Как создать приложение с открытым кодом для планирования пеших походов и выбора оптимального маршрута?

Любой заядлый турист знает: всё, что ждёт его в походе, зависит от подготовки. Брать ли дождевики? Сколько идти от одного источника воды до другого? Где лучше ночевать в этой местности в это время года? Но самый важный вопрос звучит проще простого: «Что я там буду делать?» Отвечаем на эти вопросы к старту нашего курса по Fullstack-разработке на Python.
В путеводителе можно прочесть об основных достопримечательностях конкретного парка или региона, но информация в них может устареть и не иметь ничего общего с вашими пожеланиями. Такие приложения, как AllTrails, совершили революцию в планировании походов. В них собраны данные о популярных маршрутах, фотографии и отзывы. Однако многие из их «премиум-функций», например распечатка или скачивание карт, требуют платной подписки. Кроме того, из сложной сети маршрутов они выжимают всего несколько подобранных предложений. Иногда мне кажется, что AllTrails ограничивает меня в выборе.
Поэтому я решил создать собственное приложение для планирования походов с открытым исходным кодом и механизмом оптимизации маршрута, которое дополнит функционал коммерческих сайтов. В этой статье я проложу (простите за каламбур) кратчайший маршрут по всем независимым компонентам системы и покажу их в совокупности в демоверсии. Хотите увидеть код? Добро пожаловать в реп — вот сюда.
Источники данных
Когда нужны бесплатные данные для выбора маршрута, очевидный выбор — карты OpenStreetMap. Даже AllTrails берёт именно их базу дорог через Overpass API и отсеивает автомобильные дороги, оставляя туристические тропы.
Для визуализации и анализа карт в своём проекте я использовал разные структуры данных. А боль всякого, кто работал с геоданными, — многообразие форматов файлов. У каждого есть свои достоинства и недостатки.
Как и все дороги, туристические тропы имеют перекрёстки (вершины графа) и отрезки пути (рёбра графа). А значит, для выбора оптимального маршрута разумно использовать метод графов, например алгоритм Дейкстры.
Америку я вам тут не открою, ведь обучающих материалов и библиотек по построению маршрута на графах создано великое множество. Такие пакеты, как OSMnx, позволяют формировать высокоуровневые запросы к наборам данных OSM по геокоду (например, «Shenandoah National Park, Virginia, USA») и конвертировать результат в графы NetworkX.
Вот листинг функции load_map, с помощью которой я получил данные о тропах и сохранял их в виде графов (для эффективного расчёта) и файлов GeoJSON (для визуализации).
def load_map(place: str, graph_only: bool = False) -> (nx.MultiDiGraph, dict): """ Load OSM trail data for a given region. Initially check if the graph has already been cached on disk, otherwise it will be downloaded. Args: place: The geocode of the region of interest, e.g. 'Shenandoah National Park, Virginia, USA' graph_only: If true, return only the NetworkX graph, not the geojson. Returns: The dataset as a NetworkX MultiGraph, the nodes geojson, the edges geojson """ filename = p.sub("", place).lower().replace(" ", "_") graph_fp = f"static/graphs/{filename}.graphml" edges_fp = f"static/edges/{filename}.geojson" nodes_fp = f"static/nodes/{filename}.geojson" try: G = ox.load_graphml(graph_fp) print("Graph loaded from disk") except FileNotFoundError: print("Downloading and caching graph from OSM") # custom filter to only include walkable segments - see: https://support.alltrails.com/hc/en-us/articles/360019246411-OSM-Derivative-Database-Derivation-Methodology cf = '["highway"~"path|track|footway|steps|bridleway|cycleway"]' G = ox.graph_from_place(place, custom_filter=cf) ox.save_graphml(G, graph_fp) if graph_only: return G if os.path.isfile(edges_fp) is False or os.path.isfile(nodes_fp) is False: # convert Graph to GeoDataFrames and save as GeoJSON nodes, edges = ox.graph_to_gdfs(G) edges = edges[["name", "geometry", "length"]] edges["name"] = edges["name"].apply(lambda x: x[0] if type(x) is list else x) edges.to_file(edges_fp) nodes.to_file(nodes_fp) with open(nodes_fp, "r") as f: nodes = json.load(f) with open(edges_fp, "r") as f: edges = json.load(f) for feat in edges["features"]: # add custom tooltip property for Leaflet visualization tooltip = f"{feat['properties']['name']}, {round(feat['properties']['length'] / 1609, 1)} mi" feat["properties"]["tooltip"] = tooltip return G, nodes, edges Уникальное отличие пешеходных маршрутов — в том, что, помимо широты и долготы, при их построении нужно учитывать высоту над уровнем моря. Как и любая хорошая туристическая карта, наша программа должна освоить все топографические особенности местности.
