
Нейронные сети – это статистические вычислительные модели, применяемые к множеству практических задач, в том числе обработка изображений, машинный перевод и поиск шаблонов. При обучении с учителем, нейросеть тренируется на примере уже известных объектов, то есть для всех исходных данных у нас есть предопределенный правильный ответ. Главная идея обучения нейросети – это настроить такую конфигурацию, при которой ответы модели будут максимально приближены к корректным. Что же до рекуррентных нейросетей, то они не только обучаются на исходных объектах, но и предоставляют контекст для каждого следующего предсказания. Это помогает нейросети сохранять состояние, в котором было принято решение. В этой статье мы обсудим применение рекуррентных нейросетей (РНС) в проблеме исследования процесса в process mining.
Задача исследования процесса состоит в получении модели, которая будет отражать поведение, заложенное в исходных данных. Так как это похоже на задачу распознавания шаблонов, то в этой статье мы сфокусируемся на решении задачи исследования процесса с использованием рекуррентных нейросетей. Касательно лога событий в качестве обучающих данных, для каждого события в логе мы будем тренировать нашу нейросеть предсказывать следующее событие. Наша конечная цель извлечь систему переходов, которая представляет собой модель процесса, представленного в логе событий.
Для прояснения подхода возьмём лог событий L = [(a, b, c, d, e), (a, b, d)] в качестве примера. Внутренние вычисления нейросети требуют предобработку последовательностей событий следующим образом:
1. Добавим два зарезервированных токена «$» и «#» в каждую последовательность указывающих на начало и конец последовательности соответственно
2. Дополним все последовательности символом «#», чтобы они имели одинаковую длину
Таким образом L преобразуется в L ̃ = [($, a, b, c, d, e, #), ($, a, b, d, #, #, #)] с последовательностями одинаковой длины в 7 символов. Также закодируем имеющиеся токены целыми числами от 0 до |Ʌ|+1 (где |Ʌ| — мощность множества входящих токенов)
Предобработка лога событий загруженного в pandas.DataFrame def preprocessing(df): tracks = [list(track.sort_values(by=["timest"], ascending=True).activity.values) for track_id, track in df.groupby(df.trace)] tokens = sorted(list(set(df.activity)) +['#']) token_to_id = {t:i for i,t in enumerate(tokens)} id_to_token = {i:t for i,t in enumerate(tokens)} MAX_LEN = max(list(map(len, tracks))) tracks_ix = list(map(lambda track: list(map(token_to_id.get,track)), tracks)) for i in range(len(tracks_ix)): if len(tracks_ix[i]) < MAX_LEN: tracks_ix[i] += [token_to_id['#']]*(MAX_LEN - len(tracks_ix[i])) tracks_ix = np.array(tracks_ix) return tokens, tracks_ix, id_to_token, token_to_id tokens, tracks_ix, id_to_token, token_to_id = preprocessing(df) Для построения желаемой системы переходов мы создадим нейросеть способную генерировать последовательности из входящего лога событий. На каждом шаге нейросеть предсказывает вероятности следующих возможных токенов и выбирает наиболее вероятный токен. Интерпретация проблемы предсказания токенов, как задачи классификации позволяет нам использовать специфические методы и архитектуры, доказавшие свою эффективность. Для каждого токена (события) ai мы хотим определить класс последующего токена ai+1, то есть активность, представленную им. Более того, мы должны принять во внимание историю последовательности, иначе прогноз будет зависеть только от предыдущего токена, что приведет к построению графа отношений между индивидуальными событиями. Вот почему присутствует повторяющееся соединение, формирующее более сложный входной вектор. Если нейросеть способна генерировать правдоподобные последовательности, то внутреннее состояние, из которого получен прогноз, вероятно и представляет историю последовательности и текущий токен и может использоваться как состояние в системе переходов. Для решения этой задачи используем нейросеть следующей архитектуры:
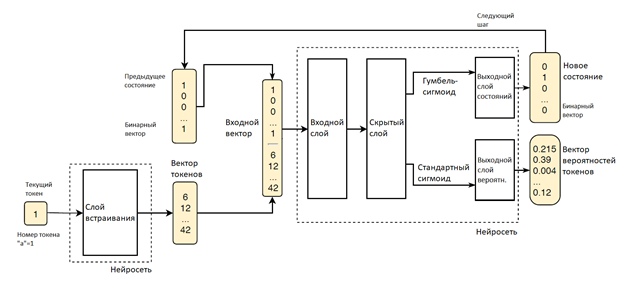
В слое встраивания целое, кодирующее следующий токен из последовательности, трансформируется в вектор токена. Входной вектор для нейросети это соединение двух векторов: бинарного вектора, представляющего предыдущее состояние нейросети и вектор токенов. Далее входной вектор отправляется в скрытый слой, где к вектору применяется линейная трансформация. После этого различные функции активации применяются к вычисленному вектору для извлечения двух различных объектов в выходном слое. Первый – это новый дискретный бинарный вектор, интерпретирующий новое состояние РНС и используемый в качестве параметра для следующей итерации. Для его вычисления мы используем Гумбель-сигмоиду, как доказавшую свою эффективность при аппроксимации дискретных значений. Второй – вектор вероятностей токенов (Таблица 1). Для него мы используем стандартную сигмоиду, так как ее значения относятся к отрезку [0;1].
