На прошлом уроке мы углубились в изучение контуров. В частности, научились работать со структурой, которую возвращает функция выделения контуров, научились аппроксимировать и обходить контур, научились программировать кое-какие геометрические операции, чтобы создать инвариантное описание объекта. Напомню, как это мы сделали: нашли контур объекта, аппроксимировали его, обошли этот контур, вычислили косинусы углов между гранями аппроксимированного контура.
Сегодня продолжим тему прошлого урока. Вычислим инвариантный вектор новым методом: через отношения длин сторон. Мы начнем обход так же с самой удаленной от центра точки, только будем брать стороны, а не углы межу сторонами. И первая сторона это та, что прилегает к первой точке. То есть она соединяет первую точку и следующую за ней по часовой стрелке. И все эти длины сторон мы разделим на самую длинную сторону. Хотя нет, сделам лучше. Сделаем минимакс нормализацию: вычтем из длины стороны минимум и разделим на разницу между минимумом и максимумом. У нас будет вектор чисел от 0 до 1.
И так, займемся кодингом. Сначала напишем цикл, создающий исходный масcив:
lengths=[] for i in range(size-1): lengths.append(get_length(polar_coordinates[i],polar_coordinates[i+1])) lengths.append(get_length(polar_coordinates[size-1],polar_coordinates[0])) print(get_normalize_normalize(lengths))Функция вычисления длины стороны (она просто извекает из структуры, где у нас все храниться, координаты и считает эвклидово расстояние):
#Эвклидово расстояние между двумя элементами def get_length(item1, item2): _, point1 = item1 _, point2 = item2 x1, y1 = point1 x2, y2 = point2 dx=x1-x2 dy=y1-y2 r=math.sqrt(dx*dx+dy*dy) return rНу и нормализация, конвертим полученный список в numpy массив и делаем минимакс нормализацию:
def get_normalized_vector(list): arr=np.array(list) return (arr-arr.min())/(arr.max()-arr.min())Поехали смотреть, что получилось.
Первый пример:
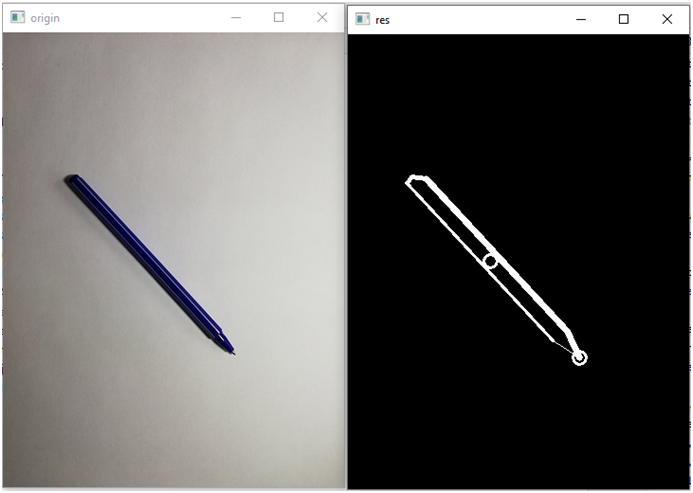
Вектор: [0.11331868 1. 0. 0.02997931 0.96756226 0.1022278 ]
Второй пример:
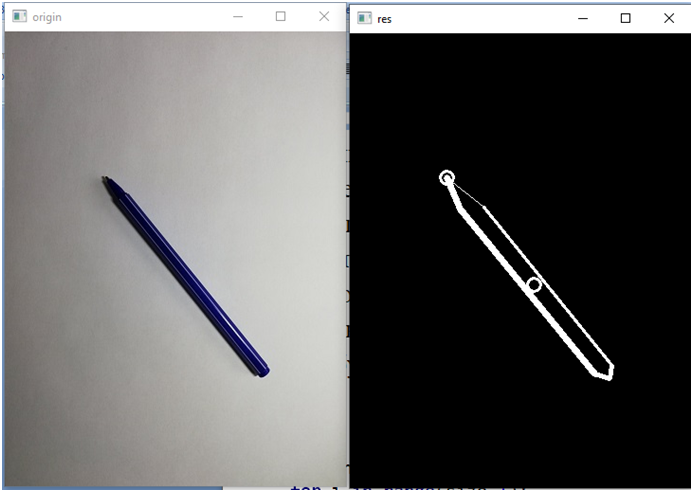
Вектор: [0.16953268 0.9532099 0. 0.01245409 1. 0.10313678]
Как видим, векторы действительно оказались близкие. Причем, в отличие от прошлого варианта, у нас остаются стабильными все элементы вектора.
