипы обычно получаются слишком большими для того, чтобы уместиться в поле зрения стандартного микроскопа, однако в то же время у них есть такие мелкие детали, которые не сможет снять обычная камера. Также чрезвычайно важно организовать однородное освещение, поскольку чипы часто делают из прозрачных материалов или имеющих высокую отражающую способность. Если посмотреть на публикации других исследовательских групп, будет очевидно, что проблема эта распространённая. Вот такая мотивация подвигла меня на то, чтобы потратить часть свободного времени на разработку многоцелевого и компактного лабораторного инструмента, способного делать макрофотографии почти с любого угла.
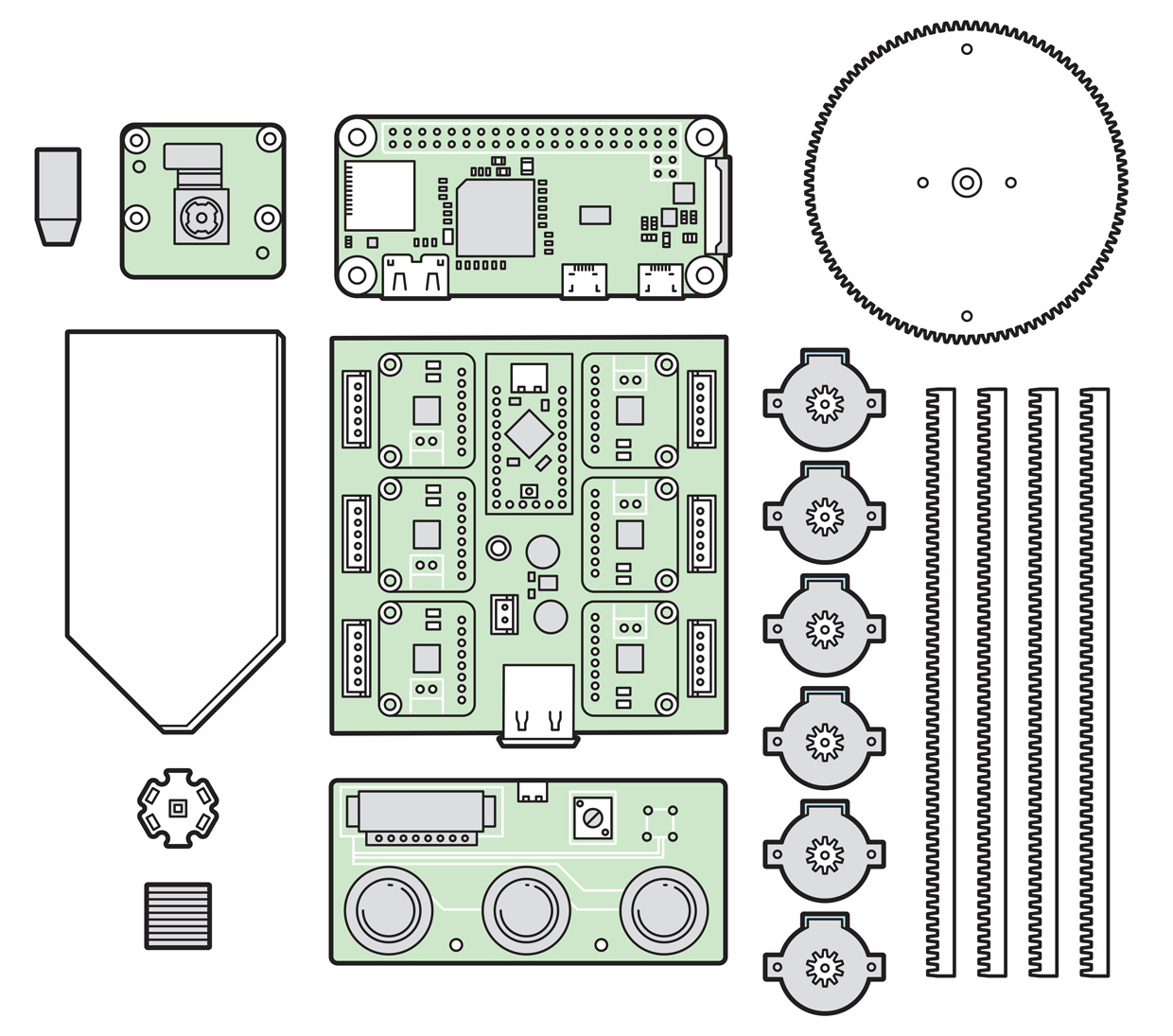
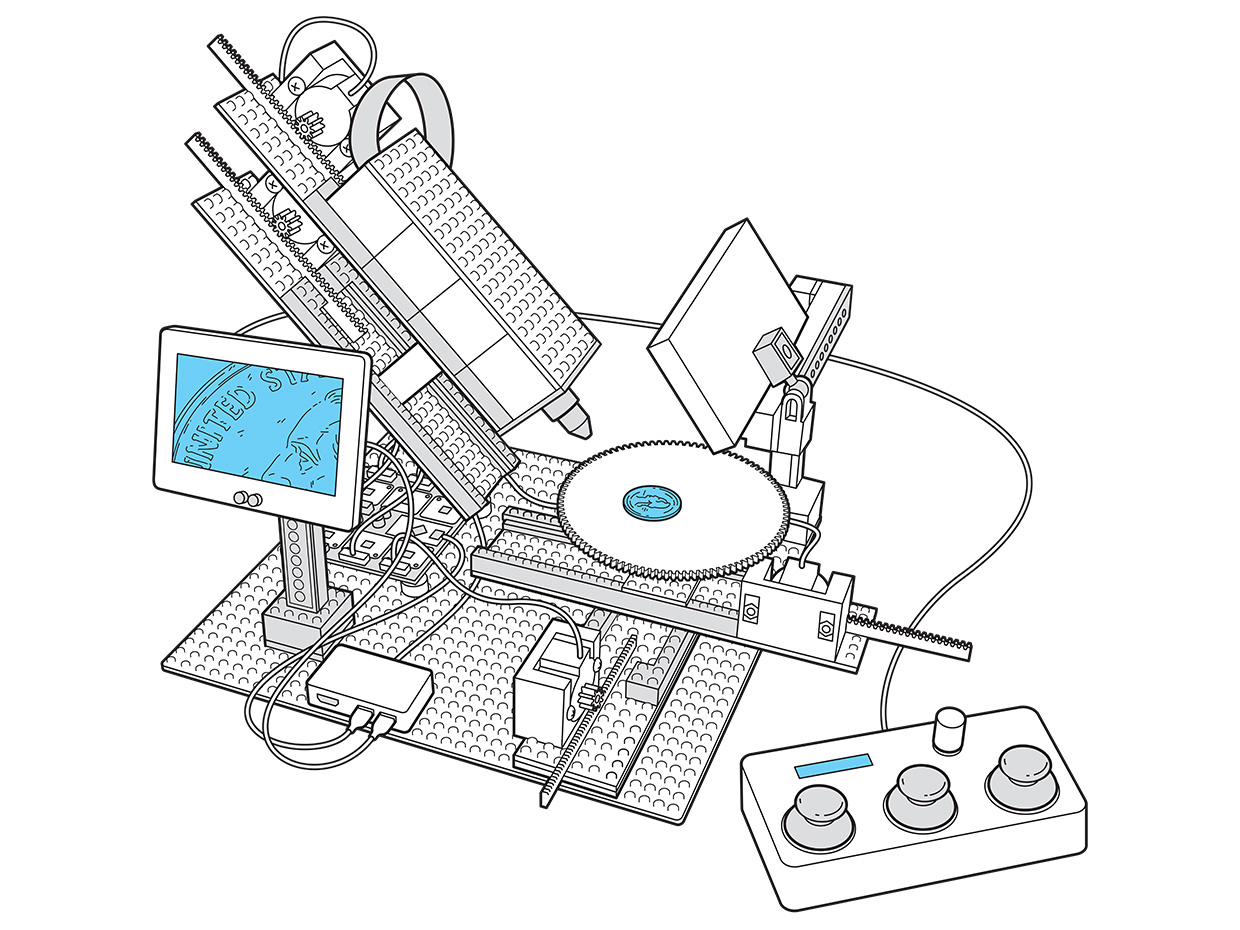
Смешанные компоненты: в микроскопе используется сборная солянка из разных технологий и материалов, включая детальки Lego в качестве главных структурных компонентов и распечатанные на 3D-принтере шестерни и направляющие для движущихся частей. Шаговыми моторами, обеспечивающими точное передвижение, управляет плата драйвера и Ardiuno. Модули Raspberry Pi Zero и Pi-камера используются для фотографирования. Сначала я сделал микроскоп при помощи специально изготовленных плат и запчастей, распечатанных на принтере высокого разрешения, однако перед публикацией я переделал схему так, чтобы его можно было собрать частично из готовых частей, и частично из компонентов, которые можно печатать на недорогих принтерах.
Первым прототипом был модуль камеры Raspberry Pi на площадке, двигавшейся в трёх измерениях при помощи линейных шаговых моторов от старых приводов CD-ROM. Камера Raspberry Pi стала идеальным выбором потому, что позволяла вручную устанавливать такие критические важные параметры съёмки, как ISO и выдержку. Я удалил с неё корпус объектива, открыв доступ к фотоматрице, и сделал точный механизм, двигающий линзу вперёд-назад так, чтобы можно было делать фотографии с высоким разрешением. Всё это работало какое-то время, но механизм получился хрупким. Несколько раз я ломал механизм и повреждал фотоматрицу, когда случайно заставлял движущиеся части выходить за пределы допустимого.
Поэтому я решил действовать иначе. Я удалил линзу из Pi-камеры. Потом я взял объектив от недорогого USB-микроскопа и установил на другой линейный мотор от CD-привода, так, чтобы объектив двигался вперёд-назад вдоль оптической оси Pi-камеры. Кожух для защиты фотоматрицы я сделал из деталек Lego.
Однако в итоге я лишь понял, почему микроскопы получаются такими дорогими: расстояние, на которое мог двигаться механизм CD-привода, не хватало для того, чтобы получить приемлемый диапазон увеличения.
