Очередная статья: STM32 для начинающих
И как этим пользоваться?
В предыдущей статье создали класс для работы с портами ввода-вывода, проверили. И что дальше? Зачем это все запихивать в класс?
Возьмем для примера простенький опрос кнопок:
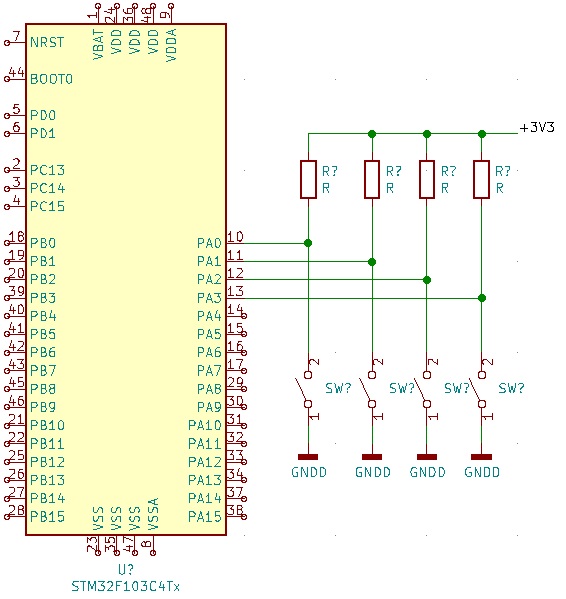
Для этой схемы в простейшем случае опрос будет выглядеть так
int GetKey() { volatile uint32_t* addr = reinterpret_cast<uint32_t*>(GPIOA_IDR); uint32_t ret_val = *addr; return ret_val & 0x0F; } Но, если в схеме поменять порты, подсоединенные к кнопкам, то придется менять и функцию опроса. И так в каждом проекте. Это не всегда удобно. Хочется один раз написать, протестировать и пользоваться.
Перепишем эту функцию под ранее созданный класс:
int GetKey(Pin* p0, Pin* p1, Pin* p2, Pin* p3) { int ret_val = p0->Get() + (p1->Get() << 1) + (p2->Get() << 2) + (p3->Get() << 3); return ret_val; }Остается в главной программе инициализировать порты и передать в функцию:
... using namespace STM32F1xx; Pin key0('a', 0); Pin key1('a', 1); Pin key2('a', 2); Pin key3('a', 3); ... int main() { key0.ModeInput(); key1.ModeInput(); key2.ModeInput(); key3.ModeInput(); int key_code = GetKey(&key0, &key1, &key2, &key3); ... return 0; }
А где же интерфейсы?
А теперь представим, законились контроллеры серии f10x, но есть куча f030. По производительности и количеству выводов хватает, только надо хедер поменять для функции GetKey или воспользоваться… #ifdef. Сделать глобальный заголовочный файл, в котором прописть тип используемого контроллера (что то типа #define STM32F030) и нагородить кучу дефайнов. Нет, не для этого создавались языки высокого уровня, что бы путаться в макросах!
Пойдем другой дорогой. Создадим класс, в котором перечислим виртуальные методы, необходимые нам по жизни для работы с портами:
#pragma once class iPin { public: virtual void ModeInput() = 0; virtual void ModeAnalogInput() = 0; virtual void ModeInputPulled() = 0; virtual void ModeOutput() = 0; virtual void ModeOutputOpenDrain() = 0; virtual void Set(bool st) = 0; virtual bool Get() = 0; virtual void Reverse() { Set(!Get());} void On() { Set(true); } void Off() { Set(false); } };
(те методы, которые приравнены 0, должны быть определены в производном классе!)
и будем его использовать как базовый в классе Pin:
... #include "iPin.h" ... class Pin : public iPin ...тогда функция GetKey чуть изменится:
int GetKey(iPin* p0, iPin* p1, iPin* p2, iPin* p3) { int ret_val = p0->Get() + (p1->Get() << 1) + (p2->Get() << 2) + (p3->Get() << 3); return ret_val; } Теперь нам любой контроллер нипочем! Даже если это шинный расширитель, работающий по SPI или I2C. Последовательные интерфейсы рассмотрим в следующих статьях.
И что дальше?
Дальше надо оформить класс для работы с системным таймером. Но это уже в следующей публикации.
ссылка на оригинал статьи https://habr.com/ru/post/518878/
Добавить комментарий