Вообще, по-хорошему, конечно надо бы провести исследование: проанализировать множество изображений, сравнить, насколько расходятся векторы инвариантных описаний при том или ином методе расчета. Да и программа нуждается в рефакторинге. Но это уже выходит за рамки уроков. Поэтому я привожу полный код примеров как есть, и мы двигаемся дальше:
import cv2 import numpy as np import math import os img = cv2.imread("Samples/1.jpg") gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) thresh = 100 def custom_sort(countour): return -countour.shape[0] def polar_sort(item): return item[0][0] def get_normalized_vector(list): arr=np.array(list) return (arr-arr.min())/(arr.max()-arr.min()) #Эвклидово расстояние между двумя элементами def get_length(item1, item2): _, point1 = item1 _, point2 = item2 x1, y1 = point1 x2, y2 = point2 dx=x1-x2 dy=y1-y2 r=math.sqrt(dx*dx+dy*dy) return r def get_cos_edges(edges): dx1, dy1, dx2, dy2=edges r1 = math.sqrt(dx1 * dx1 + dy1 * dy1) r2 = math.sqrt(dx2 * dx2 + dy2 * dy2) return (dx1*dx2+dy1*dy2)/r1/r2 def get_polar_coordinates(x0,y0,x,y,xc,yc): #Первая координата в полярных координатах - радиус dx=xc-x dy=yc-y r=math.sqrt(dx*dx+dy*dy) #Вторая координата в полярных координатах - узел, вычислим относительно начальной точки dx0=xc-x0 dy0=yc-y0 r0 = math.sqrt(dx0 * dx0 + dy0 * dy0) scal_mul=dx0*dx+dy0*dy cos_angle=scal_mul/r/r0 sgn=dx0*dy-dx*dy0 #опредедляем, в какую сторону повернут вектор if cos_angle>1: if cos_angle>1.0001: raise Exception("Что-то пошло не так") cos_angle=1 angle=math.acos(cos_angle) if sgn<0: angle=2*math.pi-angle return angle,r def get_coords(item1, item2, item3): _, point1 = item1 _, point2 = item2 _, point3 = item3 x1, y1 = point1 x2, y2 = point2 x3, y3 = point3 dx1=x1-x2 dy1=y1-y2 dx2=x3-x2 dy2=y3-y2 return dx1,dy1,dx2,dy2 #get threshold image ret,thresh_img = cv2.threshold(gray, thresh, 255, cv2.THRESH_BINARY) # find contours without approx contours,_ = cv2.findContours(thresh_img,cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE) contours=list(contours) contours.sort(key=custom_sort) sel_countour=contours[1] # calc arclentgh arclen = cv2.arcLength(sel_countour, True) # do approx eps = 0.01 epsilon = arclen * eps approx = cv2.approxPolyDP(sel_countour, epsilon, True) sum_x=0.0 sum_y=0.0 for point in approx: x = float(point[0][0]) y = float(point[0][1]) sum_x+=x sum_y+=y xc=sum_x/float(len((approx))) yc=sum_y/float(len((approx))) max=0 beg_point=-1 for i in range(0,len(approx)): point=approx[i] x = float(point[0][0]) y = float(point[0][1]) dx=x-xc dy=y-yc r=math.sqrt(dx*dx+dy*dy) if r>max: max=r beg_point=i polar_coordinates=[] x0=approx[beg_point][0][0] y0=approx[beg_point][0][1] for point in approx: x = int(point[0][0]) y = int(point[0][1]) angle,r=get_polar_coordinates(x0,y0,x,y,xc,yc) polar_coordinates.append(((angle,r),(x,y))) polar_coordinates.sort(key=polar_sort) img_contours = np.uint8(np.zeros((img.shape[0],img.shape[1]))) size=len(polar_coordinates) for i in range(1,size): _ , point1=polar_coordinates[i-1] _, point2 = polar_coordinates[i] x1,y1=point1 x2,y2=point2 cv2.line(img_contours, (x1, y1), (x2, y2), 255, thickness=i) _ , point1=polar_coordinates[size-1] _, point2 = polar_coordinates[0] x1,y1=point1 x2,y2=point2 cv2.line(img_contours, (x1, y1), (x2, y2), 255, thickness=size) cv2.circle(img_contours, (int(xc), int(yc)), 7, (255,255,255), 2) coses=[] coses.append(get_cos_edges(get_coords(polar_coordinates[size-1],polar_coordinates[0],polar_coordinates[1]))) for i in range(1,size-1): coses.append(get_cos_edges(get_coords(polar_coordinates[i-1], polar_coordinates[i],polar_coordinates[i+1]))) coses.append(get_cos_edges(get_coords(polar_coordinates[size-2], polar_coordinates[size-1],polar_coordinates[0]))) print(coses) lengths=[] for i in range(size-1): lengths.append(get_length(polar_coordinates[i],polar_coordinates[i+1])) lengths.append(get_length(polar_coordinates[size-1],polar_coordinates[0])) print(get_normalized_vector(lengths)) point=approx[beg_point] x = float(point[0][0]) y = float(point[0][1]) cv2.circle(img_contours, (int(x), int(y)), 7, (255,255,255), 2) cv2.imshow('origin', img) # выводим итоговое изображение в окно cv2.imshow('res', img_contours) # выводим итоговое изображение в окно cv2.waitKey() cv2.destroyAllWindows()Наш следующий шаг в освоении OpenCV – это поиск предмета на изображении. Искать мы будет все ту же ручку, но теперь на изображении у нас будут другие предметы:

Здесь мы точно так же выделим контуры на изображении, а потом каждый из контуров будем проверять на соответствии заданному шаблону – шесть граней и вектор инвариантного описания близок к исходному. Насколько близок? Это определим эмпирическим путем, подбирая порог.
И так, вот программа:
import cv2 import numpy as np import math template_vector=np.array([0.16953268, 0.9532099, 0, 0.01245409, 1, 0.10313678]) distance_thresh=0.1 img = cv2.imread("Samples/objects.jpg") gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) thresh = 100 def polar_sort(item): return item[0][0] def get_normalized_vector(list): arr=np.array(list) return (arr-arr.min())/(arr.max()-arr.min()) #Эвклидово расстояние между двумя элементами def get_length(item1, item2): _, point1 = item1 _, point2 = item2 x1, y1 = point1 x2, y2 = point2 dx=x1-x2 dy=y1-y2 r=math.sqrt(dx*dx+dy*dy) return r def get_polar_coordinates(x0,y0,x,y,xc,yc): #Первая координата в полярных координатах - радиус dx=xc-x dy=yc-y r=math.sqrt(dx*dx+dy*dy) #Вторая координата в полярных координатах - узел, вычислим относительно начальной точки dx0=xc-x0 dy0=yc-y0 r0 = math.sqrt(dx0 * dx0 + dy0 * dy0) scal_mul=dx0*dx+dy0*dy cos_angle=scal_mul/r/r0 sgn=dx0*dy-dx*dy0 #опредедляем, в какую сторону повернут вектор if cos_angle>1: if cos_angle>1.0001: raise Exception("Что-то пошло не так") cos_angle=1 angle=math.acos(cos_angle) if sgn<0: angle=2*math.pi-angle return angle,r #get threshold image ret,thresh_img = cv2.threshold(gray, thresh, 255, cv2.THRESH_BINARY) # find contours without approx contours,_ = cv2.findContours(thresh_img,cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE) for sel_countour in contours: # calc arclentgh arclen = cv2.arcLength(sel_countour, True) # do approx eps = 0.01 epsilon = arclen * eps approx = cv2.approxPolyDP(sel_countour, epsilon, True) #Обрабатываем только контуры длиной 6 углов if len(approx)==6: # вычислим центр тяжести контура sum_x = 0.0 sum_y = 0.0 for point in approx: x = float(point[0][0]) y = float(point[0][1]) sum_x += x sum_y += y xc = sum_x / float(len((approx))) yc = sum_y / float(len((approx))) #найдем начальную точку max = 0 beg_point = -1 for i in range(0, len(approx)): point = approx[i] x = float(point[0][0]) y = float(point[0][1]) dx = x - xc dy = y - yc r = math.sqrt(dx * dx + dy * dy) if r > max: max = r beg_point = i #Вычислми полярные координаты polar_coordinates=[] x0=approx[beg_point][0][0] y0=approx[beg_point][0][1] for point in approx: x = int(point[0][0]) y = int(point[0][1]) angle, r = get_polar_coordinates(x0, y0, x, y, xc, yc) polar_coordinates.append(((angle, r), (x, y))) #Создадим вектор описание polar_coordinates.sort(key=polar_sort) size = len(polar_coordinates) lengths = [] for i in range(size - 1): lengths.append(get_length(polar_coordinates[i], polar_coordinates[i + 1])) lengths.append(get_length(polar_coordinates[size - 1], polar_coordinates[0])) descr=get_normalized_vector(lengths) #Вычислим эвклидово расстояние square = np.square(descr - template_vector) sum_square = np.sum(square) distance = np.sqrt(sum_square) if distance<distance_thresh: for i in range(1, size): _, point1 = polar_coordinates[i - 1] _, point2 = polar_coordinates[i] x1, y1 = point1 x2, y2 = point2 cv2.line(img, (x1, y1), (x2, y2), (0,0,255), thickness=4) _, point1 = polar_coordinates[size - 1] _, point2 = polar_coordinates[0] x1, y1 = point1 x2, y2 = point2 cv2.line(img, (x1, y1), (x2, y2), (0,0,255), thickness=size) cv2.imshow('origin', img) # выводим итоговое изображение в окно cv2.waitKey() cv2.destroyAllWindows()Порог подобран 0.1, шаблон – вектор ко второй картинке, где искомый объект повернут в другую сторону, чем тот, что на картинке:
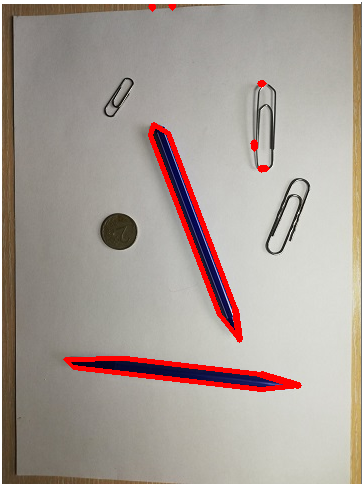
template_vector=np.array([0.16953268, 0.9532099, 0, 0.01245409, 1, 0.10313678]) distance_thresh=0.1И вот что у нас получилось:

Найден всего один объект. Если порог увеличить до 0.4, то будет найдет и второй объект, но еще несколько «левых» объектов:
Избавить мы можем от них, просто введя критерий размера (не имеет смысл рассматривать слишком малые объекты):
