Здравствуйте, уважаемые хабаровчане, недавно подкинули задачу по подключению неавторизованных устройств к Вега БС 2.2 на нахождение информации пришлось потратить достаточно большое количество времени, а результатом работы стали несколько подключенных устройств и вот такая инструкция, которую я предлагаю взять за основу тем, кто столкнется со схожими проблемы

Порядок действий для подключения к станции для её настройки:
1. Подключить базовую станцию к POE-адаптеру;
2. Подключить POE-адаптер к LAN разъему сетевого оборудования и подключить в сеть электропитания;
3. Подключить базовую станцию к компьютеру по Ethernet; (или по USB)
4. Убедиться, что станция получила IP-адрес от DHCP-сервера;
5. Открыть программу PuTTY(или другом эмуляторе терминала), выполнить подключение по SSH по 22 порту на адрес станции
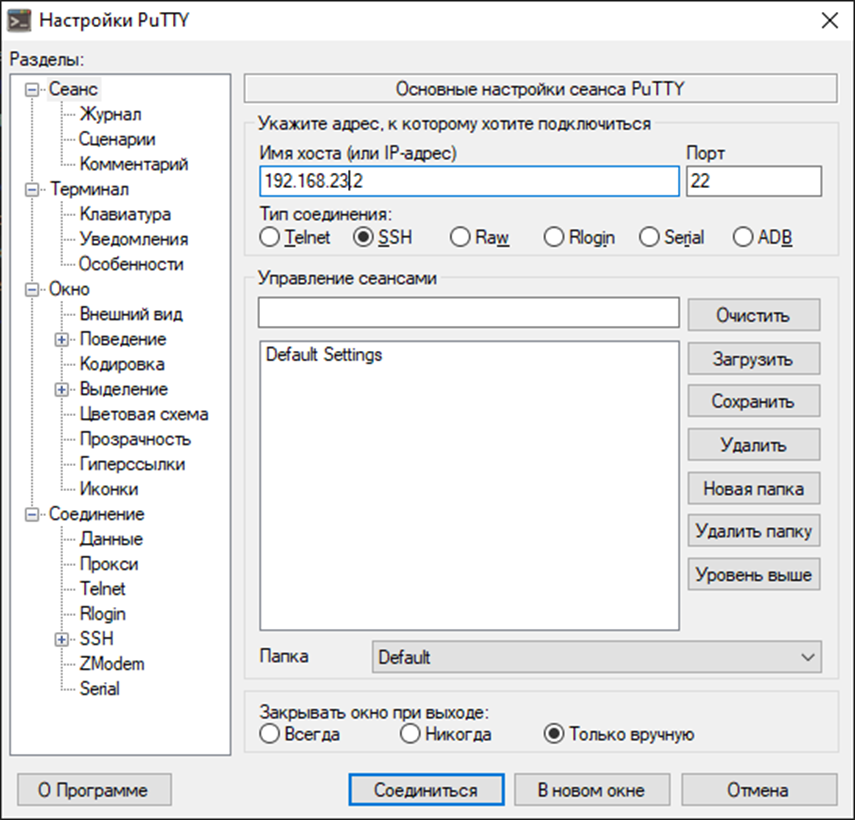
6. Ввести в качестве логина root, а в качестве пароля – temppwd
7. Программа Packet forwarder запускается автоматически при старте системы. Перед тем, как настраивать базовую станцию нужно завершить процесс Packet forwarder, набрав команду:
/etc/init.d/lora_watchdog stop
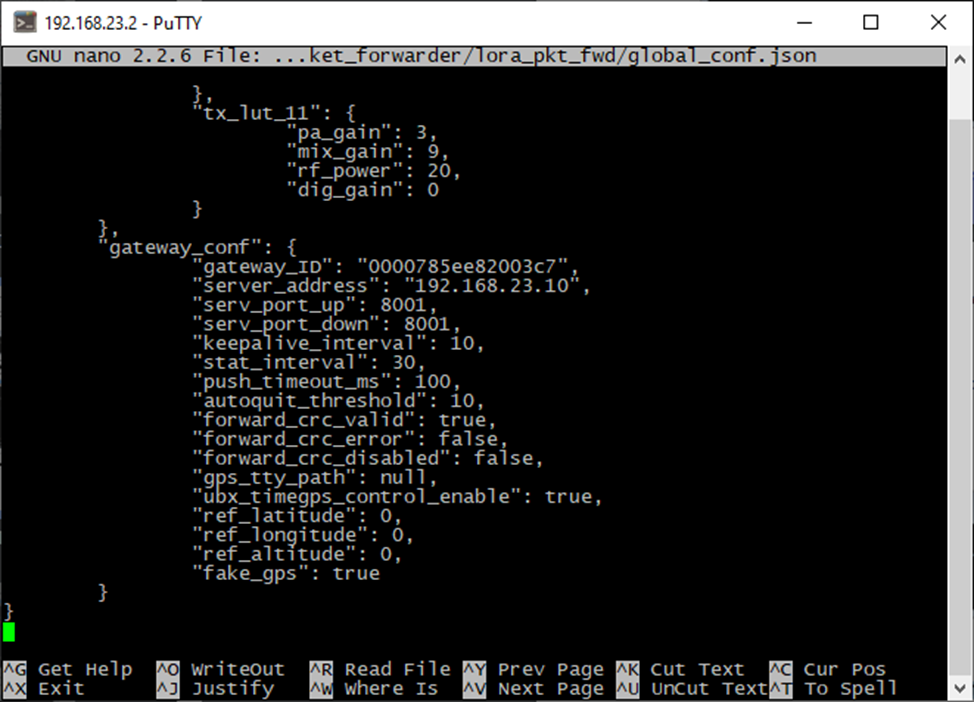
8. Для изменения настроек необходимо в терминале набрать команду:
nano LoRa/packet_forwarder/lora_pkt_fwd/global_conf.json
9. Листаем файл настроек вниз до строчки gateway_conf.
10. В данном разделе нужно указать IP-адрес и UDP-порт сервера, указанные в файле настроек сервера settings.conf.
11. После внесения изменений нажать ctrl+X – выход из файла. На предложенный вопрос о сохранении изменений нажать клавишу Y.
12. После изменения настроек базовой станции необходимо снова запустить процесс отправки пакетов:
/etc/init.d/lora_watchdog start
Теперь станция может принимать пакеты.
Для хранения данных с оконечных устройств и дальнейших операции над них нужно развернуть сервер.
Настройка сервера заключается в загрузке архива с ПО, настройке конфигурационного файла settings.conf в ней и запуске приложения сервера, которое будет работать в виде консоли.
Скачать серверное ПО можно адресу.
В файле settings.conf нужно обратить внимание на следующие строки:
|
Параметр и значение по умолчанию |
Комментарии |
|
ip=127.0.0.1 |
Адрес сервера (по умолчанию свой) |
|
root=root |
Имя пользователя |
|
password=123 |
Пароль пользователя |
|
udpport=8001 |
Порт для передачи данных, должен совпадать с указанным на станции |
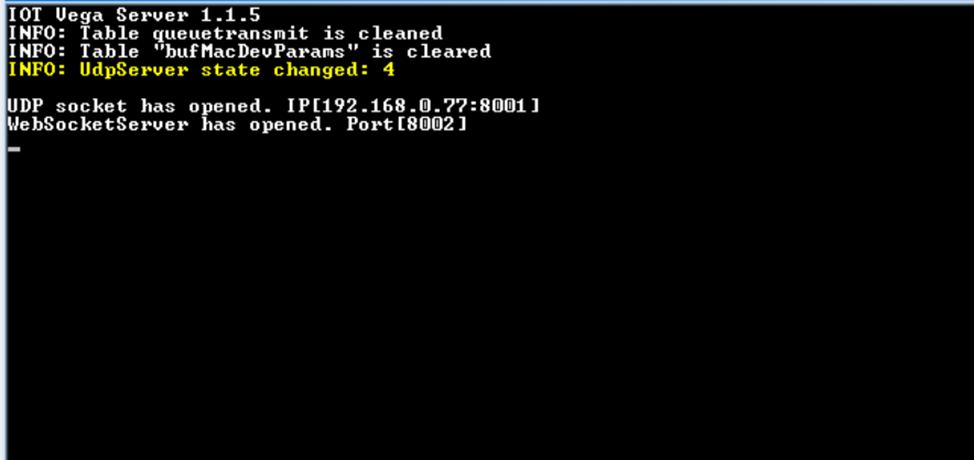
После этого можно запустить файл iot-vega-server.exe и убедиться, что сервер работает.