Мой пользовательский API определяет высоты по точным радиолокационным данным 2000 года с шаттла Endeavor. При объёме данных около 18 Гб SRTM GL3 покрывает почти 120 км2 суши с шагом в 90 м. Библиотека rasterio позволяет извлекать профили рельефа из отрезков пути, но не загружать в память всю карту:
def get_elevation_profile_of_segment(dataset: rasterio.DatasetReader, coords: list[list]): """ Get the elevation profile (distance vs. altitude) of a path segment from the list of coordinates. Args: dataset: The opened rasterio dataset for the SRTM global topography data. coords: The path coordinates in [[lon1, lat1], [lon2, lat2], ...] format. Returns: The distance (in miles) and elevation (in feet) vectors. """ # coordinates are [lon, lat], flip for rasterio coords = [[c[1], c[0]] for c in coords] # convert meters to feet and use rasterio.sample.sample_gen to query each point elev = [e[0] * 3.28084 for e in sample_gen(dataset, coords)] d = [0.0] for j in range(len(coords) - 1): # use haversine distance d.append(d[j] + haversine((coords[j][1], coords[j][0]), (coords[j + 1][1], coords[j + 1][0]), Unit.MILES)) return d, elev Неплохо, да? Кстати, Google берёт 5 баксов за 1000 запросов к своему Elevation API, но NASA и несколько строчек кода позволяют получить столь же качественные данные совершенно бесплатно.
Приложение и пользовательский интерфейс
Dash — моя любимая среда создания интерактивных дашбордов на Python. Её интерфейс состоит из настраиваемых элементов, поэтому при анализе данных можно сосредоточиться на функциях, а не на дизайне. Есть десятки отличных руководств по Dash с примерами, поэтому давайте перейдём сразу к интерфейсу и логике приложения:
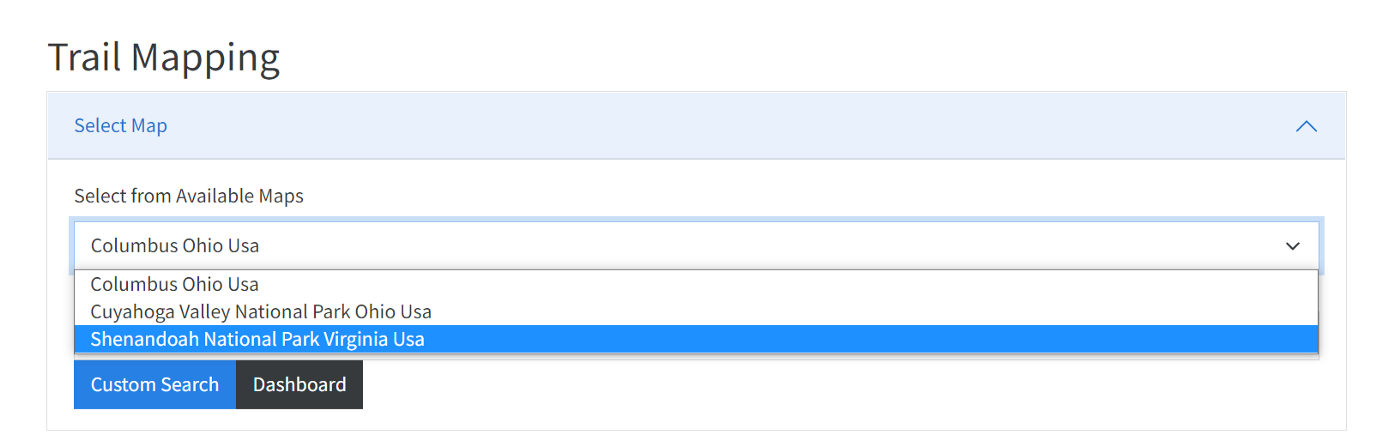
Как и следовало ожидать, интерфейс построен вокруг карты с набором топографических тайлов Mapbox. Выпадающий список позволяет выбирать системы троп из кеша или загружать новые по геокоду:
def layout(place=None): if place: global G, G2 G, _, edges = load_map(place) G2 = nx.Graph(G) polyline = dl.Polyline(id="route-line", positions=[], color="red", weight=10, fillColor="red", fillOpacity=1.0) patterns = [dict(repeat='100', arrowHead=dict(pixelSize=15, polygon=False, pathOptions=dict(color="red", stroke=True)), line=dict(pixelSize=10, pathOptions=dict(color='#f00', weight=20)))] route_decorator = dl.PolylineDecorator(id="route-arrows", positions=[], patterns=patterns) url = "https://api.mapbox.com/styles/v1/mapbox/outdoors-v9/tiles/{z}/{x}/{y}?access_token=" + open(".mapbox_token").read() attribution = '© <a href="https://openstreetmap.org/">OpenStreetMap</a> | © <a href="https://mapbox.com/">Mapbox</a> ' res = html.Div([ html.Div([ dbc.Label("Choose Mode"), dbc.RadioItems( options=[ {"label": "Auto", "value": 1}, {"label": "Custom", "value": 2} ], value=1, id="mode-select" ) ]), dbc.Label("Distance Target (mi)", html_for="distance-target"), dbc.Input(id="distance-target", value=10, required=True, type="number", min=0), dbc.Label("Elevation Minimum (ft)", html_for="elevation-min"), dbc.Input(id="elevation-min", value=0, required=True, type="number", min=0), dl.Map([dl.TileLayer(url=url, attribution=attribution), polyline, dl.GeoJSON(data=edges, zoomToBounds=True, id="trail", hoverStyle=arrow_function(dict(weight=5, color='#666', dashArray=''))), # polyline, route_decorator ], id="map", style={'width': '100%', 'height': '40vh', 'margin': "auto", "display": "block", "padding-top": "10px"}), dbc.Button(id="reset-btn", children="Reset", className="btn btn-danger"), dbc.Button(id="download-btn", children="Export Route"), dcc.Download(id="download-route"), # dbc.Button(id="undo-btn", children="Undo"), html.Br(), html.P(id="total-distance"), html.P(id="elevation-gain"), dcc.Graph(id="profile"), dcc.Store(id="route-path", data=[]), dcc.Store(id="map-data", data={"edges": edges}) ], style={"padding-top": "10px"}) return