
Недавно я занимался изучением IoT и, так как мне не хватало устройств, при попытках симулировать работу прошивки я часто сталкивался с неимением нужного /dev/xxx. Так что я стал задумываться, а могу ли написать драйвер самостоятельно, чтобы заставить прошивку работать. Независимо от того, насколько сложно это будет, и удастся ли воплотить такое намерение, в любом случае вы не пожалеете, если научитесь разрабатывать драйвер Linux с нуля.
❯ Введение
Я написал серию статей, ориентированных в основном на практику, о теории там мало что говорится. Разрабатывать драйверы я научился по книге Linux Device Drivers, а код к примерам, разобранным в этой книге, выложен на GitHub.
Если начать с азов – операционная система Linux делится на пространство ядра и пользовательское пространство. Доступ к аппаратному устройству возможен только через пространство ядра, а драйвер устройства при этом может трактоваться как API, предоставляемый в пространстве ядра и позволяющий коду из пользовательского пространства обращаться к устройству.
Опираясь на эти базовые концепции, я сформулировал для себя несколько проблем, которые и побудили меня изучить разработку драйвера.
- В программировании учёба всегда начинается с программы Hello World, так как же в данном случае написать программу Hello World?
- Как драйвер генерирует файлы устройств под /dev?
- Как именно происходит доступ драйвера к имеющемуся аппаратному обеспечению?
- Как написать код, управляемый системой? Или можно извлечь драйвер без кода? Где находятся двоичные файлы, в которых хранятся драйвера? В будущем все это можно было бы опробовать, чтобы изучить, насколько безопасно конкретное устройство.
❯ Всё начинается с Hello World
Вот какой получилась моя программа Hello World:
#include <linux/init.h> #include <linux/module.h> MODULE_LICENSE("Dual BSD/GPL"); MODULE_AUTHOR("Hcamal"); int hello_init(void) { printk(KERN_INFO "Hello World\n"); return 0; } void hello_exit(void) { printk(KERN_INFO "Goodbye World\n"); } module_init(hello_init); module_exit(hello_exit);Драйвер Linux разрабатывается на языке C, причём, на таком, который не слишком мне привычен. При работе я часто пользуюсь библиотекой Libc, которая отсутствует в ядре. Поскольку драйвер – это программа, работающая в ядре, именно в ядре мы используем и библиотечные функции.
Например, printk — это функция вывода, определяемая в ядре, она аналогична printf из Libc. Но мне она в большей степени напоминает логирующую функцию из Python, так как вывод printk идёт разу в лог ядра, а этот лог можно просмотреть командой dmesg.
В коде драйвера есть ровно одна точка входа и одна точка выхода. При загрузке драйвера в ядро выполнится функция, определяемая функцией module_init, которая в вышеприведённом коде называется hello_init. При выгрузке драйвера из ядра вызывается функция, определяемая в функции module_exit, которая в вышеприведённом коде называется hello_exit.
Из показанного выше кода понятно, что, загружаясь, драйвер выводит Hello World, а выгружаясь — Goodbye World.
Кстати: MODULE_LICENSE и MODULE_AUTHOR не так важны. Здесь я не буду подробно их разбирать.
И ещё: для вывода функции printk должен добавляться переход на новую строку, иначе опорожнение буфера происходить не будет.
❯ Компилируем драйвер
Драйвер необходимо скомпилировать командой make, и соответствующий Makefile показан ниже:
ifneq ($(KERNELRELEASE),) obj-m := hello.o else KERN_DIR ?= /usr/src/linux-headers-$(shell uname -r)/ PWD := $(shell pwd) default: $(MAKE) -C $(KERN_DIR) M=$(PWD) modules endif clean: rm -rf *.o *~ core .depend .*.cmd *.ko *.mod.c .tmp_versionsВообще исходный код ядра находится в каталоге /usr/src/linux-headers-$(shell uname -r)/, например:
$ uname -r 4.4.0-135-generic/usr/src/linux-headers-4.4.0-135/ --> каталог исходного кода ядра /usr/src/linux-headers-4.4.0-135-generic/ --> каталог скомпилированного исходного кода для данного ядра А нам нужен каталог для скомпилированных исходников, а именно /usr/src/linux-headers-4.4.0-135-generic/.
