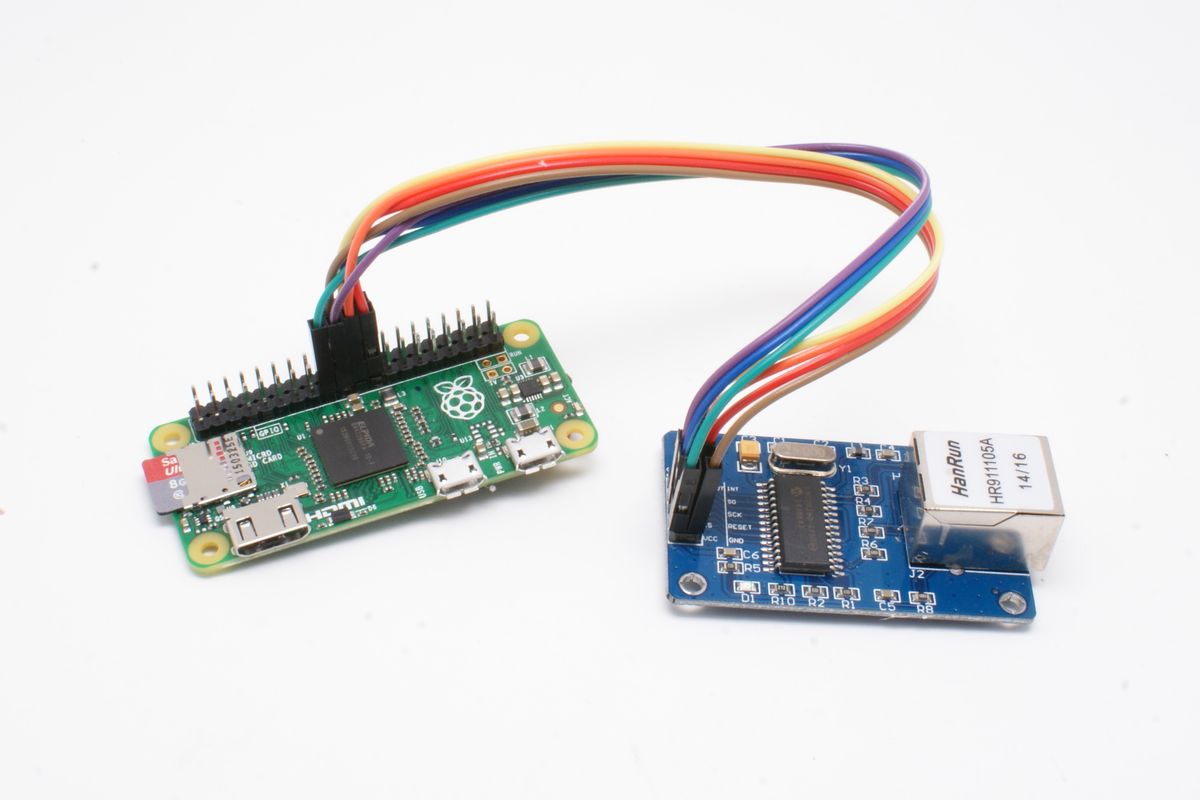
ENC28J60 — простой Ethernet контроллер, который может выступать в роли внешней сетевой карты у одноплатных компьютеров с GPIO (для raspberry есть даже готовый драйвер) и прочих ардуин. У моего лэптопа GPIO не выведены, попробуем исправить этот недостаток и прикрутить к нему ENC28J60 посредством STM32F103 и шнурка USB.
Давайте посмотрим, как это можно сделать.
Нам понадобится:
-
ENC28J60
-
Отладочная плата с STM32 с поддержкой USB device (например, вот такая):

-
Компьютер с Linux (я использую Ubuntu 16)
-
Второй компьютер с Ethernet для тестирования соединения (у меня raspberry pi), подключенный по wi-fi (и в одной локальной сети с первым)
Настройку STM32F103 описывать не буду, мануалов в сети хватает. Как и программирование самого ENC28J60 (в своем примере я использовал вот этот код c минимальными модификациями). Подключение ENC28J60 к STM32F103 по SPI1 описано там же.
