Регулятор нагрузки при помощи arduino nano.
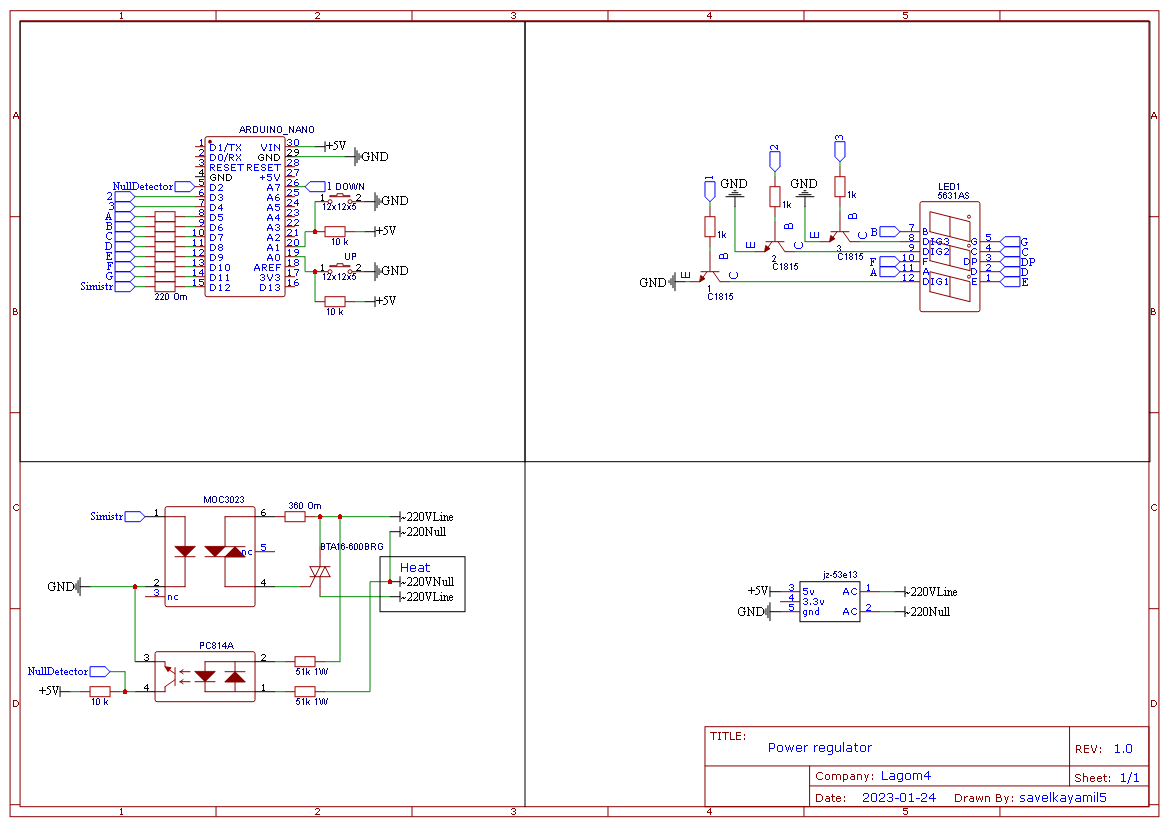
Данный регулятор управляется при помощи arduino и симисторного выхода. Необходимую мощность мощно выставить при помощи двух кнопок, а подаваемая мощность отображается на трехразрядном семисегментном индикаторе в процентах (0 — мощность не подается, 100 — максимальная мощность). Данный регулятор можно использовать для плавного управления нагревом нагревателей (для самогонных аппаратов самое то).
