Приветствую Вас, Хабровчане!
Я думаю, по названию статьи и так понятно о чем я Вам буду рассказывать в этой работе. Поэтому не вижу смысла в длинных преамбулах и аннотациях. Ну а для тех, кто совсем не в теме и фамилию известного нидерландского ученого видят впервые — отправляю Вас на википедию с его биографией и алгоритмом, о котором далее пойдет речь.
И да, я прекрасно понимаю, что я далеко не первый и не последний кто находит в себе силы попробовать на практике реализовать этот алгоритм. Как говорится, повторение — мать учения. Поэтому не нужно меня за это закидывать камнями, палками и чем бы то ни было. Я лишь предложу свой вариант реализации и продемонстрирую результаты. Как Вы уже догадались, писать будем на языке C#. Исходники найдете здесь.
Поехали!
Содержание
Математическая постановка задачи
В декартовой прямоугольной системе координат на плоскости  задана равномерная сетка:
задана равномерная сетка:

где  — узлы сетки;
— узлы сетки;  — шаги сетки;
— шаги сетки; — количество точек по оси
— количество точек по оси и
и , соответственно. В каждом узле сетки задано значение
, соответственно. В каждом узле сетки задано значение  , представляющее собой высоту карты (ландшафта) местности в рассматриваемой точке. Значения
, представляющее собой высоту карты (ландшафта) местности в рассматриваемой точке. Значения  , образующие исследуемую поверхность, могут быть отрицательными — в таком случае высоту карты следует понимать как глубину относительно некоторой нулевой отметки
, образующие исследуемую поверхность, могут быть отрицательными — в таком случае высоту карты следует понимать как глубину относительно некоторой нулевой отметки  .
.
Заданы стартовая и целевая точка искомого оптимального маршрута и
и , рисунок 1.
, рисунок 1.

На выходе мы должны получить конечный список (массив) координат , следуя по которым мы доберемся из точки
, следуя по которым мы доберемся из точки в точку
в точку наиболее оптимальным образом.
наиболее оптимальным образом.
Также в алгоритме будет учитываться параметр, задающий максимальный угол уклона (в градусах) для поиска подходящих соседей.
Так, ну а при чем тут графы и какой-то алгоритм ?!
Графы и алгоритм Дейкстры
Алгоритм Дейкстры представляет собой глобальный алгоритм поиска кратчайших путей на взвешенном графе. О том, что такое граф, и с чем его едят, что такое вершина, ребро, какие графы бывают — я здесь Вам рассказывать не буду. На тему графов написано немало хороших книг, на одну из которых я дам ссылку в конце статьи. А пока я буду предполагать, что Вы уже знакомы с основными понятиями теории графов. Хотя, как по мне, большинство терминов, которые будут описаны далее в статье должны быть понятны и ежу на интуитивном уровне.
Как я упомянул выше, алгоритм Дейкстры является глобальным, я бы даже сказал самым глобальным из всех подобных. Имеются и другие алгоритмы, которые в ряде случаев оптимизируют и ускоряют поиск, например, такие как алгоритм Ли, алгоритм A* и др. Очень хороший обзор на алгоритмы поиска (в т.ч. и Дейкстры) да еще и с примерами кода можете найти тут.
Ну а я просто захотел попробовать сделать это своими силами. Как говорится, хочешь сделать что-то хорошо — сделай это сам! =)
Так в чем же именно глобальность алгоритма Дейкстры?! Глобальность в том, что даже если нам будет необходимо найти кратчайший путь между двумя смежными вершинами графа, в котором 1000 вершин, нам так или иначе придется перебрать абсолютно все 1000 вершин.
Поясню это на примере взвешенного графа с 6-ю вершинами, рисунок 2.

