Дело было вечером, делать было нечего (с)
К предыдущей статье про воздушный винт был комментарий от @RusikR2D2:
У вас получился винт, оптимизированный для "нулевой" скорости (висение). Ваш коптер теперь будет медленнее летать, медленнее набирать высоту, скорее всего, "тупее" реагировать на управление и хуже держать ветер. Также могут появиться вибрации (контроллер настроен именно на то соотношение тяги-оборотов, у вас же оно стало другим)
В данной статье постараюсь разобраться так ли это на самом деле, какие минусы и плюсы возникнут, как эти винты поведут себя в полёте.
Первая версия воздушных винтов была напечатана на 3D принтере, а это повлекло за собой то, что лопасти были крайне гибкими. Испытания с такими лопастями проводить на улице я, откровенно говоря, побоялся из-за потери коптера. И я принял решение, что для улицы я буду делать максимально жёсткие и держащие форму винты. Конечно, изготавливать я их буду из композитных материалов, а именно эпоксидной смолы, армированной углеродным волокном в виде ровинга.
Но, прежде чем что-то делать, необходимо обзавестись оснасткой. Оснастка, в данном случае — матрица (форма), состоящая из двух половинок. Матрица проектируется на основе изделия, которое необходимо получить.
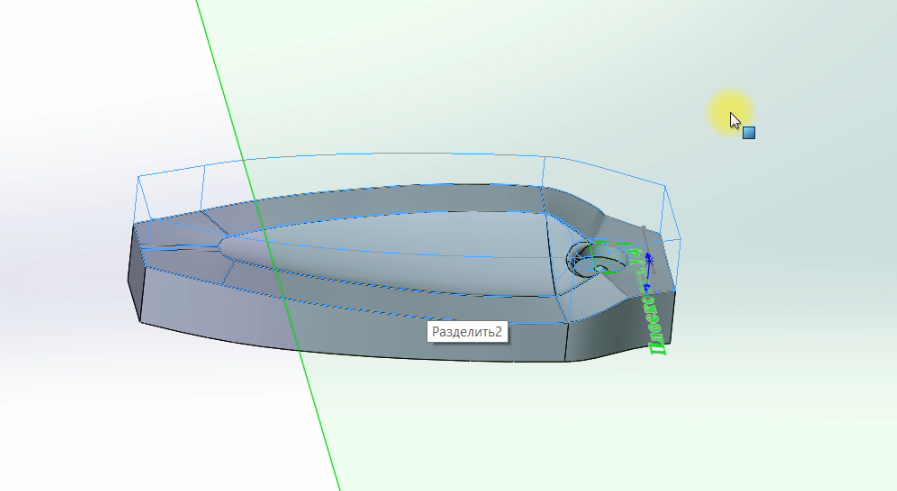
После проектирования, матрицу можно изготовить различными способами, какими — я недавно писал в своей другой статье. Но, сегодня, матрицу как и прототипы винтов, я буду печатать на фотополимерном 3Д принтере. Это просто, быстро, дёшево и доступно для воспроизведения в домашних условиях, а именно это и хочется показать, что используя не совсем специализированные материалы можно получить неплохой результат.

После печати форма нуждается в обработке. Обрабатываются матрицы наждачной бумагой зернистостью от 800 до 1500, на одну половинку затрачивается порядка 5 минут. На фото ниже можно ознакомиться с результатами обработки.

Т.к. эпоксидная смола — это довольно клейкое вещество, то предполагается, что формы необходимо защитить, если этого не сделать, то изделие просто-напросто приклеится к оснастке и результат будет около нулевой. Поэтому, необходимо на форму нанести разделительный слой. Есть специализированные разделительные системы, на основе воска, силиконов или полупостоянные смазки, но у нас другая задача — сделать из того, что есть максимально под рукой. А под рукой есть обувной крем. Необходимо его нанести на форму, подождать когда он высохнет, потом располировать и повторить этот процесс раза 2-3. Для новых форм это особенно важно. Второй момент — лишнее в процессе обработки — не снять лишнее.