О корректной работе сервера говорят строки UDP socket has opened и WebSocketServer has opened, а также отсутствие каких-либо сообщений об ошибках.
Также для просмотра данных с оконечных устройств и их настройки можно скачать веб-интерфейс AdminTool.
Для его настройки нужно зайти в файл confiоg.js и обратить внимание на следующую строку:
const address_ws = ‘ws://192.168.0.1:8002’;
Вместо адреса 192.168.0.1 нужно указать адрес вашего сервера, а вместо 8002 указать TCP-порт.
Далее нужно открыть файл index.html в браузере. В соответствующих полях нужно ввести имя и пароль, заданные в файле settings.conf. После этого появится главная страница сайта

Теперь, когда станция и сервер видят друг друга, и станция может посылать данные, пришедшие с оконечного устройства, можно настроить получение данных от оконечных устройств.
В качестве микроконтроллера для получения и передачи данных, полученных уже непосредственно от датчиков, была выбрана плата Arduino Uno. Для возможности передачи данных на частотах LoRa, необходимо подключить радио модуль RFM95W.
Антенну для 868-й частоты рекомендуется делать 82-83мм
Сервер не добавляет устройства автоматически, если увидит их. Поэтому для получения данных с устройств нужно обязательно добавить их на сервер.

Далее будет написан код для платы. В нём стоит обратить внимание на следующие строки:
1. Аутефикационные реквизиты для устройств:
static const PROGMEM u1_t NWKSKEY[16] = { 0x2B, 0x7E, 0x15, 0x16, 0x28, 0xAE, 0xD2, 0xA6, 0xAB, 0xF7, 0x15, 0x88, 0x09, 0xCF, 0x4F, 0x3E }; static const u1_t PROGMEM APPSKEY[16] = { 0x2B, 0x7E, 0x15, 0x16, 0x28, 0xAE, 0xD2, 0xA6, 0xAB, 0xF7, 0x15, 0x88, 0x09, 0xCF, 0x4F, 0x3D }; static const u4_t DEVADDR = 0x00000013 ; Тут нужно для каждого устройства написать свои реквизиты.
2. Функция do_send, в которой мы отправляем сам контента так же именно здесь с ним нужно работать
void do_send(osjob_t* j){ if (LMIC.opmode & OP_TXRXPEND) { Serial.println(F("OP_TXRXPEND, not sending")); } else { LMIC_setTxData2(1, mydata, sizeof(mydata)-1, 0); Serial.println(F("Packet queued")); } } Пример подключения:
3. Интервал передачи данных
const unsigned TX_INTERVAL = 5;
Значение переменной задаёт время между отправкой пакетов в секундах.
4. В методе setup() нужно инициировать датчик. Конкретная инструкция варьируется в зависимости от устройства.
До строки «Serial.println(F(«Packet queued»));» нужно присвоить переменной mydata нужные данные, то есть, используя методы при работы с датчиком. Методы Serial.println() и Serial.print() выводят их аргумент на последовательный порт, который можно прослушать с помощью PuTTY или редактора кода для Ардуино.
Не забудьте подключить библиотеки!