Найдем кратчайший путь из вершины до вершины
до вершины . Даже не «запуская» на этом графе алгоритм Дейкстры, очевидно, что кратчайший путь из
. Даже не «запуская» на этом графе алгоритм Дейкстры, очевидно, что кратчайший путь из в
в будет путь
будет путь  , длина которого равна
, длина которого равна  . Так вот, несмотря на то, что вершиныисмежные — нам все равно пришлось рассматривать ВСЕ вершины этого графа. В этом и заключается глобальность, и в то же время сложность этого алгоритма (я специально подобрал весовые коэффициенты для некоторых ребер намного большими чем другие).
. Так вот, несмотря на то, что вершиныисмежные — нам все равно пришлось рассматривать ВСЕ вершины этого графа. В этом и заключается глобальность, и в то же время сложность этого алгоритма (я специально подобрал весовые коэффициенты для некоторых ребер намного большими чем другие).
Превращаем поверхность в граф
Чтобы решить нашу задачу с помощью алгоритма Дейкстры нам нужно каким-то образом «превратить» нашу исследуемую поверхность во взвешенный граф. Делать будем это так, — посмотрим на нашу поверхность сверху (перпендикулярно плоскости  ), вид будет примерно такой, рисунок 3:
), вид будет примерно такой, рисунок 3:

Точки поверхности будут спроецированы на плоскость— это и будут вершины нашего графа. Но откуда появились эти «крестики» в каждом квадратике, спросите Вы ?! Эти крестики — тоже ребра графа, которые добавлены для того, чтобы у нас была возможность ходить не только по горизонтали и вертикали, но и по диагонали. Да, это сильно увеличит сложность алгоритма и время расчета, но зато путь будет еще более оптимальным.
Таким образом любую вершину подобного графа можно идентифицировать с помощью координаты  , что нам очень пригодится в дальнейшем для хранения всех вершин графа в виде матрицы.
, что нам очень пригодится в дальнейшем для хранения всех вершин графа в виде матрицы.
Наш граф должен быть взвешенным. Вот тут, конечно, можно поиграться и задавать весовые коэффициенты любым изощренным способом. Но я пока поступлю просто — вес ребра, соединяющего смежные вершины
ребра, соединяющего смежные вершины  и
и  , заданные своими координатамибудет не что иное как расстояние в пространстве между соответствующими точками поверхности, из которой наш граф был построен:
, заданные своими координатамибудет не что иное как расстояние в пространстве между соответствующими точками поверхности, из которой наш граф был построен:

Рассматриваемый граф является связным (причем степень связности достаточно неплохая!, особенно после добавления диагональных ребер), поэтому «тупиковых» ситуаций возникнуть не должно и если все учтено правильно, алгоритм все-таки после долгих блужданий доберется из стартовой в целевую вершину и на своем пути «переберет» абсолютно все вершины графа.
Ну все…осталось запустить алгоритм Дейкстры!
Само собой при численной реализации этого алгоритма возникнут определенные сложности много костылей и вопросы. Их я уже буду комментировать в процессе объяснения написанного кода.
Численная реализация
Кодить, как я уже говорил будем на C#, поэтому постараемся взять все самое лучшее из возможностей этого языка. А возможностей у него немало.
Я создам в Visual Studio консольный проект (.NET 4.7.2). Ключевыми классами будут Point2D.cs, Vertex.cs и Graph.cs. Начнем с самого простого.
Класс Point2D будет содержать всего два свойства для хранения координат вершины графа:
public class Point2D { public int i { get; } public int j { get; } public Point2D(int i, int j) { this.i = i; this.j = j; } }С классом Vertex уже чуть поинтереснее:
public class Vertex { public Point2D Coordinate { get; set; } public double Height { get; set; } public Point2D CameFrom { get; set; } public double Label { get; set; } public bool IsVisited { get; set; } public bool IsGoal { get; set; } public bool IsObstacle { get; set; } public Vertex(int i, int j, Point2D CameFrom = null, double Height = 0.0, double Label = double.MaxValue, bool IsVisited = false, bool IsGoal = false, bool IsObstacle = false) { Coordinate = new Point2D(i, j); this.CameFrom = CameFrom; this.Height = Height; this.Label = Label; this.IsVisited = IsVisited; this.IsGoal = IsGoal; this.IsObstacle = IsObstacle; } }Опишу кратко свойства.
Первое из них — это координаты вершины графа; Height — высота, значение функции  в точке вершины, необходимое для расчета весового коэффициента и величины уклона между двумя смежными вершинами; CameFrom — здесь в процессе работы алгоритма будут храниться координаты вершины из которой мы попали в текущую вершину — на основании этого свойства мы в конце работы алгоритма сформируем наш искомый маршрут; Label — метка, хранящая значение длины пути из стартовой вершины в текущую; IsVisited — говорит нам посетили ли мы данную вершину в процессе расчета или нет; IsGoal — данное свойство будет истинным только для целевой вершины графа (та вершина, оптимальный путь к которой мы ищем). Это свойство понадобилось мне для того, чтобы алгоритм Дейкстры не завершился раньше времени и мы обошли абсолютно все вершины графа; IsObstacle — наш алгоритм будет также уметь обходить препятствия, например, искать кратчайший путь в лабиринте, это свойство позволяет задать определенные вершины как вершины-препятствия, чтобы выбрасывать их из рассмотрения наряду с уже посещенными.
в точке вершины, необходимое для расчета весового коэффициента и величины уклона между двумя смежными вершинами; CameFrom — здесь в процессе работы алгоритма будут храниться координаты вершины из которой мы попали в текущую вершину — на основании этого свойства мы в конце работы алгоритма сформируем наш искомый маршрут; Label — метка, хранящая значение длины пути из стартовой вершины в текущую; IsVisited — говорит нам посетили ли мы данную вершину в процессе расчета или нет; IsGoal — данное свойство будет истинным только для целевой вершины графа (та вершина, оптимальный путь к которой мы ищем). Это свойство понадобилось мне для того, чтобы алгоритм Дейкстры не завершился раньше времени и мы обошли абсолютно все вершины графа; IsObstacle — наш алгоритм будет также уметь обходить препятствия, например, искать кратчайший путь в лабиринте, это свойство позволяет задать определенные вершины как вершины-препятствия, чтобы выбрасывать их из рассмотрения наряду с уже посещенными.
Теперь о классе Graph.
Свойства класса Graph:
public class Graph { /// <summary> /// Шаг сетки по оси Ox /// </summary> public double dx { get; } /// <summary> /// Шаг сетки по оси Oy /// </summary> public double dy { get; } /// <summary> /// Количество вершин по оси Ox /// </summary> public int N { get; } /// <summary> /// Количество вершин по оси Oy /// </summary> public int M { get; } /// <summary> /// Матрица вершин графа /// </summary> public Vertex[,] Vertices { get; } /// <summary> /// Предельная величина уклона, необходимая для обхода препятствий, в градусах /// </summary> public double MaxSlope { get; } }Для работы алгоритма реализуем несколько вспомогательных методов.
Для расчета весов и уклона нам нужно будет получать «реальные» координаты вершины графа на плоскости  (с учетом величины шагов
(с учетом величины шагов  и
и  ):
):
(double, double) GetRealXY(Vertex vertex) { double x = vertex.Coordinate.i * dx; double y = vertex.Coordinate.j * dy; return (x, y); } Вес ребра между смежными вершинами (расстояние между точками поверхности) находим так:
double Weight(Vertex v1, Vertex v2) { (double, double) x1y1 = GetRealXY(v1); (double, double) x2y2 = GetRealXY(v2); double xDiff = x1y1.Item1 - x2y2.Item1; double yDiff = x1y1.Item2 - x2y2.Item2; double zDiff = v1.Height - v2.Height; double sumOfSquares = Math.Pow(xDiff, 2.0) + Math.Pow(yDiff, 2.0) + Math.Pow(zDiff, 2.0); return Math.Sqrt(sumOfSquares); }Следующий метод возвращает величину уклона между смежными вершинами (в градусах):
private double Slope(Vertex v1, Vertex v2) { double hypotenuse = Weight(v1, v2); // Вес ребра - это и есть по факту расстояние между точками double zDiffAbs = Math.Abs(v1.Height - v2.Height); // Модуль разности по высоте return Math.Asin(zDiffAbs / hypotenuse) * 180.0 / Math.PI; // Переводим радианы в градусы } Для удобства реализуем 8 методов для получения соседней вершины в зависимости от направления (я привел один из них):
private Vertex GetTopVertex(Vertex v) => Vertices[v.Coordinate.i, v.Coordinate.j + 1];И еще 8 методов для определения принадлежности вершины той или иной части сетки (здесь я привел два из них):
private bool IsTopRightVertex(Vertex v1) => v1.Coordinate.i == N - 1 && v1.Coordinate.j == M - 1; private bool IsVertexOnTheRightSide(Vertex v1) => v1.Coordinate.i == N - 1;Эти методы понадобятся для получения всех смежных вершин для рассматриваемой вершины. Вот тут нам придется нарубить if-ов, т.к. количество смежных вершин не всегда одно и то же:
Метод GetAllAdjacentVertices(Vertex vertex) для получения всех смежных вершин
