
«По сути, наша работа посвящена тому, как спроектировать спонтанное переключение поведения, используя хаотическую динамику», — говорит соавтор Кохей Накадзима, прикладной математик из Токийского университета в Японии. Обычно инженеры разрабатывают робота, который будет ходить и бегать, и экспериментатор в таком случае мог бы использовать внешний портативный контроллер для переключения этих “поведений”. Но чтобы совершить скачок от такой контролируемой обстановки к той, в которой робот может автономно переключать поведение, исследователи стремились имитировать хаотическое передвижение. Часто наблюдаемый в мозгу животных и других динамических системах хаотическая маршрутизация возникает, когда система непредсказуемо, но детерминированно переключается между несколькими стереотипными паттернами, будь то ходьба, бег или любые другие формы поведения.

Опыт прошлого
Робототехники и раньше стремились имитировать хаотическое передвижение, отмечает ведущий автор исследования Кацума Иноуэ, аспирант Токийского университета. Один робот, созданный в 2006 году, моделировал младенца человека с соматосенсорной системой и сотнями двигателей, представляющих мышцы тела, каждый из которых был подключен к нескольким хаотическим осцилляторам — грубому эквиваленту двигательных нейронов. Соматосенсорные системы взаимодействуют с хаотическими осцилляторами, которые затем сигнализируют «мускулам» о движении. Разработанная для имитации раннего развития моторики человека, система воспроизводила движения, похожие на хаотические передвижения, путем чередования нескольких стереотипных форм поведения, включая ползание и переворачивание.
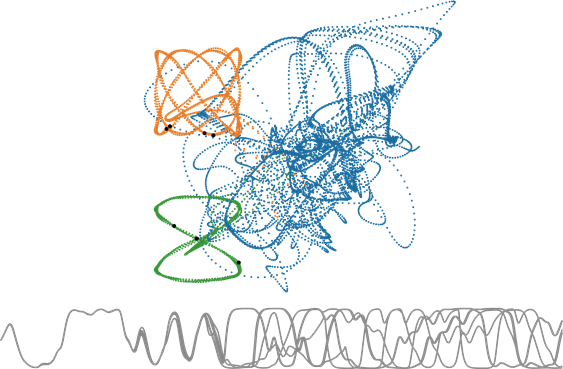
Синие, оранжевые и зеленые фигуры на этом изображении представляют различные варианты поведения, которые авторы разработали для своего мозга-робота, чтобы переключаться между ними автономно. Для этого исследователи создали особенности феномена, называемого хаотическим перемещением. Изображение из доклада “Designing spontaneous behavioral switching via chaotic itinerancy” (Кацума Иноуэ, Кохей Накадзима и Ясуо Куниёси).
Другие исследования были направлены на разработку спонтанного переключения поведения в роботах с использованием иерархической структуры с нейронной сетью более высокого уровня, управляющей модулями более низкого уровня, которые соответствуют каждому типу поведения. Однако, по мнению Кохей Накадзима, в этих экспериментах довольно много времени занимает процесс обучения.
Чем система уникальна?
Чтобы преодолеть эти проблемы, японские исследователи не использовали иерархический дизайн. Вместо этого в трехэтапном методе с использованием структуры машинного обучения исследователи сначала определили несколько возможных вариантов поведения и обучили нейронную сеть воспроизводить их в соответствии с командами. Затем исследователи обучили сеть переключаться между этими поведениями в определенном порядке и, наконец, разработали вероятностные переходы между этими поведениями, используя хаотическую динамику. В результате появилась система с особенностями хаотичного передвижения.

(A) Схематическая диаграмма многомерной хаотической системы, подготовленной в наших экспериментах. Систему можно разделить на две части: сеть состояний входного эхо-сигнала (ESN) и хаотическая ESN. Входной ESN действует как интерфейс между дискретным входом и хаотическим ESN, генерируя динамику переходных процессов, проецируемую на хаотический ESN при переключении символьного входа. Чтобы предотвратить превращение хаотического ESN в нехаотический из-за бифуркации, соединение между входным ESN и хаотическим ESN обучается так, чтобы выходная динамика переходных процессов сходилась к 0. (B) Две экспериментальные схемы. В схеме с обратной связью символический ввод предоставляется извне. С другой стороны, в замкнутом цикле символьный ввод автономно генерируется дополнительным контуром обратной связи. В данном методе меняются элементы, представленные красными стрелками, чтобы внедрить желаемую динамику CI. Схематические диаграммы методов обучения, состоящие из трехэтапной процедуры. На шаге 1 параметры сети и считыватель обучаются выводить квазиаттракторы и динамику вывода, соответствующую символам. На шагах 2 и 3 символьная последовательность создается автономно. Учёные подготовили периодические шаблоны перехода символов в качестве цели на шаге 2 и правила стохастического перехода символов на шаге 3.
Что будет дальше?
Ключевая идея исследования — создать более простой и элегантный способ реализации спонтанного типа передвижения, наподобие того, каким обладают животные. Однако реализация этого исследования пока была ограничена нейронной сетью на компьютере. Теперь исследователи планируют перейти от компьютеров к физическим роботам в надежде наконец создать машины, которые будут вести себя автономно и спонтанно.
Отличительная черта человеческого мозга, пластичность ума позволяет людям приобретать новые знания, не разрушая старые воспоминания. Учёные рассматривают это исследование как шаг к созданию синтетического мозга, который сможет иметь память, способную взаимодействовать с окружающей средой через искусственное тело.
Список литературы:
- Adam Smith. AI with “spontaneous” behaviour like animals developed [Электронный ресурс]. URL: www.independent.co.uk/life-style/gadgets-and-tech/scientists-ai-spontaneous-behaviour-animals-b1762407.html
- Amy MacDermott. New technique builds animal brain–like spontaneity into AI [Электронный ресурс]. URL: blog.pnas.org/2020/11/new-technique-builds-animal-brain-like-spontaneity-into-ai
- Официальный доклад: Katsuma Inoue, Kohei Nakajima, Yasuo Kuniyoshi. Designing spontaneous behavioral switching via chaotic itinerancy [Электронный ресурс]. URL: advances.sciencemag.org/content/advances/6/46/eabb3989.full.pdf
ссылка на оригинал статьи https://habr.com/ru/post/530654/
Добавить комментарий