Листинг:
#include <lmic.h> #include <hal/hal.h> #include <SPI.h> // LoRaWAN NwkSKey, network session key // This is the default Semtech key, which is used by the prototype TTN // network initially. static const PROGMEM u1_t NWKSKEY[16] = { 0x2B, 0x7E, 0x15, 0x16, 0x28, 0xAE, 0xD2, 0xA6, 0xAB, 0xF7, 0x15, 0x88, 0x09, 0xCF, 0x4F, 0x3B }; // LoRaWAN AppSKey, application session key // This is the default Semtech key, which is used by the prototype TTN // network initially. static const u1_t PROGMEM APPSKEY[16] = { 0x2B, 0x7E, 0x15, 0x16, 0x28, 0xAE, 0xD2, 0xA6, 0xAB, 0xF7, 0x15, 0x88, 0x09, 0xCF, 0x4F, 0x3C }; // LoRaWAN end-device address (DevAddr) static const u4_t DEVADDR = 0x00000012 ; // <-- Change this address for every node! // These callbacks are only used in over-the-air activation, so they are // left empty here (we cannot leave them out completely unless // DISABLE_JOIN is set in config.h, otherwise the linker will complain). void os_getArtEui (u1_t* buf) { } void os_getDevEui (u1_t* buf) { } void os_getDevKey (u1_t* buf) { } static char mydata[] = "Hello, world!"; static osjob_t sendjob; // Schedule TX every this many seconds (might become longer due to duty // cycle limitations). const unsigned TX_INTERVAL = 2; // Pin mapping const lmic_pinmap lmic_pins = { .nss = 6, .rxtx = LMIC_UNUSED_PIN, .rst = 10, .dio = {2, 3, 4}, }; int counter = 0; void onEvent (ev_t ev) { Serial.print(os_getTime()); Serial.print(": "); switch(ev) { case EV_SCAN_TIMEOUT: Serial.println(F("EV_SCAN_TIMEOUT")); break; case EV_BEACON_FOUND: Serial.println(F("EV_BEACON_FOUND")); break; case EV_BEACON_MISSED: Serial.println(F("EV_BEACON_MISSED")); break; case EV_BEACON_TRACKED: Serial.println(F("EV_BEACON_TRACKED")); break; case EV_JOINING: Serial.println(F("EV_JOINING")); break; case EV_JOINED: Serial.println(F("EV_JOINED")); break; case EV_RFU1: Serial.println(F("EV_RFU1")); break; case EV_JOIN_FAILED: Serial.println(F("EV_JOIN_FAILED")); break; case EV_REJOIN_FAILED: Serial.println(F("EV_REJOIN_FAILED")); break; break; case EV_TXCOMPLETE: Serial.println(F("EV_TXCOMPLETE (includes waiting for RX windows)")); if(LMIC.dataLen) { // data received in rx slot after tx Serial.print(F("Data Received: ")); Serial.write(LMIC.frame+LMIC.dataBeg, LMIC.dataLen); Serial.println(); } // Schedule next transmission os_setTimedCallback(&sendjob, os_getTime()+sec2osticks(TX_INTERVAL), do_send); break; case EV_LOST_TSYNC: Serial.println(F("EV_LOST_TSYNC")); break; case EV_RESET: Serial.println(F("EV_RESET")); break; case EV_RXCOMPLETE: // data received in ping slot Serial.println(F("EV_RXCOMPLETE")); break; case EV_LINK_DEAD: Serial.println(F("EV_LINK_DEAD")); break; case EV_LINK_ALIVE: Serial.println(F("EV_LINK_ALIVE")); break; default: Serial.println(F("Unknown event")); break; } } void do_send(osjob_t* j){ // Check if there is not a current TX/RX job running if (LMIC.opmode & OP_TXRXPEND) { Serial.println(F("OP_TXRXPEND, not sending")); } else { // Prepare upstream data transmission at the next possible time. LMIC_setTxData2(1, mydata, sizeof(mydata)-1, 0); Serial.println(F("Packet queued")); } // Next TX is scheduled after TX_COMPLETE event. } void setup() { Serial.begin(115200); Serial.println(F("Starting")); #ifdef VCC_ENABLE // For Pinoccio Scout boards pinMode(VCC_ENABLE, OUTPUT); digitalWrite(VCC_ENABLE, HIGH); delay(1000); #endif // LMIC init os_init(); // Reset the MAC state. Session and pending data transfers will be discarded. LMIC_reset(); // Set static session parameters. Instead of dynamically establishing a session // by joining the network, precomputed session parameters are be provided. #ifdef PROGMEM // On AVR, these values are stored in flash and only copied to RAM // once. Copy them to a temporary buffer here, LMIC_setSession will // copy them into a buffer of its own again. uint8_t appskey[sizeof(APPSKEY)]; uint8_t nwkskey[sizeof(NWKSKEY)]; memcpy_P(appskey, APPSKEY, sizeof(APPSKEY)); memcpy_P(nwkskey, NWKSKEY, sizeof(NWKSKEY)); LMIC_setSession (0x1, DEVADDR, nwkskey, appskey); #else // If not running an AVR with PROGMEM, just use the arrays directly LMIC_setSession (0x1, DEVADDR, NWKSKEY, APPSKEY); #endif // Set up the channels used by the Things Network, which corresponds // to the defaults of most gateways. Without this, only three base // channels from the LoRaWAN specification are used, which certainly // works, so it is good for debugging, but can overload those // frequencies, so be sure to configure the full frequency range of // your network here (unless your network autoconfigures them). // Setting up channels should happen after LMIC_setSession, as that // configures the minimal channel set. LMIC_setupChannel(0, 868100000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band LMIC_setupChannel(1, 868300000, DR_RANGE_MAP(DR_SF12, DR_SF7B), BAND_CENTI); // g-band LMIC_setupChannel(2, 868500000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band LMIC_setupChannel(3, 867100000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band LMIC_setupChannel(4, 867300000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band LMIC_setupChannel(5, 867500000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band LMIC_setupChannel(6, 867700000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band LMIC_setupChannel(7, 867900000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band LMIC_setupChannel(8, 868800000, DR_RANGE_MAP(DR_FSK, DR_FSK), BAND_MILLI); // g2-band // Disable link check validation LMIC_setLinkCheckMode(0); // Set data rate and transmit power (note: txpow seems to be ignored by the library) LMIC_setDrTxpow(DR_SF7,14); // Start job do_send(&sendjob); //os_runloop_once(); } void loop() { os_runloop_once(); } Этот код есть шаблоном для конкретного устройства. В нём вам нужно исправить несколько строк кода в зависимости от датчика и настроек устройств на сервере.
Пример для датчика освещения:
#include <lmic.h> #include <hal/hal.h> #include <SPI.h> #include <stdlib.h> #define PIN_DIGITAL_RAIN_SENSOR 7 // LoRaWAN NwkSKey, network session key static const PROGMEM u1_t NWKSKEY[16] = { 0x2B, 0x7E, 0x15, 0x16, 0x28, 0xAE, 0xD2, 0xA6, 0xAB, 0xF7, 0x15, 0x88, 0x09, 0xCF, 0x4F, 0x3E }; // LoRaWAN AppSKey, application session key static const u1_t PROGMEM APPSKEY[16] = { 0x2B, 0x7E, 0x15, 0x16, 0x28, 0xAE, 0xD2, 0xA6, 0xAB, 0xF7, 0x15, 0x88, 0x09, 0xCF, 0x4F, 0x3D }; // LoRaWAN end-device address (DevAddr) static const u4_t DEVADDR = 0x00000013 ; void os_getArtEui (u1_t* buf) { } void os_getDevEui (u1_t* buf) { } void os_getDevKey (u1_t* buf) { } static char mydata[] = "Packet# 00"; //static char mydata[] = "123456789012345678901234567890123456789012345678901";//51 - доставляет, 52 - отправляет пустое сообщение, 53 - не отправляет static osjob_t sendjob; // Schedule TX every this many seconds (might become longer due to duty // cycle limitations). const unsigned TX_INTERVAL = 5; // Pin mapping const lmic_pinmap lmic_pins = { .nss = 6, .rxtx = LMIC_UNUSED_PIN, .rst = 10, .dio = {2, 3, 4}, }; void onEvent (ev_t ev) { Serial.print(os_getTime()); Serial.print(": "); switch(ev) { case EV_SCAN_TIMEOUT: Serial.println(F("EV_SCAN_TIMEOUT")); break; case EV_BEACON_FOUND: Serial.println(F("EV_BEACON_FOUND")); break; case EV_BEACON_MISSED: Serial.println(F("EV_BEACON_MISSED")); break; case EV_BEACON_TRACKED: Serial.println(F("EV_BEACON_TRACKED")); break; case EV_JOINING: Serial.println(F("EV_JOINING")); break; case