private List<Vertex> GetAllAdjacentVertices(Vertex vertex) { #region Рассматриваем угловые вершины if (IsTopRightVertex(vertex)) return new List<Vertex> { GetLeftVertex(vertex), GetBottomLeftVertex(vertex), GetBottomVertex(vertex) }; if (IsBottomRightVertex(vertex)) return new List<Vertex> { GetTopVertex(vertex), GetTopLeftVertex(vertex), GetLeftVertex(vertex) }; if (IsBottomLeftVertex(vertex)) return new List<Vertex> { GetTopVertex(vertex), GetTopRightVertex(vertex), GetRightVertex(vertex) }; if (IsTopLeftVertex(vertex)) return new List<Vertex> { GetBottomVertex(vertex), GetBottomRightVertex(vertex), GetRightVertex(vertex) }; #endregion #region Рассматриваем боковые вершины if (IsVertexOnTheTopSide(vertex)) return new List<Vertex> { GetLeftVertex(vertex), GetBottomLeftVertex(vertex), GetBottomVertex(vertex), GetBottomRightVertex(vertex), GetRightVertex(vertex) }; if (IsVertexOnTheRightSide(vertex)) return new List<Vertex> { GetTopVertex(vertex), GetTopLeftVertex(vertex), GetLeftVertex(vertex), GetBottomLeftVertex(vertex), GetBottomVertex(vertex) }; if (IsVertexOnTheBottomSide(vertex)) return new List<Vertex> { GetLeftVertex(vertex), GetTopLeftVertex(vertex), GetTopVertex(vertex), GetTopRightVertex(vertex), GetRightVertex(vertex) }; if (IsVertexOnTheLeftSide(vertex)) return new List<Vertex> { GetTopVertex(vertex), GetTopRightVertex(vertex), GetRightVertex(vertex), GetBottomRightVertex(vertex), GetBottomVertex(vertex) }; #endregion // Иначе вершина лежит "в середине карты" и нужно вернуть все 8 смежных вершин return new List<Vertex> { GetTopVertex(vertex), GetRightVertex(vertex), GetBottomVertex(vertex), GetLeftVertex(vertex), GetTopRightVertex(vertex), GetBottomRightVertex(vertex), GetBottomLeftVertex(vertex), GetTopLeftVertex(vertex) }; }Напишем метод, который будет «отсеивать неподходящих» соседей:
private List<Vertex> GetValidNeighbors(Vertex current) { // Из всех смежных вершин оставляем только те, которые // 1. Еще не посещены // 2. Не являются вершинами-препятствиями // 3. Наклон к которым меньше заданной величины (например, 30 градусов) return GetAllAdjacentVertices(current).Where(v => !v.IsVisited && !v.IsObstacle && Slope(v, current) < MaxSlope).ToList(); }и метод, который из оставшихся соседей будет отсеивать целевую вершину и сообщать осталось ли что-то после отсеивания:
private bool HasValidAndNotGoalNeighbors(Vertex vertex, out List<Vertex> validAndNotGoalNeighbors) { validAndNotGoalNeighbors = GetValidNeighbors(vertex).Where(v => !v.IsGoal).ToList(); return validAndNotGoalNeighbors.Any(); }Именно этот метод (в основном) и нужен для того, чтобы мы перебрали абсолютно все вершины графа (помните о глобальности, да??!). Так как бывают кейсы, когда мы натыкаемся на целевую вершину «раньше срока» (раньше того, как алгоритм пробежит по всем вершинам графа и найдет нам оптимальный маршрут).
Также в основном while-цикле метода по поиску пути (скоро мы уже дойдем до него =)) я буду накапливать в список посещенные вершины. Это тоже относится к замечанию выше и будет гарантировать нам «полный обход» всех вершин графа. Этот список посещенных вершин я буду использовать в следующем методе.
Метод для получения новой «текущей» вершины:
GetCurrent(List<Vertex> visitedVertices)
private Vertex GetCurrent(List<Vertex> visitedVertices) { List<Vertex> validAndNotGoalNeighbors = new List<Vertex>(); foreach (Vertex v in visitedVertices) if (HasValidAndNotGoalNeighbors(v, out validAndNotGoalNeighbors)) break; // Если не нашлось ни одного подходящего соседа, значит мы дошли // до целевой вершины. Алгоритм завершен if (!validAndNotGoalNeighbors.Any()) return null; // Иначе находим и возвращаем соседа с минимальной меткой double minLabel = validAndNotGoalNeighbors.Min(v => v.Label); Vertex newCurrent = validAndNotGoalNeighbors.First(v => v.Label == minLabel); return newCurrent; }И вот он!! Метод для поиска кратчайшего (оптимального) пути (и его длины):
public List<Point2D> FindShortestPathAndLength(Point2D startPoint, Point2D goalPoint, out double shortestPathLength) { shortestPathLength = 0.0; // Стартовой вершине присваиваем нулевую метку Vertex start = Vertices[startPoint.i, startPoint.j]; start.Label = 0.0; // Целевую вершину пометим, что она целевая Vertex goal = Vertices[goalPoint.i, goalPoint.j]; goal.IsGoal = true; // Помечаем стартовую вершину как текущую Vertex current = start; // В этом списке будем копить посещенные вершины List<Vertex> visitedVertices = new List<Vertex>(); while (current != null) { // Находим подходящих (годных) соседей: которые еще не посещены, не являются препятствиями и т.п. List<Vertex> neighbors = GetValidNeighbors(current); foreach (Vertex neighbor in neighbors) { double currentWeight = current.Label + Weight(current, neighbor); if (currentWeight < neighbor.Label) { neighbor.Label = currentWeight; neighbor.CameFrom = current.Coordinate; } } // После того как все подходящие соседи рассмотрены (им расставлены метки), помечаем текущую вершину как посещенную current.IsVisited = true; // и добавляем ее в список посещенных вершин visitedVertices.Add(current); // Используем этот список посещенных вершин для поиска новой текущей вершины current = GetCurrent(visitedVertices); } // В конце работы алгоритма в целевой вершине в свойстве Label будет находиться длина искомого пути shortestPathLength = goal.Label; // Основываясь на свойстве CameFrom сформируем и вернем сам искомый путь return GetShortestPath(goal); }Следующий метод на основе свойства CameFrom класса Vertex «собирает» и возвращает нам искомый путь:
GetShortestPath(Vertex goal)
private List<Point2D> GetShortestPath(Vertex goal) { List<Point2D> path = new List<Point2D>(); path.Add(goal.Coordinate); Point2D cameFrom = goal.CameFrom; while (cameFrom != null) { Vertex vertex = Vertices[cameFrom.i, cameFrom.j]; path.Add(vertex.Coordinate); cameFrom = vertex.CameFrom; } return path; }Надо заметить, что массив, содержащий координаты искомого маршрута будет сформирован «задом на перед». Т.е. первым элементом массива будут координаты целевой вершины, а последним элементом — координаты стартовой.
Ну вот, в принципе, и все!
Весь остальной код, классы и методы, — являются вспомогательными (вычисление двумерного Гауссиана, запись/чтение из файла и т.п.). Если Вы дошли до этого абзаца и хорошо понимаете, что происходит, остальную часть, я думаю, понять Вам не составит труда. Поэтому не буду на нем останавливаться, тем более что код подробно прокомментирован.
Стоит, наверное, все-таки упомянуть о двух перегруженных конструкторах класса Graph, один из которых инициализирует граф с помощью поверхности (для расчетов я использовал только Гауссиан, можете поиграться с другими поверхностями), а другой конструктор инициализирует граф с помощью матрицы из нулей и единичек (матрица-препятствий) для создания сложных лабиринтов.
Давайте наконец посмотрим на результаты!
Результаты расчетов. Простые препятствия
Начнем с простого примера. Создадим на сетке небольшое вертикальное препятствие, рисунок 4, и позволим алгоритму обойти его:

Вершины графа, которые попадают под черную линию имеют свойство IsObstacle = true, чтобы пометить их как вершины-препятствия. Параметр уклона MaxSlope здесь не имеет смысла, т.к. алгоритм работает в одной плоскости. Как видите, результат очень правдоподобный.
Из архива. Как я формировал это препятствие в csv-файле. Координаты пути
Для чтения матрицы из csv-файла и других вспомогательных действий создан класс Obstacle.
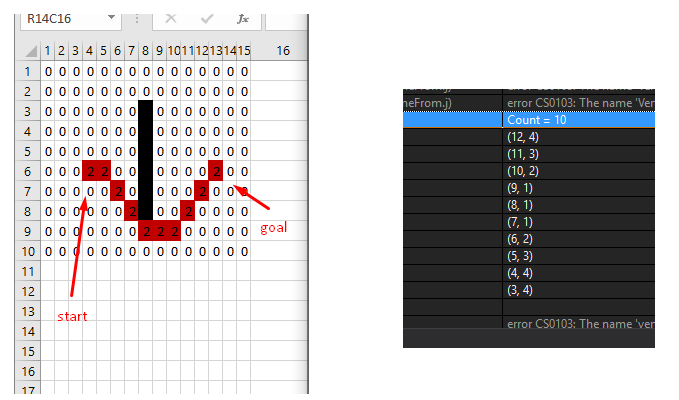
Рассмотрим следующий пример, рисунок 5:

В данном случае я бы не сказал, что это является ошибкой, ведь алгоритм учитывает как препятствие только те вершины графа, которые непосредственно помечены как вершины-препятствия (IsObstacle = true).
А вот если мы сформируем препятствие вот так, тогда алгоритм никуда не денется и ему придется его обойти, рисунок 6:

Лабиринты
Усложним работу для алгоритма и сформируем для него целый лабиринт препятствий, рисунок 7:

Увеличим лабиринт и изменим целевую вершину, рисунок 8:

Все исходные файлы по которым были построены все вышеперечисленные препятствия и лабиринты, а также координаты найденных путей находятся в проекте в соответствующих папках.
Поиск оптимального пути на поверхности
Ну и в конце приведу пример поиска оптимального пути между двумя точками на сложной поверхности. Именно оптимального, т.к. нельзя сказать, что он кратчайший, рисунок 9:

Для имитации холмов и оврага были использованы двумерные функции Гаусса с различными параметрами. Для имитации искусственных сооружений в класс Graph был добавлен метод:
CreateBuilding()
public void CreateBuilding(Point2D bottomLeftCoordinate, int width, int length, double height) { for (int i = bottomLeftCoordinate.i; i < bottomLeftCoordinate.i + width; i++) { for (int j = bottomLeftCoordinate.j; j < bottomLeftCoordinate.j + length; j++) Vertices[i, j].Height = height; } }Замечу, что здесь ни одна вершина графа не помечена как препятствие, алгоритм находит оптимальный путь благодаря заданию параметра MaxSlope. Увеличивая этот параметр алгоритм может пойти прямиком через горы.
И еще картинки с других ракурсов.


Заключение
Спасибо за прочтение!
Надеюсь статья была интересной и полезной. Все доработки и оптимизацию алгоритма оставляю Вам.
Литература:
Робин Уилсон. Введение в теорию графов. Пятое издание. 2019
Всем добра и качественного кода!
ссылка на оригинал статьи https://habr.com/ru/post/699466/
Добавить комментарий