Соединение
Компьютер (usb) -> stm32(SPI) -> ENC28J60(Ethernet кабель) -> raspberry

Как все работает
Обойдемся без написания драйверов ядра, будем работать в user space. На компьютере создадим виртуальный сетевой tap интерфейс (второго уровня, с заголовками Ethernet фреймов, есть еще tun интерфейсы, которые работают только с ip пакетами), к которому подсоединим нашу программу (назовем ее tap_handler.c). Чтобы фрейм попал в сетевой стек Linuxа, tap_handler’у достаточно записать его в tap интерфейс. Ну и наоборот, пакеты, адресованные tap интерфейсу, будут читаться tap_handler’ом, который может с ними что-то дальше сделать. В итоге, tap_handler бегает в бесконечном цикле и ждет появления данных либо со стороны tap интерфейса, либо со стороны /dev/ttyACM0 (это представление нашего USB девайса в Linuxе). В первом случае полученные данные пишем в /dev/ttyACM0, во втором в tap интерфейс.
Более подробно про работу с виртуальными интерфейсами написано здесь (для демонстрации работы vpn). Отсюда же я взял код, отвечающий за работу с виртуальными интерфейсами.
На STM32 при помощи CubeMX подключаем библиотеки для работы с USB CDC (virtual com port). После подключения SMT32 к компу Linux создаст файл /dev/ttyACM0 (ну или другой номер). Из этого файла можно прочитать данные, которые нам отправил STM32, а если записать туда данные, их сможет прочитать STM32.
Прошивка STM32 работает аналогично. В бесконечном цикле читаем данные с компа (функция CDC_Receive_FS в файле usbd_cdc_if.c) и записываем их в ENC28J60, который уже передает их дальше в сеть, а также считываем фреймы из ENC28J60 и направляем их в комп функцией CDC_Transmit_FS.
Насколько я понимаю, CDC должен передавать данные без ошибок. Однако я столкнулся с тем, что ошибки все же есть. Более того, первый пакет обычно всегда дублируется (причину я не нашел, дубляж виден в том числе в wireshark при прослушивании шины usb). Гуглеж показал, что у кого-то это происходило из-за использования неподабающего генератора частоты на STM32, что вряд ли является причиной проблемы в моем случае, т.к. я просто использовал внешний кварц. Поэтому и пришлось городить огород с метками.
Работа со стороны компа
Сетевой интерфейс создаем командой:
sudo openvpn --mktun --dev tap0 Присваиваем ip адрес:
sudo ifconfig tap0 10.0.0.1/24 up tap_handler.с
Для правильной работы с /dev/ttyACM0 нужно передавать данные в raw виде и не давать драйверу терминала вносить в них изменения (например, считать нетекстовые данные управляющими символами и пр.). Настройка терминала:
char cdc_name[20]="/dev/ttyACM0"; int tty_fd = open(cdc_name, O_RDWR | O_NOCTTY); struct termios portSettings; tcgetattr(tty_fd, &portSettings); cfmakeraw(&portSettings); tcsetattr(tty_fd, TCSANOW, &portSettings); tcflush(tty_fd, TCOFLUSH); Подключаем tap_handler к tap0:
/* в dev передаем имя уже созданного интерфейса tap0*/ int tun_alloc(char *dev, int flags) { struct ifreq ifr; int fd, err; char *clonedev = "/dev/net/tun"; /* отталкиваемся от устройства /dev/net/tun */ if( (fd = open(clonedev , O_RDWR)) < 0 ) { perror("Opening /dev/net/tun"); return fd; } memset(&ifr, 0, sizeof(ifr)); ifr.ifr_flags = flags; /* используем уже созданный tap0 */ if (*dev) { strncpy(ifr.ifr_name, dev, IFNAMSIZ); } /* подсоединяемся к интерфейсу */ if( (err = ioctl(fd, TUNSETIFF, (void *)&ifr)) < 0 ) { perror("ioctl(TUNSETIFF)"); close(fd); return err; } strcpy(dev, ifr.ifr_name); return fd; }Вызываем эту функцию в main.c следующим образом:
strcpy(tun_name, "tap0"); int tap_fd = tun_alloc(tun_name, IFF_TAP | IFF_NO_PI); Флаг IFF_TAP указывает на тип интерфейса (tap). Флаг IFF_NO_PI нужен, чтобы ядро не добавляло префиксные байты перед началом пакета.