res else: return html.Div("issue") После выбора региона сеть троп OSM визуализируется с помощью библиотеки dash-leaflet. При генерации маршрута на двухмерной карте в реальном времени строится и соответствующий профиль высот:
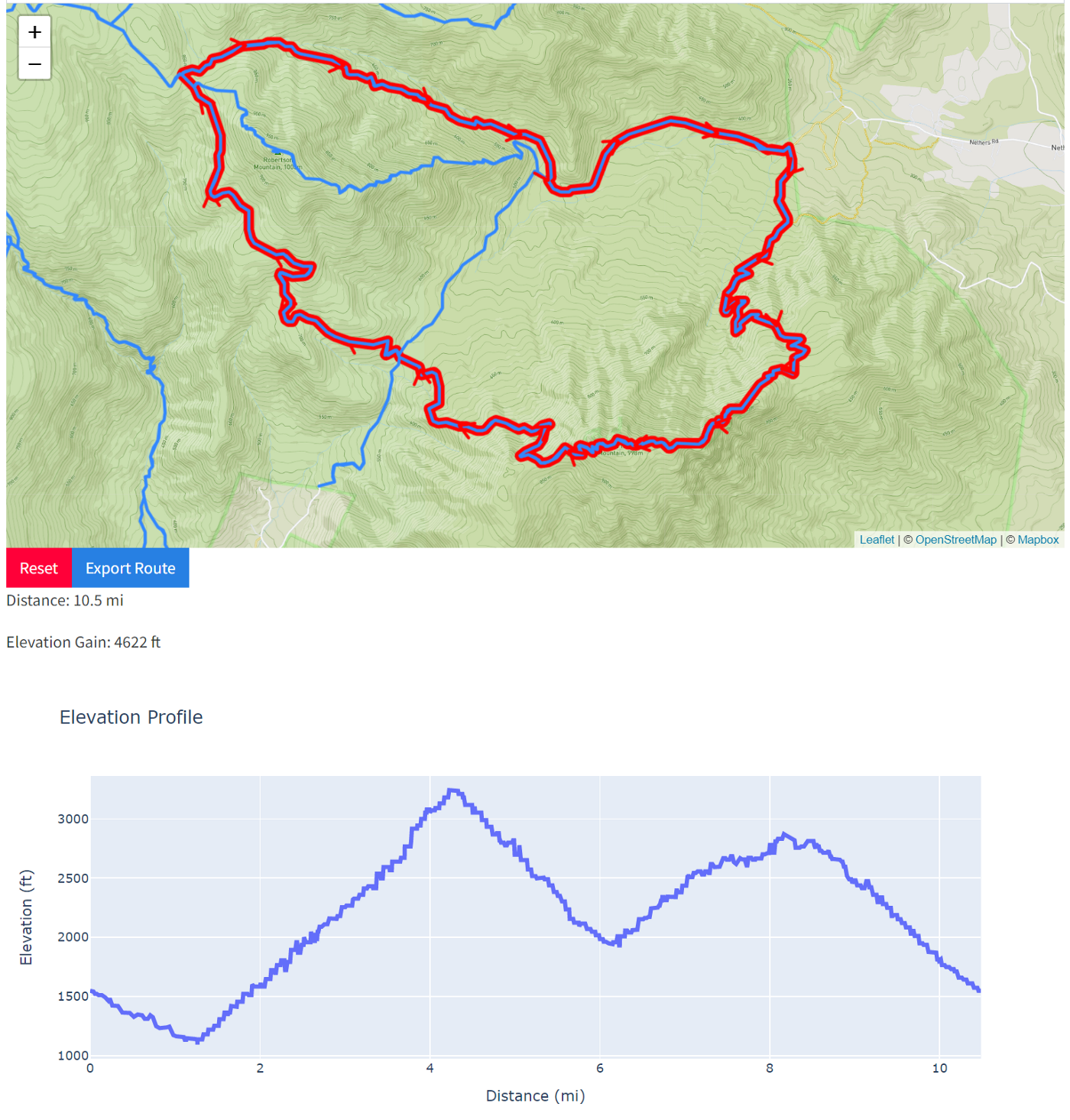
Просмотр трёх направлений петли вокруг горы Олд Рэг в национальном парке Шенандоа (от автора)
Движок планирования маршрута
Моё приложение позволяет планировать походы в двух режимах. В режиме по умолчанию вы просто нажимаете на пересечения троп на карте и видите, как ваш маршрут «оживает» сегмент за сегментом. В это время программа соединяет точки с помощью алгоритма кратчайшего пути. Вот анимация создания произвольного маршрута по национальному парку Кайахога:

Поэтапное планирование маршрута по национальному парку Кайахога (от автора)
Автоматический режим выглядит чуть интереснее. В нём решено ввести ограничивающие условия для учёта основных факторов, которые не хотелось бы упускать из виду. Вот эти факторы:
- Прирост высоты (постоянно возрастающий).
- Расстояние.
- Движение по как можно более уникальному маршруту (возвращения к пройденным участкам пути на протяжении всего похода сводятся к минимуму).
С точки зрения математики оптимальный замкнутый путь должен отвечать следующим условиям:
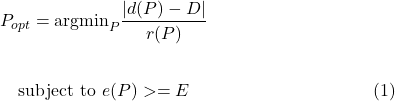
Здесь  — это путь,
— это путь,  — проходимое расстояние,
— проходимое расстояние,  — целевое расстояние,
— целевое расстояние,  — дробная доля уникальных участков (если идти по одному пути туда и обратно, то эта доля равна 0,5),
— дробная доля уникальных участков (если идти по одному пути туда и обратно, то эта доля равна 0,5),  — прирост высоты на протяжении всего пути, а
— прирост высоты на протяжении всего пути, а  — целевой прирост высоты.