Поиск заголовочных файлов для драйверного кода осуществляется именно из этого каталога.
Параметр M=$(PWD) указывает, что вывод от компиляции драйвера попадает именно в текущий каталог.
Наконец, вот команда obj-m := hello.o, предназначенная для загрузки hello.o в hello.ko, а ko – это файл из пространства ядра.
❯ Загружаем драйвер в ядро
Вот некоторые системные команды, которые нам при этом понадобятся:
Lsmod: просмотр модуля ядра, загружаемого в настоящий момент.Insmod: загрузка модуля ядра с последующим требованием прав администратора.Rmmod: удаление модуля.
Например:
# insmod hello.ko // Load the hello.ko module into the kernel # rmmod hello // Remove the hello module from the kernelВ старых версиях ядра таким же методом загружалось и удалялось само ядро, но в новых версиях ядра Linux здесь добавляется верификация модуля. Вот в какой ситуации мы сейчас находимся:
# insmod hello.ko insmod: ERROR: could not insert module hello.ko: Required key not availableС точки зрения безопасности актуальное ядро предполагает, что данный модуль не вызывает доверия. Чтобы этот модуль мог быть загружен, его нужно подписать доверенным сертификатом.
Это можно сделать двумя способами:
- Войти в BIOS и отключить безопасную загрузку в UEFI.
- Добавить в ядро самоподписываемый сертификат, и именно с его помощью подписать модуль драйвера (подробнее об этом написано тут).
❯ View the Results

❯ Добавляем файлы устройств под /dev
Once again, we firstly provide the code, and then explain the example code.
#include <linux/init.h> #include <linux/module.h> #include <linux/kernel.h> /* printk() */ #include <linux/slab.h> /* kmalloc() */ #include <linux/fs.h> /* everything... */ #include <linux/errno.h> /* error codes */ #include <linux/types.h> /* size_t */ #include <linux/fcntl.h> /* O_ACCMODE */ #include <linux/cdev.h> #include <asm/uaccess.h> /* copy_*_user */ MODULE_LICENSE("Dual BSD/GPL"); MODULE_AUTHOR("Hcamael"); int scull_major = 0; int scull_minor = 0; int scull_nr_devs = 4; int scull_quantum = 4000; int scull_qset = 1000; struct scull_qset { void **data; struct scull_qset *next; }; struct scull_dev { struct scull_qset *data; /* Pointer to first quantum set. */ int quantum; /* The current quantum size. */ int qset; /* The current array size. */ unsigned long size; /* Amount of data stored here. */ unsigned int access_key; /* Used by sculluid and scullpriv. */ struct mutex mutex; /* Mutual exclusion semaphore. */ struct cdev cdev; /* Char device structure. */ }; struct scull_dev *scull_devices; /* allocated in scull_init_module */ /* * Follow the list. */ struct scull_qset *scull_follow(struct scull_dev *dev, int n) { struct scull_qset *qs = dev->data; /* Allocate the first qset explicitly if need be. */ if (! qs) { qs = dev->data = kmalloc(sizeof(struct scull_qset), GFP_KERNEL); if (qs == NULL) return NULL; memset(qs, 0, sizeof(struct scull_qset)); } /* Then follow the list. */ while (n--) { if (!qs->next) { qs->next = kmalloc(sizeof(struct scull_qset), GFP_KERNEL); if (qs->next == NULL) return NULL; memset(qs->next, 0, sizeof(struct scull_qset)); } qs = qs->next; continue; } return qs; } /* * Data management: read and write. */ ssize_t scull_read(struct file *filp, char __user *buf, size_t count, loff_t *f_pos) { struct scull_dev *dev = filp->private_data; struct scull_qset *dptr; /* the first listitem */ int quantum = dev->quantum, qset = dev->qset; int itemsize = quantum * qset; /* how many bytes in the listitem */ int