Проверяем наличие данных в tap0 и в /dev/ttyACM0. Пока данных нет, tap_handler находится в блокирующем select:
while(1) { int ret; fd_set rd_set; FD_ZERO(&rd_set); /* tap_fd - tap inteface descriptor */ FD_SET(tap_fd, &rd_set); /* tty_fd - /dev/ttyACM0 descriptor */ FD_SET(tty_fd, &rd_set); ret = select(maxfd + 1, &rd_set, NULL, NULL, NULL);После получения данных проверяем источник. При получении фрейма от tap0 tap_handler формирует пакет для STM32 (структура пакета: пакет начинается с метки — определенных 4 байт, чтобы идентифицировать начало фрейма, следующие 2 байта — длина фрейма, затем уже сам фрейм) и записывает его в /dev/ttyACM0. Затем небольшая задержка, чтобы данные прошли успешно:
if(FD_ISSET(tap_fd, &rd_set)) { uint16_t nread = cread(tap_fd, buffer, BUFSIZE); uint8_t buf[6]; *(uint32_t *)buf = PACKET_START_SIGN; *(uint16_t *)(buf + 4) = nread; cwrite(tty_fd,(char *)buf,6); cwrite(tty_fd, buffer, nread); delay_micro(delay_m); }Если есть данные в /dev/ttyACM0, убеждаемся что они начинаются с правильной метки (те же 4 байта), затем считываем длину фрейма, и потом сам фрейм. Полученный фрейм записываем в tap интерфейс:
if(FD_ISSET(tty_fd, &rd_set)) { uint32_t sign; /* считываем метку */ int nread = read_n(tty_fd, (char *)&sign, sizeof(sign)); /* дескриптор закрыт, выходим из программы */ if(nread == 0) { break; } /* если не совпадает, пытаемся найти подпись в следующих 4 байтах */ if(sign != PACKET_START_SIGN){ continue; } /* читаем длину фрейма */ nread = read_n(tty_fd, (char *)&plength, 2); if(nread == 0) { break; } if (nread != 2){ continue; } /* здесь обрабатываем ситуацию, когда после запуска программы первый пакет дублируется */ if(flag){ flag = 0; nread = cread(tty_fd, buffer, sizeof(buffer)); if(nread != 6){ continue; } } /* слишком большая длина пакета, заканчиваем программу */ if(plength > BUFSIZE){ break; } /* читаем фрейм (plength байт) и пишем его в tap interface*/ nread = read_n(tty_fd, buffer, plength); if (nread != 0){ cwrite(tap_fd, buffer, nread); delay_micro(delay_m); } }Со стороны STM32
Кроме USB CDC в CubeMX подключим также HAL драйверы для работы с SPI1 и светодиодом.