— целевой прирост высоты.
Поиск доступных циклов при обходе циклического графа — задача, безусловно, нетривиальная. Для её решения я выбрал метод, сочетающий кратчайшие пути и простые циклы. Таким циклами можно считать пути без повторяющихся участков.
def find_best_loop(G: nx.Graph, root, target_dist, tol=1.0, min_elev: Optional[Union[int, float]] = None, dataset: Optional[rasterio.DatasetReader] = None): if min_elev and not dataset: raise ValueError("If asking for elevation data, you must include a rasterio dataset") error = 1e8 best_path = [] for n in G.nodes(): if nx.has_path(G, root, n): shortest_path = nx.shortest_path(G, root, n) paths = nx.all_simple_paths(G, root, n, cutoff=10) for path in paths: if path == shortest_path: continue path_loop = path + nx.shortest_path(G, n, root, weight="length")[1:] path_diversity = len(set(path_loop)) / len(path_loop) dist = path_length(G, path_loop) e_new = np.abs(dist - target_dist) / path_diversity if e_new < error: error = e_new best_path = path_loop if error < tol: if min_elev: coords_list = path_to_coords_list(G, path_loop) _, elev = get_elevation_profile_of_segment(dataset, coords_list) elev_gain = elevation_gain(elev) if elev_gain < min_elev: continue return best_path return best_path Клик по карте вблизи пересечения троп определяет корневой узел функции find_best_loop — конечную точку маршрута. Пользователи могут генерировать пешеходные маршруты, которые начинаются и заканчиваются в заданном месте. Это может быть автостоянка или перевалочный пункт. Ниже вы увидите алгоритм, который генерирует суровый марш-бросок с восхождением на Олд Рэг в национальном парке Шенандоа. Здесь выбранные ограничения будут очень кстати.
Используем алгоритм оптимизации и пользовательские ограничения и генерируем идеальный маршрут (от автора)
Ещё одна интересная штука по поводу прироста высоты… Как ни странно, строгого математического определения у него нет. Представляете, что будет, если включать сюда каждый участок с положительным наклоном — даже если он почти плоский? Тогда любая ухабистая дорога на пути существенно повысит это значение. Чтобы сгладить кривые высот, введём вертикальный порог высоты. Это пользовательский гиперпараметр. Он описывается в этой статье.
В статье по ссылке нет термина «rolling threshold», о котором говорит автор, но есть термин «trackpoint elevation threshold» в разделе «Reducing vertical noise». Дано описание «instead of looking at horizontal distance, it only counts elevation changes once they’ve passed a certain vertical threshold». Поэтому термин перевёл как «вертикальный порог», так будет просто и понятно
Экспорт маршрута в инструменты навигации
Если вы планируете идеальный поход, формат на выходе тоже лучше сделать удобным и подходящим для ориентирования при любых обстоятельствах. Бумажную версию карты и профиля высот можно распечатать прямо из пользовательского интерфейса.
Пользователи также могут экспортировать свои маршруты в GPX (ещё один формат геоданных) и заливать в AllTrails, Gaia, Google Maps и другие приложения с отслеживанием через GPS.
Экспорт маршрута в файл GPX и его загрузка в AllTrails (от автора)
Теперь вы можете выполнять навигацию по вашему личному маршруту с телефона, как по базовому маршруту AllTrails!