|
$ |
a |
… |
# |
|
0.215 |
0.39 |
… |
0.12 |
Таблица 1. Вероятности токенов для первой последовательности лога ~L
sequence = T.matrix('token sequence','int64')Настрока архитектуры нейросети: def model(tokens, token_to_id, neurons_num=5): sequence = T.matrix('token sequence','int64') inputs = sequence[:,:-1] # по символу предсказываю следующий, поэтому входные - все, кроме последнего targets = sequence[:,1:] # а выходные - все, кроме первого l_input_sequence = InputLayer(shape=(None, None),input_var=inputs) tau = theano.shared(np.float32(0.1)) pseudo_sigmoid = GumbelSigmoid(t=tau) class step: #inputs h_prev = InputLayer((None, neurons_num),name='previous rnn state') inp = InputLayer((None,),name='current character') emb = EmbeddingLayer(inp, len(tokens), 30, name='emb') # сопоставление при условии минимума фции потерь #recurrent part f_dense = DenseLayer(concat([h_prev, emb]), num_units=8, nonlinearity=T.nnet.relu) # 0 .. +inf s_dense = DenseLayer(f_dense, num_units=neurons_num, nonlinearity=None) # -inf .. +inf next_state_probs = NonlinearityLayer(s_dense, T.nnet.sigmoid) # Вероятность битов состояния h_new = NonlinearityLayer(s_dense, pseudo_sigmoid) # Новое состояние - вектор битов next_token_probas = DenseLayer(s_dense, len(tokens),nonlinearity=T.nnet.softmax) # Вероятность токена - P(Ti|Ti-1....T0) batch_size = sequence.shape[0] initial_state = InputLayer((None, neurons_num), T.zeros((batch_size, neurons_num))) training_loop = Recurrence( state_variables={step.h_new:step.h_prev}, state_init={step.h_new:initial_state}, input_sequences={step.inp:l_input_sequence}, tracked_outputs=[step.next_token_probas,], unroll_scan=False, ) weights = lasagne.layers.get_all_params(training_loop, trainable=True) predicted_probabilities = lasagne.layers.get_output(training_loop[step.next_token_probas]) xent = lasagne.objectives.categorical_crossentropy(predicted_probabilities.reshape((-1,len(tokens))), targets.reshape((-1,))).reshape(targets.shape) mask = T.neq(inputs, token_to_id["#"]) # оставляем только значимые токены, т.к. незначимые появились после паддинга loss = (mask * xent).sum(axis=1).mean() # функция ошибки #<Loss function - a simple categorical crossentropy will do, maybe add some regularizer> updates = lasagne.updates.adam(loss, weights) train_step = theano.function([sequence], loss, updates=training_loop.get_automatic_updates()+updates) h_deterministic = NonlinearityLayer(step.next_state_probs, lambda x: T.gt(x, 0.5).astype(x.dtype)) validation_loop = Recurrence( state_variables={h_deterministic:step.h_prev}, state_init={h_deterministic:initial_state}, input_sequences={step.inp:l_input_sequence}, tracked_outputs=[step.next_token_probas,], unroll_scan=False, ) states_seq = get_output(validation_loop[h_deterministic], {l_input_sequence:sequence}) infer_states = theano.function([sequence], states_seq, updates=None) return train_step, infer_statesМы используем вектор вероятностей токенов для вычисления нашей функции потерь следующим образом. Построим m x r матрицу потерь (кросс-энтропии), где m – количество последовательностей в входном логе, а r – максимальная длина предобработанной последовательности. Каждая строка матрицы относится к последовательности лога, каждый элемент относится к токену (событию) в последовательности. На каждом шаге элемент вычисляется как кросс-энтропия H(y^i, yi), где y^i предсказанная вероятность токена, а yi – реальная.