Код программы для arduino:
#include "7segments.h" #include "MyLib.h" #include "Buttons.h" #include <GyverTimers.h> #include <GyverDimmer.h> Segmentor segment(5, 6, 7, 8, 9, 10, 11); unsigned long currentDisplay = 0; MyRelayOut firstTrans(A7); MyRelayOut secondTrans(3); MyRelayOut thirdTrans(4); Button buttonUp(A0); Button buttonDown(A1); const int nullDetector = 2; // детектор нуля const int simistr = 12; Dimmer<simistr> dim; int valuePercent = 0; void setup() { attachInterrupt(0, isr, RISING); Timer2.enableISR(); } void loop() { if(buttonUp.click()){valuePercent++;} if(buttonDown.click()){valuePercent--;} if(valuePercent < 0){valuePercent = 0;} else if(valuePercent > 100){valuePercent = 100;} Display(valuePercent); dim.write(map(valuePercent, 0, 100, 0, 255)); } void isr() { // вызывать в прерывании детектора нуля // если tickZero() - true - нужно перезапустить таймер с периодом getPeriod() if (dim.tickZero()) Timer2.setPeriod(dim.getPeriod()); else Timer2.restart(); // иначе перезапустить со старым } // прерывание таймера ISR(TIMER2_A) { dim.tickTimer(); // вызвать tickTimer() Timer2.stop(); // останавливаем таймер } void Display(int value){ if(millis() - currentDisplay >= 10){ currentDisplay = millis(); int firstNumber = value%10; int secondNumber = value%100/10; int thirdNumber = value/100; firstTrans.on(); segment.chooseNumber(firstNumber); firstTrans.off(); secondTrans.on(); segment.chooseNumber(secondNumber); secondTrans.off(); thirdTrans.on(); segment.chooseNumber(thirdNumber); thirdTrans.off(); } }Симистр выступает в роли диммера. Все библиотеки были написаны мной лично за исключением двух библиотек от Alex Gyver. Библиотеки, написанные мной, можно скопировать в основную программу. Написал я их для использования в дальнейших проектах.
Код мной написанных библиотек:
MyLib.h
#pragma once #include <Arduino.h> class MyRelayOut{ public: MyRelayOut(int pin){ pinMode(pin, OUTPUT); digitalWrite(pin, false); _pin = pin; } void on(){ if(_state){ return; } _state = true; digitalWrite(_pin, _state); } void off(){ if(!_state){ return; } _state = false; digitalWrite(_pin, _state); } private: int _pin; bool _state; }; class MyRelayIn{ public: MyRelayIn(int pin){ pinMode(pin, INPUT); _pin = pin; } bool read(){ if(digitalRead(_pin) == LOW){ return false; } if(digitalRead(_pin) == HIGH){ return true; } } private: int _pin; }; class MyOpticSensor{ public: MyOpticSensor(int pin){ pinMode(pin, INPUT); _pin = pin; } bool read(){ if(digitalRead(_pin) == LOW){ //если перед датчиком нет препятствий return true; } if(digitalRead(_pin) == HIGH){ // если препятсивя есть return false; } } private: int _pin; }; Buttons.h
#pragma once #include <Arduino.h> class Button { private: byte _pin; uint32_t _tmr; bool _flag; public: Button (byte pin) { _pin = pin; pinMode(_pin, INPUT_PULLUP); } bool click() { bool btnState = digitalRead(_pin); if (!btnState && !_flag && millis() - _tmr >= 100) { _flag = true; _tmr = millis(); return true; } if (!btnState && _flag && millis() - _tmr >= 500) { _tmr = millis (); return true; } if (btnState && _flag) { _flag = false; _tmr = millis(); } return false; } }; 7segments
