
Genghis («Дженгис») или «Чингис» — шестиногий робот, похожий на насекомого, который был создан робототехником Родни Бруксом из Массачусетского технологического института. Брукс хотел решить проблему того, как сделать роботов разумными, и предположил, что можно создавать роботов, демонстрирующих интеллект, с помощью «архитектуры подчинения», которая представляет собой тип реактивной роботизированной архитектуры, в которой робот может реагировать на окружающий мир. В его статье «Интеллект без репрезентации», которая до сих пор пользуется большим уважением в области робототехники и искусственного интеллекта, излагаются его теории по этому поводу.
Первоначально инженеры, стремящиеся создать роботизированный «мозг», придерживались решительно аналитического подхода. С этой традиционной точки зрения они сначала решают, что робот сможет почувствовать; затем они рассматривают, как он будет анализировать сенсорные данные и, наконец, как он будет планировать и предпринимать действия. Каждый шаг был чреват сложностями, которые могут привести к провалу.
В 1986 году Родни Брукс сформулировал свой «восходящий» подход к робототехнике. Если потребности в вычислительной мощности для моделирования интеллекта человека не удовлетворяются из-за ограниченных возможностей компьютеров, почему бы не попытаться получить разумное поведение на основе сочетания простых элементов, которые в конечном итоге превратятся в интегрированные системы в роботах и других воплощениях искусственного интеллекта? На его взгляд, если разработчики хотят сымитировать биологический интеллект, им нужно начинать с самого низкого уровня — с создания искусственных насекомых. Брукс выступал за имитирование самых простых биологических систем вместо попыток сравняться с человеком. С тех пор восходящий подход доминирует в мире искусственного интеллекта от «Сообщества разума» (The Society of Mind) Марвина Мински до более поздних работ Джеффа Хокинса и Рэя Курцвейла. Оба они утверждали, что путь к искусственному интеллекту высокого уровня следует искать в соединении простых алгоритмов, которые лежат в основе когнитивных способностей человеческого мозга.
Чтобы протестировать на практике архитектуру подчинения, Брукс и его команда из студентов начали разрабатывать роботов-инсектоидов, начиная от примитивного робота на колесах «Allen» до «Squirt», хрупкого робота размером не больше кузнечика. Но ни один из них не проиллюстрировал архитектуру подчинения хорошо так, как Genghis.
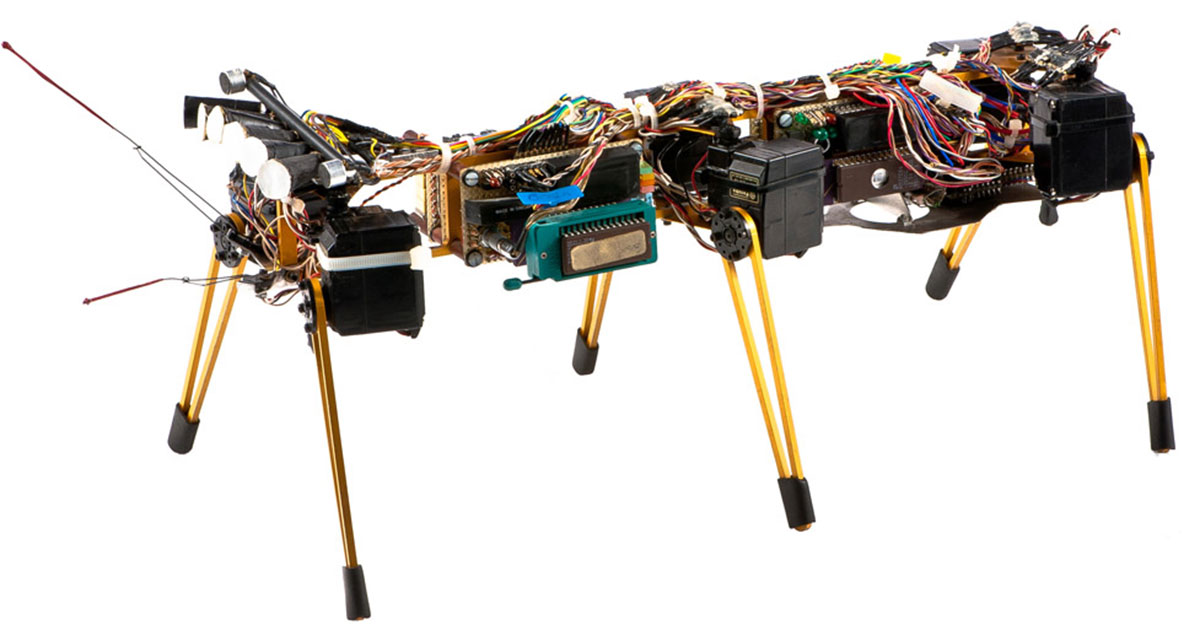
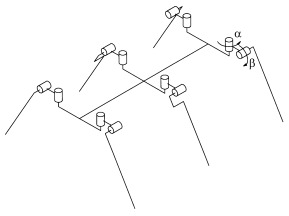
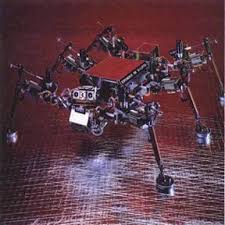
«Чингис» был весом чуть больше 900 граммов, имел три пары ног, шесть инфракрасных «глаз» и два уса. Каждая нога приводилась в движение двумя моторами: мотор-альфа двигало ногу вперед-назад; мотор-бета поднимало-опускало ногу. Между ногами располагались микрочипы, которые служили аналогом нервного центра как у насекомых. Микрочипы содержат множество расширенных конечных автоматов (AFSM).