Я перешёл на винтовую передачу, которую используют в 3D-принтерах. Для компактности я использовал компоненты диаметром 3 мм вместо популярных 8 мм. Также, поскольку при передвижении линзы возникали проблемы с лишним светом, я решил вместо неё двигать фотоматрицу. Я сделал площадку, на которой снимаемый объект можно было двигать по осям x и y, и вращать. В итоге у меня получилось шесть миниатюрных шаговых двигателей с коробками передач, что позволяет мне двигать площадку, наклонять микроскоп, подстраивать расстояние до объекта и проводить фокусировку.
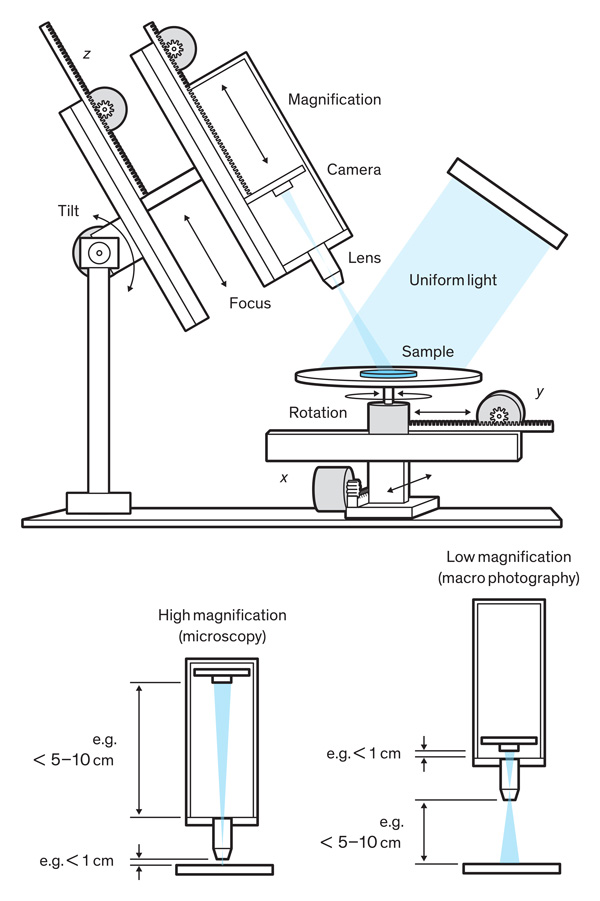
Идеальный угол: Lego-микроскоп позволяет поместить образец под однородный свет светодиодов. Его можно двигать вперёд-назад, влево-вправо, а также поворачивать. Микроскоп можно наклонять вперёд и назад, и настраивать фокусировку для разных степеней увеличения. Последнее осуществляется передвижением камеры внутри кожуха из Lego.
Я часто самостоятельно делаю специальные платы с Arduino, чтобы проекты получались более компактными. Для данного случая я разработал плату 18×18 мм с микроконтроллером ATtiny84 и драйвером моторов DRV8834. Картинка у устройства получилась неожиданно качественная, и аппарат хорошо подошёл не только для получения красивых фотографий чипов, но и для изучения различных деталей размером в несколько микрометров, а также в качестве цифрового гониометра для измерения углов соприкосновения. Я начал проект с конкретной целью, но вскоре стало ясно, что его можно переделать в многоцелевую систему получения изображений, которую мог бы собрать и использовать дома и в школе любой человек.
Компания поддержала моё стремление опубликовать инструкции по сборке устройства. Однако при подготовке инструкций к выпуску меня начали беспокоить несколько проблем. Я собирал своё устройство с использованием передового 3D-принтера и полностью оборудованной мастерской. Использованные мною небольшие шаговые моторы – дорогие, и их не купить в популярных магазинах электроники для любителей. Программировать ATtiny84 через ISP-программатор было не так удобно, как программировать коммерческий Arduino через USB. Я вернулся к разработке и переработал весь проект с нуля, используя легкодоступные компоненты – такие, как платы Arduino, драйверы шаговые моторы от Adafruit Industries, популярные и недорогие шаговые моторы 28BYJ-48.
Осветительную светодиодную матрицу я заменил на более удобную в работе и недорогую. Я купил модуль светодиодной подсветки в Adafruit за $3 и подключил к нему мощный светодиод. Яркость получилась не такой большой, однако свет вышел достаточно однородным, как для освещения отражённым, так и проходящим светом. Новые линейные моторы я сделал из зубчатых планок с шестерёнками от Lego, а недостающие детали нарисовал в FreeCAD и распечатал на домашнем 3D-принтере Creality Ender 3 Printer. И новый вариант работал не хуже старого, если не лучше.
Вероятно, в проекте очень много чего ещё можно улучшить, и я надеюсь, что этот прототип побудит других любителей на изготовление новых и улучшенных версий. Заменит ли он лабораторный микроскоп? Возможно, нет – но это прекрасное решение для школ с ограниченным бюджетом. Поэтому мы сделали инструкции по его сборке свободными и открытыми для всех.
ссылка на оригинал статьи https://habr.com/ru/post/504360/
Добавить комментарий