EV_JOINED: Serial.println(F("EV_JOINED")); break; case EV_RFU1: Serial.println(F("EV_RFU1")); break; case EV_JOIN_FAILED: Serial.println(F("EV_JOIN_FAILED")); break; case EV_REJOIN_FAILED: Serial.println(F("EV_REJOIN_FAILED")); break; break; case EV_TXCOMPLETE: Serial.println(F("EV_TXCOMPLETE (includes waiting for RX windows)")); if(LMIC.dataLen) { // data received in rx slot after tx Serial.print(F("Data Received: ")); Serial.write(LMIC.frame+LMIC.dataBeg, LMIC.dataLen); Serial.println(); } // Schedule next transmission os_setTimedCallback(&sendjob, os_getTime()+sec2osticks(TX_INTERVAL), do_send); break; case EV_LOST_TSYNC: Serial.println(F("EV_LOST_TSYNC")); break; case EV_RESET: Serial.println(F("EV_RESET")); break; case EV_RXCOMPLETE: // data received in ping slot Serial.println(F("EV_RXCOMPLETE")); break; case EV_LINK_DEAD: Serial.println(F("EV_LINK_DEAD")); break; case EV_LINK_ALIVE: Serial.println(F("EV_LINK_ALIVE")); break; default: Serial.println(F("Unknown event")); break; } } String tempstr=""; void do_send(osjob_t* j){ // Check if there is not a current TX/RX job running if (LMIC.opmode & OP_TXRXPEND) { Serial.println(F("OP_TXRXPEND, not sending")); } else { int sensorValue = digitalRead(PIN_DIGITAL_RAIN_SENSOR); // Считываем данные с цифрового порта tempstr = "IsDark?: " + String(sensorValue); tempstr.toCharArray(mydata, 20); Serial.println(F("Packet queued")); Serial.print(F("Sent payload: ")); Serial.println(mydata); LMIC_setTxData2(1, mydata, sizeof(mydata)-1, 0); } // Next TX is scheduled after TX_COMPLETE event. } void setup() { Serial.begin(115200); Serial.println(F("Starting")); #ifdef VCC_ENABLE // For Pinoccio Scout boards pinMode(VCC_ENABLE, OUTPUT); digitalWrite(VCC_ENABLE, HIGH); delay(1000); #endif // LMIC init os_init(); // Reset the MAC state. Session and pending data transfers will be discarded. LMIC_reset(); // Set static session parameters. Instead of dynamically establishing a session // by joining the network, precomputed session parameters are be provided. #ifdef PROGMEM // On AVR, these values are stored in flash and only copied to RAM // once. Copy them to a temporary buffer here, LMIC_setSession will // copy them into a buffer of its own again. uint8_t appskey[sizeof(APPSKEY)]; uint8_t nwkskey[sizeof(NWKSKEY)]; memcpy_P(appskey, APPSKEY, sizeof(APPSKEY)); memcpy_P(nwkskey, NWKSKEY, sizeof(NWKSKEY)); LMIC_setSession (0x1, DEVADDR, nwkskey, appskey); #else // If not running an AVR with PROGMEM, just use the arrays directly LMIC_setSession (0x1, DEVADDR, NWKSKEY, APPSKEY); #endif // Set up the channels used by the Things Network LMIC_setupChannel(0, 868900000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band LMIC_setupChannel(1, 869100000, DR_RANGE_MAP(DR_SF12, DR_SF7B), BAND_CENTI); // g-band LMIC_setupChannel(2, 864100000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band LMIC_setupChannel(3, 864300000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band LMIC_setupChannel(4, 864500000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band LMIC_setupChannel(5, 864700000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band LMIC_setupChannel(6, 864900000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band LMIC_setupChannel(7, 866100000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band LMIC_setupChannel(8, 866300000, DR_RANGE_MAP(DR_FSK, DR_FSK), BAND_MILLI); // g2-band // Disable link check validation LMIC_setLinkCheckMode(0); // Set data rate and transmit power (note: txpow seems to be ignored by the library) LMIC_setDrTxpow(DR_SF7,14); // Start job do_send(&sendjob); } void loop() { os_runloop_once(); }
ссылка на оригинал статьи https://habr.com/ru/post/678312/
Добавить комментарий