Всем привет, в предыдущей статье я начал описывать мой опыт разработки Python телеграм-бота для проверки работоспособности и мониторинга моего сервиса, расположенного на удаленом сервере. Если в двух словах, то когда делаешь какой-нибудь пет-проект, да и в некоторых рабочих задачах, бывает хочется иметь всю текущую информацию по состоянию системы под рукой (особенно мне нравится возможность видеть все и управлять через телеграм бота), при этом не хочется тратить на разработку много времени.
В предыдущей части мы рассматривали способ получить мгновенные метрики по запросу. В этой части мы будем делать простой алертинг, то есть получение сообщения в боте, когда в системе начались сбои. А в следующей третьей части разберем еще случай сбора аналитики и получения онлайн графиков.

Как и в прошлой части пример будет основан на реальной задаче, но я буду помечать те места в коде, которые вы можете поменять на свою логику, чтобы основную часть примера можно было переиспользовать.
В данном случае мне необходимо получить алерт в виде сообщения в телеграм боте в том случае, если интересующая меня нода потеряла связь с сетью (или по какой-то другой причине), но ее последний засинхронизированный блок отстает от последнего блока сети.
Как и в прошлый раз сначала необходимо настроить виртуальное окружение:
cd ~ virtualenv -p python3.8 up_env # создаем окружение source ~/up_env/bin/activate # активируем окружениеи устанавливить необходимые зависимости:
pip install python-telegram-bot pip install "python-telegram-bot[job-queue]" --pre pip install --upgrade python-telegram-bot==13.6.0 # код написан во времена до версии 20, поэтому здесь версия указывается явно pip install numpy # нужна для функции получения медианного значения pip install web3 # нужна для запросов к нодам (замените на то, что необходимо вам)Файл с функциями functions.py не претерпевает в данном случае изменений и остается таким же, как в предыдущей части:
# импортируем необходимые библиотеки import numpy as np from web3 import Web3 import multiprocessing # Вспомогательная функция, которая проверяет отдельно одну ноду def get_last_block_once(rpc): try: w3 = Web3(Web3.HTTPProvider(rpc)) block_number = w3.eth.block_number if isinstance(block_number, int): return block_number else: return None except Exception as e: print(f'{rpc} - {repr(e)}') return None # Основная функция проверки состояния сервиса, которая будет вызываться # из основного потока бота def check_service(): # заранее подготовленный список референсных нод # для любой сети его можно найти на сайте https://chainlist.org/ list_of_public_nodes = [ 'https://polygon.llamarpc.com', 'https://polygon.rpc.blxrbdn.com', 'https://polygon.blockpi.network/v1/rpc/public', 'https://polygon-mainnet.public.blastapi.io', 'https://rpc-mainnet.matic.quiknode.pro', 'https://polygon-bor.publicnode.com', 'https://poly-rpc.gateway.pokt.network', 'https://rpc.ankr.com/polygon', 'https://polygon-rpc.com' ] # параллельная обработка запросов ко всем нодам with multiprocessing.Pool(processes=len(list_of_public_nodes)) as pool: results = pool.map(get_last_block_once, list_of_public_nodes) last_blocks = [b for b in results if b is not None and isinstance(b, int)] # определени максимального и мединного значения текущего блока med_val = int(np.median(last_blocks)) max_val = int(np.max(last_blocks)) # определение количества нод с максимальным и медианным значением med_support = np.sum([1 for x in last_blocks if x == med_val]) max_support = np.sum([1 for x in last_blocks if x == max_val]) return max_val, max_support, med_val, med_support Теперь рассмотрим основной файл бота alert_bot.py. Так как в разных задачах может потребоваться только алертинг или только запрос мгновенных значений, то я не собираю бота, который может все и сразу, а наоборот разделяю этот функционал на разные маленькие примеры. В данном случае код основного файла бота будет включать в себя только алертинг, но вы можете объединить все, что необходимо в один бот.