… for sel_countour in contours: # calc arclentgh arclen = cv2.arcLength(sel_countour, True) if arclen<20: continue …И вот что мы получим теперь:

Но кто сказал, что надо вообще аппроксимировать контур и считать углы? Мы можем просто обойти контур по кругу, который разделим на определенное кол-во секторов:
count=100 full_angle=2*math.pi i=1 end_angle = float(i) * full_angle / float(count) summ=0.0 count_angles=0.0 signature=[] for item_coord in polar_coord: angle,r=item_coord if angle>end_angle: signature.append((angle,summ/count_angles)) i+=1 end_angle = float(i) * full_angle / float(count) summ=0 count_angles=0 summ+=r count_angles+=1 signature.append((angle,summ/count_angles)) print(signature)Для того, чтобы проверить правильность формирования сигнатуры, переведем ее опять в декартовы координаты и отобразим. Функция перевода полярных координат в декартовы:
def polar_to_decart(angle,r): x=math.sin(angle)*r y=math.cos(angle)*r return x,yИ вот таким образом мы отобразим сигнатуру:
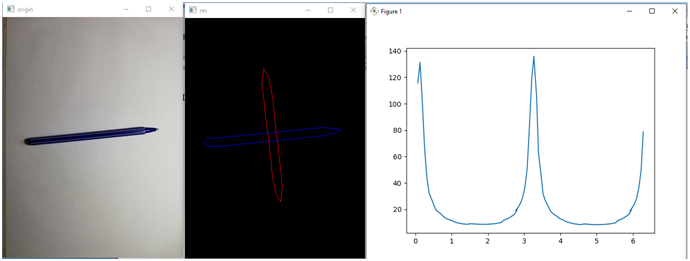
img_contours = np.zeros((img.shape[0],img.shape[1],3), np.uint8) # np.uint8(np.zeros((img.shape[0],img.shape[1]))) cv2.drawContours(img_contours, [sel_countour], -1, (255,0,0), 1) for i in range(1,len(signature)): angle1,r1=signature[i-1] angle2,r2=signature[i] x1, y1=polar_to_decart(angle1,r1) x2, y2 = polar_to_decart(angle2, r2) cv2.line(img_contours, (int(x1+xc), int(y1+yc)), (int(x2+xc), int(y2+yc)), (0,0,255), thickness=1) angle1,r1=signature[len(signature)-1] angle2,r2=signature[0] x1, y1=polar_to_decart(angle1,r1) x2, y2 = polar_to_decart(angle2, r2) cv2.line(img_contours, (int(x1+xc), int(y1+yc)), (int(x2+xc), int(y2+yc)), (0,0,255), thickness=1)Да, я специально не стал делать поправку на угол, чтобы совмещать контуры, пусть красный контур (сигнатура) будет повернут, чтобы было лучше видно:

Можно отобразить эту сигнатуру на графике:
x=[] y=[] for item in signature: angle,r=item x.append(angle) y.append(r) plt.plot(x,y) plt.show()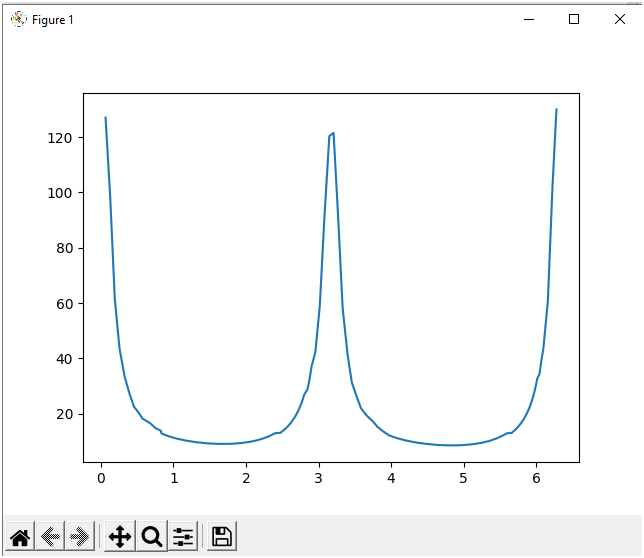
Заметим, что неважно, какой угол поворота, графики будут выглядеть одинаково:


Ну, или почти одинаково:
Сравнить мы его сможет так же, как и вектора. Тем более, что теперь у нас контур приведен к единоразмерной сигнатуре.
Попробуем другой предмет:
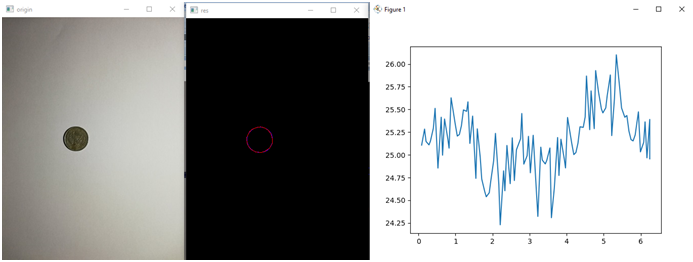
Как видим, в случае круглого предмета получился шум вокруг определенного уровня — радиуса этого круга. В идеале должна, конечно, получиться прямая, но ничего в этом мире нет идеального.
Еще один предмет:

Еще сигнатуру можно нормировать, тогда мы получим инвариантный к размеру вектор. В прошлый раз мы использовали минимакс, но есть и другие способы, например, можно разделить на радиус или делить разницу между текущим и средним значением на среднеквадратическое отклонение. Но обсуждение способов нормирования уже выходит за рамки статьи.
В заключении полный текст программы.