item, s_pos, q_pos, rest; ssize_t retval = 0; if (mutex_lock_interruptible(&dev->mutex)) return -ERESTARTSYS; if (*f_pos >= dev->size) goto out; if (*f_pos + count > dev->size) count = dev->size - *f_pos; /* Find listitem, qset index, and offset in the quantum */ item = (long)*f_pos / itemsize; rest = (long)*f_pos % itemsize; s_pos = rest / quantum; q_pos = rest % quantum; /* follow the list up to the right position (defined elsewhere) */ dptr = scull_follow(dev, item); if (dptr == NULL || !dptr->data || ! dptr->data[s_pos]) goto out; /* don't fill holes */ /* read only up to the end of this quantum */ if (count > quantum - q_pos) count = quantum - q_pos; if (raw_copy_to_user(buf, dptr->data[s_pos] + q_pos, count)) { retval = -EFAULT; goto out; } *f_pos += count; retval = count; out: mutex_unlock(&dev->mutex); return retval; } ssize_t scull_write(struct file *filp, const char __user *buf, size_t count, loff_t *f_pos) { struct scull_dev *dev = filp->private_data; struct scull_qset *dptr; int quantum = dev->quantum, qset = dev->qset; int itemsize = quantum * qset; int item, s_pos, q_pos, rest; ssize_t retval = -ENOMEM; /* Value used in "goto out" statements. */ if (mutex_lock_interruptible(&dev->mutex)) return -ERESTARTSYS; /* Find the list item, qset index, and offset in the quantum. */ item = (long)*f_pos / itemsize; rest = (long)*f_pos % itemsize; s_pos = rest / quantum; q_pos = rest % quantum; /* Follow the list up to the right position. */ dptr = scull_follow(dev, item); if (dptr == NULL) goto out; if (!dptr->data) { dptr->data = kmalloc(qset * sizeof(char *), GFP_KERNEL); if (!dptr->data) goto out; memset(dptr->data, 0, qset * sizeof(char *)); } if (!dptr->data[s_pos]) { dptr->data[s_pos] = kmalloc(quantum, GFP_KERNEL); if (!dptr->data[s_pos]) goto out; } /* Write only up to the end of this quantum. */ if (count > quantum - q_pos) count = quantum - q_pos; if (raw_copy_from_user(dptr->data[s_pos]+q_pos, buf, count)) { retval = -EFAULT; goto out; } *f_pos += count; retval = count; /* Update the size. */ if (dev->size < *f_pos) dev->size = *f_pos; out: mutex_unlock(&dev->mutex); return retval; } /* Beginning of the scull device implementation. */ /* * Empty out the scull device; must be called with the device * mutex held. */ int scull_trim(struct scull_dev *dev) { struct scull_qset *next, *dptr; int qset = dev->qset; /* "dev" is not-null */ int i; for (dptr = dev->data; dptr; dptr = next) { /* all the list items */ if (dptr->data) { for (i = 0; i < qset; i++) kfree(dptr->data[i]); kfree(dptr->data); dptr->data = NULL; } next = dptr->next; kfree(dptr); } dev->size = 0; dev->quantum = scull_quantum; dev->qset = scull_qset; dev->data = NULL; return 0; } int scull_release(struct inode *inode, struct file *filp) { printk(KERN_DEBUG "process %i (%s) success release minor(%u) file\n", current->pid, current->comm, iminor(inode)); return 0; } /* * Open and close */ int scull_open(struct inode *inode, struct file *filp) { struct scull_dev *dev; /* device information */ dev = container_of(inode->i_cdev, struct scull_dev, cdev); filp->private_data = dev; /* for other methods */ /* If the device was opened write-only, trim it to a length of 0. */ if ( (filp->f_flags & O_ACCMODE) == O_WRONLY) { if (mutex_lock_interruptible(&dev->mutex)) return -ERESTARTSYS; scull_trim(dev); /* Ignore errors. */ mutex_unlock(&dev->mutex); } printk(KERN_DEBUG "process %i (%s) success open minor(%u) file\n", current->pid, current->comm, iminor(inode)); return 