Итак, импортируем библиотеки и функции из файла выше и задаем необходимые константы:
import telegram from telegram.ext import Updater from functions import get_last_block_once, check_service # Адрес ноды, состояние которой я отслеживаю (тоже публичная нода в данном случае) OBJECT_OF_CHECKING = 'https://polygon-mainnet.chainstacklabs.com' # Порог для подсвечивания критического отставания THRESHOLD = 5 # ID вашего аккаунта в телеграм. Проще всего узнать через бота @chatIDrobot USER_ID = 123456789 Далее описываем функцию, которая будет вызвана регулярно по таймеру:
def check_for_alert(context): # Вызов основной функции проверки состояния сети max_val, max_support, med_val, med_support = check_service() # Вызов функции проверки состояния проверяемой ноды last_block = get_last_block_once(OBJECT_OF_CHECKING) # Формирование сообщения для отправки в телеграм message = "" # Информация о состоянии нод во внешней сети (медиана, максимум и количество нод) message += f"Public median block number {med_val} (on {med_support}) RPCs\n" message += f"Public maximum block number +{max_val - med_val} (on {max_support}) PRCs\n" # данная переменная будет хранить решение, отправлять ли алерт # в случае, если нода отстает или не ответила to_send = False # проверка состояния if last_block is not None: out_text = str(last_block - med_val) if last_block - med_val < 0 else '+' + str(last_block - med_val) # Сравнение с порогом if abs(last_block - med_val) > THRESHOLD: to_send = True message += f"The node block number shift ⚠️<b>{out_text}</b>⚠️" else: message += f"The node block number shift {out_text}" else: # Обработка исключения, если нода не ответила to_send = True message += f"The node has ⚠️<b>not responded</b>⚠️" # срабатываение алерта и отправка сообщения пользователю if to_send: context.bot.send_message(chat_id=USER_ID, text=message, parse_mode="HTML")Далее остается только дописать часть, в которой инициализируется бот и к нему подключается регулярная «джоба», проверяющая состояние ноды:
# Токен вашего телеграм бота, полученный через BotFather token = "xxx" # создание экземпляра бота bot = telegram.Bot(token=token) updater = Updater(token=token, use_context=True) dispatcher = updater.dispatcher job_queue = updater.job_queue # Здесь переменной interval (в секундах) задается периодичность # запуска проверки состояния - в данном случае каждые 10 минут job_queue.run_repeating(check_for_alert, interval=10.0 * 60.0, first=0.0) # запуск бота updater.start_polling()Далее код можно запустить на любом VPS сервере через:
source ~/up_env/bin/activate python uptime_bot.pyПредварительно настроив systemd unit-файл.
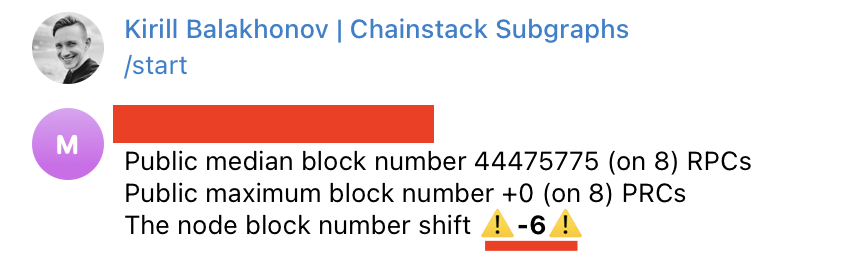
В итоге работа бота будет выглядеть следующим образом — если алерт сработал, я получаю сообщение с информацией о проблеме:
В следующей статье я опишу, как можно реализовать оставшуюся задачу:
-
По запросу получить графики, как все происходило в течение последних X часов. Она будет состоять из двух частей: скрипта для логирования запускаемого по cron’у и бота, собирающего графики из логов по запросу пользователя
Исходный код проекта доступен в репозитории на GitHub. Если этот туториал показался вам полезным, не стесняйтесь поставить звезду на гитхабе, мне будет приятно?
ссылка на оригинал статьи https://habr.com/ru/articles/745280/
Добавить комментарий