На этом матрицы полностью готовы к формовке. Но нам необходим уголь (углеродный ровинг). Я зашёл на авито и списался с продавцом о возможности приобретения небольшого количества желаемой нити, продавец пошёл мне навстречу и продал 5 метров. Смола эпоксидная продаётся практически в любом строительном магазине (ЭД-20, например).
Можно приступать к формовке. Пропитываю угольное волокно эпоксидной смолой и укладываю в форму.

Через сутки смола твердеет и можно извлекать изделие. На фото ниже извлечённое изделие из формы с облоем, которые необходимо срезать.

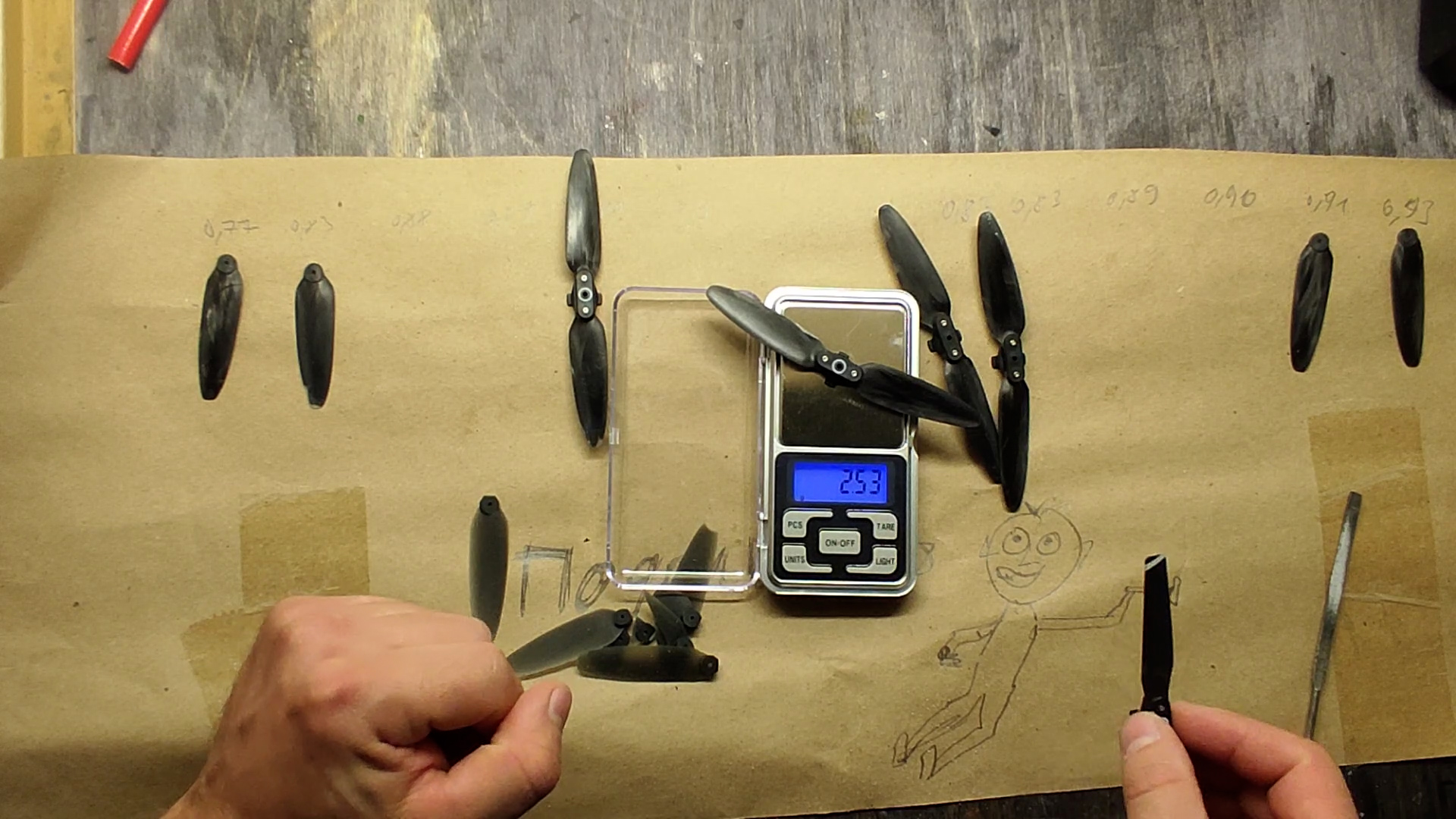
После обработки лопасти взвешиваю и собираю в готовые винты. Взвешиваю для того, чтобы собирать лопасти с наиболее близкой массой.
Готовый самодельный винт и его масса. (2,53 г)
Масса штатного винта. (2,61 г)
Для проверки провёл испытания в комнате, всё тоже самое, что и с напечатанными лопастями из предыдущей статьи. Прирост был чуть больше 8%, что на 1% больше, чем результат на напечатанных лопастях. Возможно, это связано с тем, что композитные лопасти намного жёстче и стабильнее, чем напечатанные, ну или ошибка где-то закралась )
И наступает момент, ради которого всё задумывалось — испытания на улице.
Сначала в полёт был отправлен коптер со штатными винтами и он улетел. Да-да, улетел и не вернулся, покоится где-то в лесу. Ниже приведён его последний кадр. Я не уследил, что коптер на высоте от 250 м стал быстро удаляться от точки старта (облачками залюбовался 🙂 ). Потом потеря сигнала и пока.