#pragma once #include <Arduino.h> class Segmentor{ private: int _pinA; int _pinB; int _pinC; int _pinD; int _pinE; int _pinF; int _pinG; public: Segmentor(int pinA, int pinB, int pinC, int pinD, int pinE, int pinF, int pinG){ pinMode(pinA, OUTPUT); pinMode(pinB, OUTPUT); pinMode(pinC, OUTPUT); pinMode(pinD, OUTPUT); pinMode(pinE, OUTPUT); pinMode(pinF, OUTPUT); pinMode(pinG, OUTPUT); digitalWrite(pinA, LOW); digitalWrite(pinB, LOW); digitalWrite(pinC, LOW); digitalWrite(pinD, LOW); digitalWrite(pinE, LOW); digitalWrite(pinF, LOW); digitalWrite(pinG, LOW); _pinA = pinA; _pinB = pinB; _pinC = pinC; _pinD = pinD; _pinE = pinE; _pinF = pinF; _pinG = pinG; } void one(){ digitalWrite(_pinA, LOW); digitalWrite(_pinB, HIGH); digitalWrite(_pinC, HIGH); digitalWrite(_pinD, LOW); digitalWrite(_pinE, LOW); digitalWrite(_pinF, LOW); digitalWrite(_pinG, LOW); } void two(){ digitalWrite(_pinA, HIGH); digitalWrite(_pinB, HIGH); digitalWrite(_pinC, LOW); digitalWrite(_pinD, HIGH); digitalWrite(_pinE, HIGH); digitalWrite(_pinF, LOW); digitalWrite(_pinG, HIGH); } void three(){ digitalWrite(_pinA, HIGH); digitalWrite(_pinB, HIGH); digitalWrite(_pinC, HIGH); digitalWrite(_pinD, HIGH); digitalWrite(_pinE, LOW); digitalWrite(_pinF, LOW); digitalWrite(_pinG, HIGH); } void four(){ digitalWrite(_pinA, LOW); digitalWrite(_pinB, HIGH); digitalWrite(_pinC, HIGH); digitalWrite(_pinD, LOW); digitalWrite(_pinE, LOW); digitalWrite(_pinF, HIGH); digitalWrite(_pinG, HIGH); } void five(){ digitalWrite(_pinA, HIGH); digitalWrite(_pinB, LOW); digitalWrite(_pinC, HIGH); digitalWrite(_pinD, HIGH); digitalWrite(_pinE, LOW); digitalWrite(_pinF, HIGH); digitalWrite(_pinG, HIGH); } void six(){ digitalWrite(_pinA, HIGH); digitalWrite(_pinB, LOW); digitalWrite(_pinC, HIGH); digitalWrite(_pinD, HIGH); digitalWrite(_pinE, HIGH); digitalWrite(_pinF, HIGH); digitalWrite(_pinG, HIGH); } void seven(){ digitalWrite(_pinA, HIGH); digitalWrite(_pinB, HIGH); digitalWrite(_pinC, HIGH); digitalWrite(_pinD, LOW); digitalWrite(_pinE, LOW); digitalWrite(_pinF, LOW); digitalWrite(_pinG, LOW); } void eight(){ digitalWrite(_pinA, HIGH); digitalWrite(_pinB, HIGH); digitalWrite(_pinC, HIGH); digitalWrite(_pinD, HIGH); digitalWrite(_pinE, HIGH); digitalWrite(_pinF, HIGH); digitalWrite(_pinG, HIGH); } void nine(){ digitalWrite(_pinA, HIGH); digitalWrite(_pinB, HIGH); digitalWrite(_pinC, HIGH); digitalWrite(_pinD, HIGH); digitalWrite(_pinE, LOW); digitalWrite(_pinF, HIGH); digitalWrite(_pinG, HIGH); } void zero(){ digitalWrite(_pinA, HIGH); digitalWrite(_pinB, HIGH); digitalWrite(_pinC, HIGH); digitalWrite(_pinD, HIGH); digitalWrite(_pinE, HIGH); digitalWrite(_pinF, HIGH); digitalWrite(_pinG, LOW); } void chooseNumber(int k){ switch(k){ case 0: zero(); break; case 1: one(); break; case 2: two(); break; case 3: three(); break; case 4: four(); break; case 5: five(); break; case 6: six(); break; case 7: seven(); break; case 8: eight(); break; case 9: nine(); break; } } };
ссылка на оригинал статьи https://habr.com/ru/post/722184/
Добавить комментарий