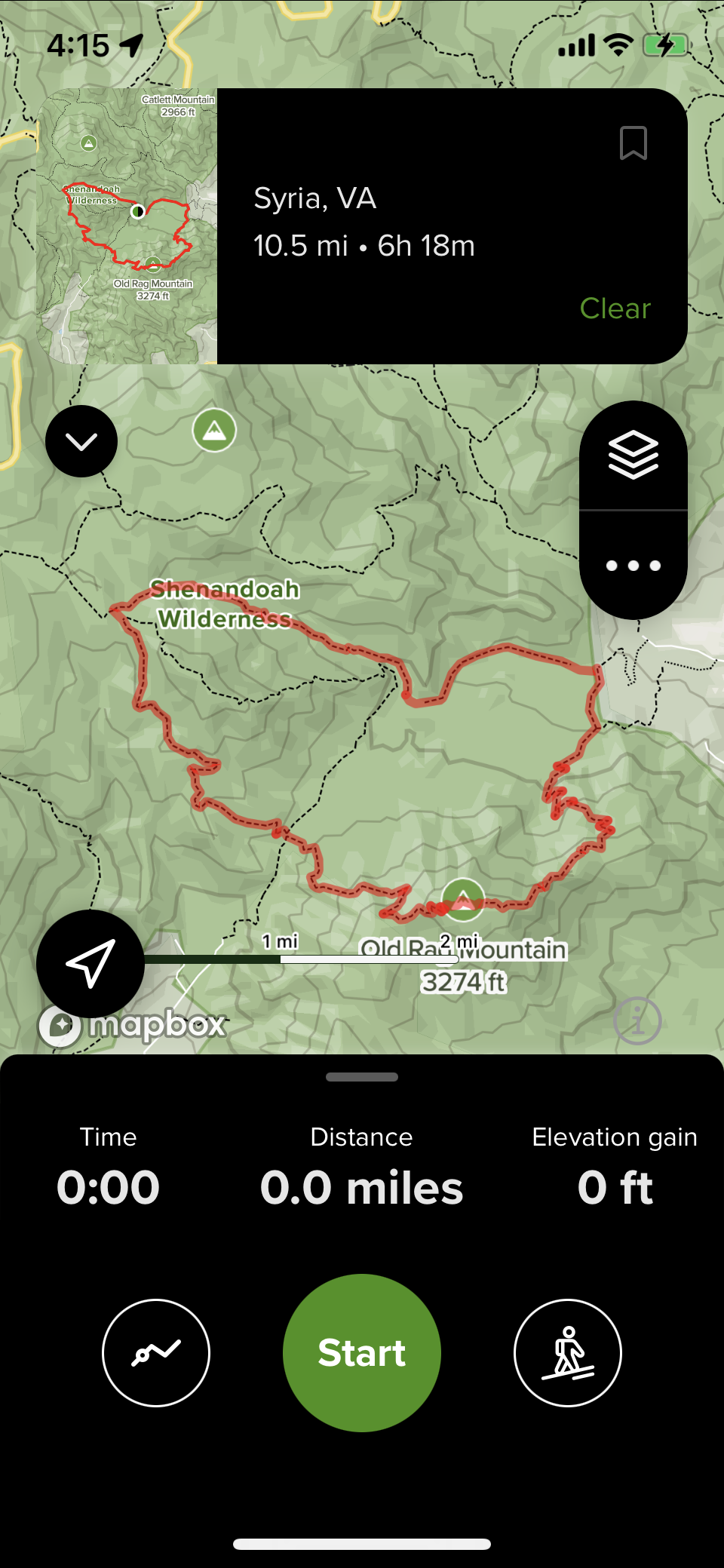
Проследил свой поход с помощью мобильного приложения AllTrails (от автора)
Пора сворачиваться…
В этом демо мы использовали географические данные из открытых источников — OSM и NASA — для создания приложения с удобным функционалом для планирования походов. На стыке теории графов, численного анализа и своего опыта мы разработали математически обоснованный механизм оптимизации маршрута для автоматического поиска циклических маршрутов, отвечающих целям конкретного путешественника.
С нетерпением жду обновления пользовательского интерфейса и базовых алгоритмов. Если вы любите запускать код сами, посмотрите весь репозиторий на Github.
Map data copyrighted OpenStreetMap contributors and available from https://www.openstreetmap.org
NASA Shuttle Radar Topography Mission (SRTM)(2013). Shuttle Radar Topography Mission (SRTM) Global. Distributed by OpenTopography. https://doi.org/10.5069/G9445JDF. Accessed: 2022–08–30
Прокачаться или стать востребованным профессионалом в IT с самого начала помогут наши курсы:

ссылка на оригинал статьи https://habr.com/ru/company/skillfactory/blog/686688/
Добавить комментарий