Так как после предобработки у нас есть излишние символы, которые мы не хотим использовать для обучения нашей модели, мы должны отбросить некоторые ячейки, умножив вычисленную матрицу потерь на маскирующую матрицу. Маскирующая матрица – это матрица с единицами в ячейках с реальными и «$» токенами и нулями в ячейках с «#» токенами. Таким образом умножение оставляет только необходимые значения кросс-энтропии. В итоге функция потерь вычисляется как среднее от сумм по каждой строке (Таблица 2)
|
$ 2.57 |
a 1.45 |
b 2.65 |
c 1.77 |
d 3.72 |
e 4.62 |
# 0 |
16.78 |
|
$ 2.57 |
a 1.45 |
b 2.65 |
d 2.51 |
# 0 |
# 0 |
# 0 |
9.18 |
|
Среднее |
12.98 |
||||||
Таблица 2. Матрица кросс-энтропии лога ~L
Обучение представляет собой направление нашего лога событий нейросети последовательность за последовательностью и минимизация функции потерь, описанной выше методом стохастического градиентного спуска.
Обучение нейросети: def training(tokens, tracks_ix, token_to_id, neurons_num=5, n_epochs = 25, batches_per_epoch = 250, batch_size= 10): train_step, infer_states = model(tokens,token_to_id) for epoch in range(n_epochs): avg_cost = 0; for _ in range(batches_per_epoch): avg_cost += train_step(sample_batch(tracks_ix, batch_size)) print("\n\nEpoch {} average loss = {}".format(epoch, avg_cost / batches_per_epoch)) return infer_states infer_states = training(tokens, tracks_ix, token_to_id, 10)Итоговая система переходов (TS) формируется исходя из состояний рекуррентной нейросети, представляющих собой входящий вектор для РНС и новый входящий токен из исходной последовательности и образующих состояния TS. Эти состояния соединяются переходами, определяющимися по исходному токену.
Построение TS: def build_json(filename, inferred_states, tracks_ix, neurons_num=10): graph = {"states":set(), "transitions":list(), "meta":{"isAccepting":set()}} all_states = [] all_used_states = set() for binary_states in inferred_states: binary_states = np.vstack((np.zeros(neurons_num), binary_states)) # add initial state states = list(map(binary_state_to_id, binary_states)) graph["states"].update(set(states)) all_states.append(states) for states, track_ids in zip(all_states, tracks_ix): track = list(map(id_to_token.get, track_ids)) for index, symbol in enumerate(track): transition = {"from":states[index], "to":states[index + 1], "track":symbol} all_used_states.add(transition["from"]) all_used_states.add(transition["to"]) if transition not in graph["transitions"]: graph["transitions"].append(transition) graph["meta"]["isAccepting"].add(states[len(track)]) graph["states"] = list(all_used_states) graph["meta"]["isAccepting"] = list(graph["meta"]["isAccepting"]) graph["meta"]["tracksNum"] = len(tracks_ix) with open(filename, "w") as json_file: json.dump(graph, json_file) return graph inferred_states = infer_states(tracks_ix) graph = build_json(json_filename, inferred_states, tracks_ix) Отрисовка графа: def build_dot(json_graph, filename): graph = "digraph test {\n" for state in json_graph["states"]: if state in json_graph["meta"]["isAccepting"]: graph += "\t" + state + " [shape=doublecircle];\n" else: graph += "\t" + state + ";\n" for transition in json_graph["transitions"]: graph += "\t" + transition["from"] + " -> " + transition["to"] graph += " [label=\"" + transition["track"] + "\"];\n" graph += "}" with open(filename, "w") as graph_file: print(graph, file=graph_file, end="") return graph dot_graph = build_dot(graph, dot_filename)
В этой работе мы смогли применить нейросети для моделирования процесса на основе лога событий. Полученные результаты дают основу для дальнейших исследований, а также могут применяться в задаче прогнозирования следующего события процесса на основе уже произошедших.
ссылка на оригинал статьи https://habr.com/ru/post/566114/
Добавить комментарий