Пришлось купить такой же и повторить испытания. Со вторым прошло всё куда более гладко. Из-за потери коптера я решил уменьшить максимальную высоту подъёма с 300 м до 200 м. И программа испытаний получается следующая:
-
Взлёт и старт секундомера;
-
Подъём на высоту 200 м.;
-
Спуск на высоту 50 м.;
-
Полёт вдоль дороги по маршруту до момента, когда Spark захочет полететь домой;
-
Прилёт в точку дом, спуск до высоты 1 м., принудительное удержание коптера в полёте;
-
Посадка по причине невозможности больше держаться в воздухе.
-
Останов секундомера.
Сначала летаю на штатных воздушных винтах на первом и втором аккумуляторе, потом на самодельных.
Видеоверсия испытаний.
И, конечно же, результаты измерений.
Штатный воздушный винт
1 АКБ 15:10 (910 сек)
2 АКБ 15:00 (900 сек)
Самодельный воздушный винт
1 АКБ 16:35 (995 сек)
2 АКБ 16:20 (980 сек)
Получается, что для при использовании первой АКБ прирост составил 9,3%, для второй АКБ 8,8%, т.е. по сути, тот же прирост, что и при висении.
Но, внимательный читатель может заметить, что время полёта на месте в помещении и на улице сильно отличается. В помещении время не дотягивало и до 15 минут, а на улице более 16 минут, на улице же ветер, который мешает летать.
Секрет кроется в косой обдувке воздушного винта, за счёт которой увеличивается расход воздуха через винт, а следовательно увеличивается и тяга при той же мощности.
Этот эффект используют и большие вертолёты, когда необходимо взлететь или с перегрузом или в условиях разреженной атмосферы ( в горах), но для этого нужно взлетать по самолётному. Ниже пример такого взлёта.
Возвращаясь к начальному вопросу о том, что получился оптимизированный винт для нулевой скорости. Да, это отчасти так, но из-за того, что скорости на воздушном винте, вызванные его вращением в среде довольно высоки (угловая скорости винта 200 об/сек), а скорость аппарата в среде довольно мала 2-3 м/с, то и получается, что негативного влияния последнего на конечные результаты просто нет. Другое дело, если в экспериментах участвовал самолёт, то да, влияние было бы существенно и эффективность винта на скорости 0 м/с сильно отличалась от эффективности при крейсерском полёте.
О минусах угольных винтов — сильно ухудшилась связь приёмо-передатчика с коптером. Углеродное волокно электропроводно, видимо, из-за этого связь ухудшилась. Для исправления этой проблемы лопасти можно сделать из стеклоткани или базальтового волокна. Они условно радиопрозрачны.
На этом всё, спасибо за внимание. На вопросы готов ответить.
ссылка на оригинал статьи https://habr.com/ru/company/stc_spb/blog/693000/
Добавить комментарий