Прием данных выполняется в callback’е CDC_Receive_FS (файл usbd_cdc_if.c), запуск которого инициируется прерываниями в библиотеке USB. В этом месте нельзя ставить долгоиграющие операции, поэтому пришедшие данные копируем в кольцевой буфер, из которого забираем их в основном цикле и отправляем наружу через ENC28J60. При риске переполнения буфера данные отбрасываются:
/* USB_POINTERS_ARRAY_SIZE - размер array_pos */ /* MAX_FRAMELEN - максимальная длина фрейма */ /* USB_BUFSIZE - размер кольцевого буфера */ extern uint8_t usb_buf[]; /* кольцевой буфер для полученных от компа данных */ extern uint32_t pos_int; /* индекс для размещения следующего пакета в кольцевом буфере */ extern uint32_t array_pos[]; /* кольцевой массив из индексов, которые указывают на полученные пакеты в кольцевом буфере */ extern uint32_t p_a; /* индекс следующей записи в array_pos для CDC_Receive_FS*/ extern uint32_t pl_a;/* индекс следующей записи в array_pos у основного потока */ /* USB_POINTERS_ARRAY_SIZE - размер array_pos */ /* MAX_FRAMELEN - максимальная длина фрейма */ /* USB_BUFSIZE - размер кольцевого буфера */ static int8_t CDC_Receive_FS(uint8_t* Buf, uint32_t *Len) { int8_t memok = 1; /* отбрасываем пришедшие данные, если не хватает места в кольцевом буфере */ if( pl_a !=0 && p_a !=0){ int32_t mem_lag = array_pos[(p_a - 1) % USB_POINTERS_ARRAY_SIZE] - array_pos[(pl_a - 1) % USB_POINTERS_ARRAY_SIZE]; if(mem_lag > USB_BUFSIZE - MAX_FRAMELEN) memok = 0; } /* Копируем поступившие данные в кольцевой буфер, обновляем массив индексов пришедших пакетов (array_pos) */ if(*Len < USB_BUFSIZE && *Len != 0 && memok){ uint16_t offset = pos_int % USB_BUFSIZE; uint16_t new_pos = offset + *Len; uint8_t split = 0; if (new_pos > USB_BUFSIZE){ split = 1; } if(split){ int len1 = USB_BUFSIZE - offset; int len2 = *Len - len1; memcpy(usb_buf + offset, Buf, len1); memcpy(usb_buf, Buf + len1, len2); } else memcpy(usb_buf + offset, Buf, *Len); pos_int += *Len; array_pos[p_a % USB_POINTERS_ARRAY_SIZE] = pos_int; p_a++; } USBD_CDC_SetRxBuffer(&hUsbDeviceFS, &Buf[0]); USBD_CDC_ReceivePacket(&hUsbDeviceFS); return (USBD_OK); }В основном потоке (main.c) смотрим на наличие данных в буфере и отправляем их через ENC28J60:
if(pl_a < p_a){ uint32_t prev = 0; if(pl_a > 0) prev = array_pos[(pl_a - 1) % USB_POINTERS_ARRAY_SIZE]; /* размер пакета (кусочек фрейма), принятого в CDC_Receive_FS */ int32_t n = array_pos[pl_a % USB_POINTERS_ARRAY_SIZE] - prev;//usb frame size /* указатель на пакет в буфере */ uint8_t *from = usb_buf + prev % USB_BUFSIZE; /* признак корректности пакета */ uint8_t right_n = 1; if (n < 0 || n > MAX_FRAMELEN){ right_n = 0; } /* проверка на новый фрейм. В пакете должно быть минимум 6 байтов (подпись 4 байта и 2 байта длина) */ if((packet_len == 0) && packet_start && (n > 5) && right_n){ /* спец. функция для чтения из кольцевого буфера */ uint32_t sign = read32(from,usb_buf); /* получаем указатель на данные через 4 байта */ uint8_t *next = next_usb_ptr(from,usb_buf,4); /* читаем размер фрейма */ packet_size = read16(next,usb_buf);// 2 bytes after sign is packet length /* отбрасываем неправильный пакет */ if (packet_size > MAX_FRAMELEN || sign != PACKET_START_SIGN){ packet_size = 0; } else{ /* копируем принятый пакет данных в буфер фрейма */ next = next_usb_ptr(from,usb_buf,6); copy_buf(packet_buf, next, usb_buf, n - 6); packet_len = n - 6; packet_next_ptr = packet_buf + packet_len; packet_start = 0; } } /* обрабатываем