«Чингис» стал символом нового стиля в искусственном интеллекте своего времени: «быстрый, дешевый и не требующий контроля», как следовало из названия статьи 1989 г., написанной Бруксом в соавторстве с его аспиранткой Анитой Флинн. Брукс и Флинн говорили, что самый практичный способ освоения космоса — это использование множества дешевых, подобных насекомым роботов, а не развертывание единой, технически сложной и дорогой системы.
Видение Брукса роботизированной функциональности было обусловлено желанием подражать зловещему HAL 9000 из «Космической одиссеи 2001» Стэнли Кубрика (1968). Разочарованный отсутствием общего интеллекта (возможность заходить в комнату или преодолевать препятствия), который демонстрируют роботы его коллег по отрасли, Брукс решил подойти ко всему вопросу о робототехнике иначе. Его метод работы был сосредоточен на выявлении ключевого рабочего предположения, которое все остальные принимали как должное, а затем на его опровержении! Такой образ мышления привел Брукса к созданию своей теории интеллекта «ощущение-действие». Он был вдохновлен насекомыми, которые, как он заметил, обладают гораздо менее мощным мозгом, чем его компьютерные процессоры, но при этом обладают потрясающей функциональностью. Эта линия мысли привела его к «Чингису», а позже увлечение зрением и слуховым восприятием привело его к созданию «Кисмета». На протяжении всей своей карьеры коллеги и потенциальные деловые партнеры часто высмеивали Брукса за его диковинные на тот момент теории машинного интеллекта. Однако с тех пор его исследования создали пространство для более широкого развития отрасли в масштабах модели «ощущение-действие».
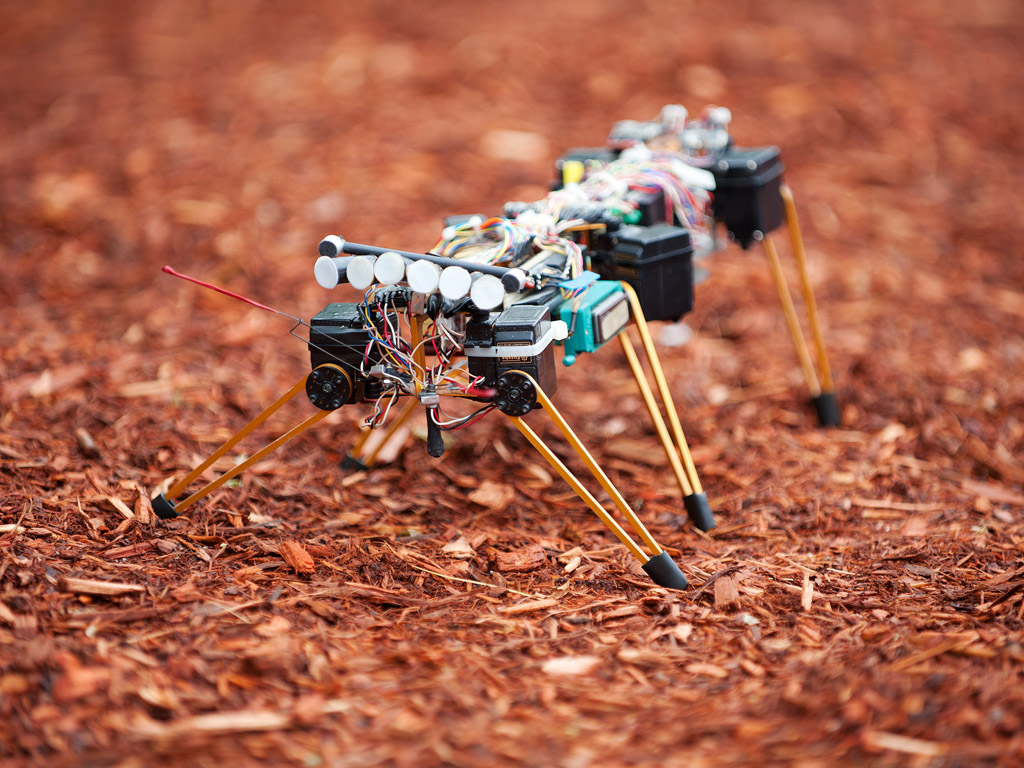
Genghis может приближаться к человеческому телу, преодолевая значительные препятствия на своем пути. «Чингис» стал результатом экспериментов Брукса, которые связали ощущения и действия более напрямую. Взглянув на насекомых как на вдохновение, Брукс создал «Чингиса», удалив все процессоры «познания» и оставив только его сенсоры (ощущения) и оборудование, позволяющие ему ходить. Это позволило «Чингису» установить беспрецедентную связь между восприятием окружающей среды и действием. Когда «Чингис» идет, он заранее не планирует свой путь. Он просто полагается на постоянную связь между восприятием и немедленным ответным действием. «Чингис» находит цель с помощью теплового датчика. Затем он движется в этом направлении, преодолевая препятствия или изменяя траекторию по мере необходимости. Чтобы достичь большей функциональности с меньшей вычислительной мощностью, Брукс внедрил метод машинного мышления, который опирался на иерархические модели данных.