0; } /* * The "extended" operations -- only seek. */ loff_t scull_llseek(struct file *filp, loff_t off, int whence) { struct scull_dev *dev = filp->private_data; loff_t newpos; switch(whence) { case 0: /* SEEK_SET */ newpos = off; break; case 1: /* SEEK_CUR */ newpos = filp->f_pos + off; break; case 2: /* SEEK_END */ newpos = dev->size + off; break; default: /* can't happen */ return -EINVAL; } if (newpos < 0) return -EINVAL; filp->f_pos = newpos; return newpos; } struct file_operations scull_fops = { .owner = THIS_MODULE, .llseek = scull_llseek, .read = scull_read, .write = scull_write, // .unlocked_ioctl = scull_ioctl, .open = scull_open, .release = scull_release, }; /* * Set up the char_dev structure for this device. */ static void scull_setup_cdev(struct scull_dev *dev, int index) { int err, devno = MKDEV(scull_major, scull_minor + index); cdev_init(&dev->cdev, &scull_fops); dev->cdev.owner = THIS_MODULE; dev->cdev.ops = &scull_fops; err = cdev_add (&dev->cdev, devno, 1); /* Fail gracefully if need be. */ if (err) printk(KERN_NOTICE "Error %d adding scull%d", err, index); else printk(KERN_INFO "scull: %d add success\n", index); } void scull_cleanup_module(void) { int i; dev_t devno = MKDEV(scull_major, scull_minor); /* Get rid of our char dev entries. */ if (scull_devices) { for (i = 0; i < scull_nr_devs; i++) { scull_trim(scull_devices + i); cdev_del(&scull_devices[i].cdev); } kfree(scull_devices); } /* cleanup_module is never called if registering failed. */ unregister_chrdev_region(devno, scull_nr_devs); printk(KERN_INFO "scull: cleanup success\n"); } int scull_init_module(void) { int result, i; dev_t dev = 0; /* * Get a range of minor numbers to work with, asking for a dynamic major * unless directed otherwise at load time. */ if (scull_major) { dev = MKDEV(scull_major, scull_minor); result = register_chrdev_region(dev, scull_nr_devs, "scull"); } else { result = alloc_chrdev_region(&dev, scull_minor, scull_nr_devs, "scull"); scull_major = MAJOR(dev); } if (result < 0) { printk(KERN_WARNING "scull: can't get major %d\n", scull_major); return result; } else { printk(KERN_INFO "scull: get major %d success\n", scull_major); } /* * Allocate the devices. This must be dynamic as the device number can * be specified at load time. */ scull_devices = kmalloc(scull_nr_devs * sizeof(struct scull_dev), GFP_KERNEL); if (!scull_devices) { result = -ENOMEM; goto fail; } memset(scull_devices, 0, scull_nr_devs * sizeof(struct scull_dev)); /* Initialize each device. */ for (i = 0; i < scull_nr_devs; i++) { scull_devices[i].quantum = scull_quantum; scull_devices[i].qset = scull_qset; mutex_init(&scull_devices[i].mutex); scull_setup_cdev(&scull_devices[i], i); } return 0; /* succeed */ fail: scull_cleanup_module(); return result; } module_init(scull_init_module); module_exit(scull_cleanup_module);
❯ Классификация драйверов
Драйверы делятся на три категории: символьные устройства, блочные устройства и сетевые интерфейсы. В вышеприведённом коде было разобрано символьное устройство, а обсуждение двух других категорий выходит за рамки этой статьи.
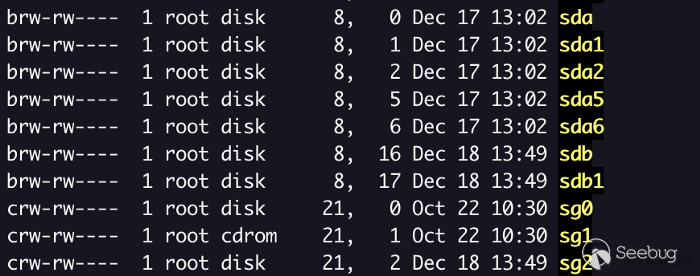
Как было показано выше, brw-rw-- — строка о правах доступа для блочных устройств начинается с буквы «b», а для символьных устройств начинается с буквы «c».
❯ О старших и младших числах
Старшее число отличает один драйвер от всех остальных. В принципе, если старшее число у устройств совпадает, это означает, что они управляются одним и тем же драйвером.