последующие пакеты в фрейме */ else if(packet_len < packet_size && right_n){ /* копируем принятый пакет данных в буфер фрейма */ copy_buf(packet_next_ptr, from, usb_buf, n); packet_len += n; packet_next_ptr = packet_buf + packet_len; } /* отбрасываем ошибочный фрейм */ else if (packet_len > packet_size){ packet_len = 0; packet_start = 1; } /* отправляем фрейм через enc28j60 */ if(packet_len == packet_size && packet_size > 0){ enc28j60_packetSend(packet_buf, packet_size); packet_len = 0; packet_start = 1; } pl_a++; }а также проверяем наличие данных в ENC28J60 и при наличии отправляем их в USB и мигаем светодиодом:
len = enc28j60_packetReceive(net_buf,sizeof(net_buf)); if (len > 0) { *((uint16_t*)(sign_buf + 4)) = len; while(CDC_Transmit_FS(sign_buf, sizeof(sign_buf)) == USBD_BUSY_CDC_TRANSMIT); while(CDC_Transmit_FS(net_buf, len) == USBD_BUSY_CDC_TRANSMIT); HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); }В CDC_Transmit_FS я немного изменил код, чтобы функцию можно было поместить в while. В этом месте CDC_Transmit_FS возвращаем новый статус USBD_BUSY_CDC_TRANSMIT вместо просто USBD_BUSY. Без изменений узнать приняты ли данные к отправке мне не удалось:
if (hcdc->TxState != 0){ return USBD_BUSY_CDC_TRANSMIT; } В функции инициализации ENC28J60 enc28j60_ini нужно разрешить принимать и передавать любые фреймы, не только адресованные ему (promiscuous mode):
enc28j60_writeRegByte(ERXFCON,0); Настройка и проверка
Raspberry
Поднимаем eth0 и устанавливаем ip адрес. Запускаем ping
sudo ifconfig eth0 up 10.0.0.2/24 ping 10.0.0.2 В другом окне можно и tcpdump:
sudo tcpdump -i eth0 Комп
Подсоединяем прошитый STM32 к компу, соединяем ENC28J60 сетевым кабелем с raspberry. На STM32 начинает мигать светодиод, показывая приход arp / icmp пакетов (от ping). Убеждаемся, что появился /dev/ttyACM0:
ls /dev/ttyACM* Компилируем и запускаем tap_handler:
gcc tap_handler.c -o tap_handler ./tap_handler tap_handler запускает всю цепочку — подхватывает приходящие пакеты от raspberry, адресует их tap0, получает от него фрейм в ответ, шлет его STM32, когда фрейм доходит до raspberry мы видим, что пинги начинают проходить.
Делаем интернет на компе
Если пинги проходят проверяем работу нашей сетевой карты.
Комп
Я подсоединился к raspberry по ssh через wi-fi и управляю им с компа, соединение нам терять не стоит, поэтому просто меняем default gateway. Браузер перестает работать, но соединение с raspberry не теряется:
sudo route del default gateway 192.168.1.1 sudo route add default gateway 10.0.0.2 Может потребоваться корректировка DNS сервера (в /etc/resolv.conf нужно прописать в качестве nameserver, например, 8.8.8.8).
Raspberry
Разрешаем переход пакетов из eth0 в wlan0 и включаем NAT:
echo 1 | sudo tee -a /proc/sys/net/ipv4/ip_forward sudo iptables -t nat -A POSTROUTING -o wlan0 -j MASQUERADE Проверяем комп. Интернет должен появиться, правда небыстрый (у меня 0.5 Мбит/с).
Можно не заморачиваться с raspberry, а напрямую подсоединить сетевой провод от рутера в ENC28J60 (нужно отключить wi-fi на компе и задать правильный адрес tap0). Но тестировать проще с raspberry, в tcpdump видно все что происходит.
Зачем все это
Использовать такую связку в жизни наверно не очень удобно (особенно при наличии недорогих usb ethernet адаптеров в продаже), но сделать ее было очень интересно. Спасибо за внимание. Ссылка на код (проект в Atollic TrueStudio).
ссылка на оригинал статьи https://habr.com/ru/post/530730/
Добавить комментарий