Файл SignLib.py:
import math def custom_sort(countour): return -countour.shape[0] def get_center(countour): # вычислим центр тяжести контура sum_x = 0.0 sum_y = 0.0 for point in countour: x = float(point[0][0]) y = float(point[0][1]) sum_x += x sum_y += y xc = sum_x / float(len((countour))) yc = sum_y / float(len((countour))) return xc,yc def get_beg_point(countour,xc,yc): max = 0 beg_point = -1 for i in range(0, len(countour)): point = countour[i] x = float(point[0][0]) y = float(point[0][1]) dx = x - xc dy = y - yc r = math.sqrt(dx * dx + dy * dy) if r > max: max = r beg_point = i return beg_point def get_polar_coordinates(x0,y0,x,y,xc,yc): #Первая координата в полярных координатах - радиус dx=xc-x dy=yc-y r=math.sqrt(dx*dx+dy*dy) #Вторая координата в полярных координатах - узел, вычислим относительно начальной точки dx0=xc-x0 dy0=yc-y0 r0 = math.sqrt(dx0 * dx0 + dy0 * dy0) scal_mul=dx0*dx+dy0*dy cos_angle=scal_mul/r/r0 sgn=dx0*dy-dx*dy0 #опредедляем, в какую сторону повернут вектор if cos_angle>1: if cos_angle>1.0001: raise Exception("Что-то пошло не так") cos_angle=1 angle=math.acos(cos_angle) if sgn<0: angle=2*math.pi-angle return angle,r def polar_to_decart(angle,r): x=math.sin(angle)*r y=math.cos(angle)*r return x,y def polar_sort(item): return item[0] def get_polar_coordinates_list(countour,xc,yc,beg_point): polar_coordinates = [] x0 = countour[beg_point][0][0] y0 = countour[beg_point][0][1] for point in countour: x = int(point[0][0]) y = int(point[0][1]) angle, r = get_polar_coordinates(x0, y0, x, y, xc, yc) polar_coordinates.append((angle, r)) # Создадим вектор описание polar_coordinates.sort(key=polar_sort) return polar_coordinatesОсновной файл программы:
import math import matplotlib.pyplot as plt import cv2 import numpy as np from SignLib import custom_sort, get_center, get_beg_point, get_polar_coordinates_list, polar_to_decart img = cv2.imread("Samples/battery.jpg") gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) thresh = 100 #get threshold image ret,thresh_img = cv2.threshold(gray, thresh, 255, cv2.THRESH_BINARY) # find contours without approx contours,_ = cv2.findContours(thresh_img,cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE) contours=list(contours) contours.sort(key=custom_sort) sel_countour=contours[1] xc,yc=get_center(sel_countour) beg_point=get_beg_point(sel_countour,xc,yc) polar_coord=get_polar_coordinates_list(sel_countour,xc,yc,beg_point) count=100 full_angle=2*math.pi i=1 end_angle = float(i) * full_angle / float(count) summ=0.0 count_angles=0.0 signature=[] for item_coord in polar_coord: angle,r=item_coord if angle>end_angle: signature.append((angle,summ/count_angles)) i+=1 end_angle = float(i) * full_angle / float(count) summ=0 count_angles=0 summ+=r count_angles+=1 signature.append((angle,summ/count_angles)) print(signature) img_contours = np.zeros((img.shape[0],img.shape[1],3), np.uint8) # np.uint8(np.zeros((img.shape[0],img.shape[1]))) cv2.drawContours(img_contours, [sel_countour], -1, (255,0,0), 1) for i in range(1,len(signature)): angle1,r1=signature[i-1] angle2,r2=signature[i] x1, y1=polar_to_decart(angle1,r1) x2, y2 = polar_to_decart(angle2, r2) cv2.line(img_contours, (int(x1+xc), int(y1+yc)), (int(x2+xc), int(y2+yc)), (0,0,255), thickness=1) angle1,r1=signature[len(signature)-1] angle2,r2=signature[0] x1, y1=polar_to_decart(angle1,r1) x2, y2 = polar_to_decart(angle2, r2) cv2.line(img_contours, (int(x1+xc), int(y1+yc)), (int(x2+xc), int(y2+yc)), (0,0,255), thickness=1) cv2.imshow('origin', img) # выводим итоговое изображение в окно cv2.imshow('res', img_contours) # выводим итоговое изображение в окно x=[] y=[] for item in signature: angle,r=item x.append(angle) y.append(r) plt.plot(x,y) plt.show() cv2.waitKey() cv2.destroyAllWindows()
ссылка на оригинал статьи https://habr.com/ru/post/687864/
Добавить комментарий