В одном каталоге drive может быть создано множество устройств, и отличаться они будут младшими числами. Вместе старшее и младшее число характеризуют устройство, управляемое драйвером (как показано выше).
brw-rw---- 1 root disk 8, 0 Dec 17 13:02 sda brw-rw---- 1 root disk 8, 1 Dec 17 13:02 sda1 Старшее число аппаратуры sda и sda1 это 8, а младших чисел здесь два: у одного устройства 0, а у другого 1.
❯ Как драйвер предоставляет API
Я привык считать, что /dev/xxx – это интерфейс, предоставляемый файлом, а в Linux «всё – файл». Поэтому, оперируя драйвером, мы, фактически, оперируем файлом, и именно в драйвере определяется define/open/read/write… что произойдёт с /dev/xxx. Любые мыслимые действия с API драйвера – это операции над файлами.
Какие операции над файлами здесь присутствуют? Все они определяются в структуре file_operations в заголовочном файле ядра <linux/fs.h>.
В коде, приведённом выше в качестве примера:
struct file_operations scull_fops = { .owner = THIS_MODULE, .llseek = scull_llseek, .read = scull_read, .write = scull_write, .open = scull_open, .release = scull_release, };Я определяю структуру и присваиваю её. Не считая owner, значения всех остальных членов – это указатели функций.
Затем я применяю cdev_add, чтобы зарегистрировать структуру для файловых операций под каждый драйвер, это делается в функции scull_setup_cdev.
Например, совершая операцию “open” (открыть) с устройством под управлением драйвера, я выполняю функцию scull_open, что эквивалентно «перехвату» функции open в системном вызове.
❯ Как сгенерировать нужное нам устройство под /dev
Скомпилировав вышеприведённый код, получим scull.ko, затем подпишем его и, наконец, загрузим в ядро при помощи insmod.
Проверим, удачно ли он загрузился:
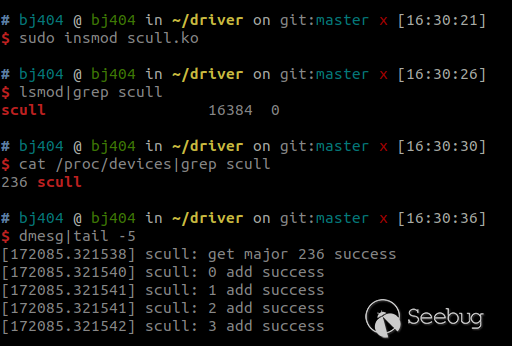
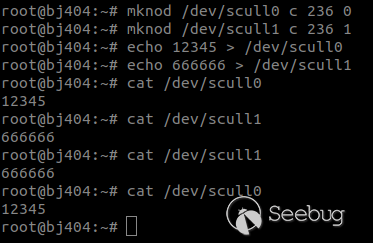
Да, драйвер устройства загрузился успешно, но он не создаёт файла устройства в каталоге /dev. Необходимо вручную воспользоваться mknod для связывания устройства:
❯ Итоги
В данном примере мы не совершали никаких операций с конкретным устройством, а просто воспользовались kmalloc, и с его помощью применили блок памяти в пространстве ядра.
Далее не буду вдаваться в детали о коде, все их можно уточнить, погуглив информацию или изучив заголовочные файлы.
В этой статье я хотел поделиться с вами, как самостоятельно научиться разрабатывать драйвера: сначала читать книги, чтобы усвоить базовые концепции, а затем искать информацию по конкретным деталям, когда дойдёт дело до практического применения.
Например, я не знаю, какой API может предоставить драйвер. Всё, что мне нужно знать – что такой API ограничивается файловыми операциями. На данный момент мне понадобятся только операциями open, close, read и write. Как делаются другие операции с файлами – можно уточнить при необходимости.
Ссылки
- github.com/jesstess/ldd4
- raw.githubusercontent.com/Hcamael/Linux_Driver_Study/master/hello.c
- jin-yang.github.io/post/kernel-modules.html
- raw.githubusercontent.com/Hcamael/Linux_Driver_Study/master/scull.c
- raw.githubusercontent.com/torvalds/linux/master/include/linux/fs.h

ссылка на оригинал статьи https://habr.com/ru/company/timeweb/blog/724282/
Добавить комментарий