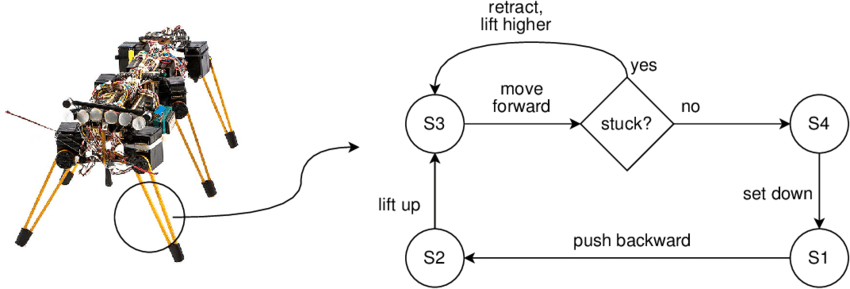
У «Чингиса» не было центрального контроллера для управления всеми возможными функциями робота, особенно в ногах. Вместо этого каждая нога имела свои собственные встроенные датчики, которые распознавали различные препятствия на своем пути. Каждая нога была запрограммирована на несколько базовых моделей поведения и знала, как реагировать в разных сценариях на основе обратной связи с сенсором. Ходьба превратилась в скоординированное усилие между всеми ногами, что привело к движению робота. Эти процессы существуют независимо, выполняются постоянно и запускаются всякий раз, когда выполняются сенсорные предварительные условия.
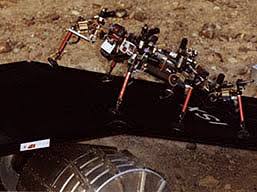
Genghis был разработан для передвижения по сложной местности с множеством препятствий и возвышенностей. Чтобы достичь этого типа функциональности при одновременном снижении общей сложности, Брукс создал метод мышления с конечным автоматом, основанный на «многоуровневой обработке»; базовое наложение новых черт на старые. В «Чингисе» система управления была организована в «восемь инкрементальных уровней: вставание, простая ходьба, балансировка силы, подъем ног, усы, стабилизация шага, красться и красться». На уровне обработки сложность каждого из восьми уровней конечного перемещения рассматривается отдельно каждым слоем, снижая нагрузку сложной обработки на процессоры на каждом уровне.
«Чингис» был не только одним из первых роботов способных ходить, но и тем, как быстро и дешево он был произведен. Тем не менее, ему нужно 4 микропроцессора, 22 датчика и 12 сервомоторов, чтобы функционировать. Его поведение состоит из более простых форм, каждое из которых состоит из комбинаторной логики. Некоторые из этих поведений связаны с датчиками, а некоторые — с двигателями. Все поведения сбрасываются, у некоторых есть память. Все модели поведения могут выполняться одновременно, в то время как более высокие уровни поведения могут подавлять более низкие.
Позднее на основе «Чингиса» Брукс спроектирует еще двух близнецов роботов: «Аттилу» и «Ганнибала». «Аттила» и «Ганнибал» были признаны одними из самых сложных автономных роботов для своего размера, обладая более 19 степенями свободы, более 60 сенсорными входами и более 8 микропроцессорами. Дизайн и конструкция этих роботов были сложной задачей, учитывая ограничения по размеру и весу системы, а также ее общую сложность. Было включено значительное резервирование оборудования в ожидании возможных сбоев во время миссии. С механической точки зрения эта избыточность выражалась в виде нескольких ног — хорошо известно, что насекомые могут передвигаться даже после потери ноги. С точки зрения восприятия избыточность принимала форму дополнительных комплектов датчиков. Сенсорные сигналы от различных типов датчиков можно комбинировать для характеристики различных типов взаимодействия ног и местности, которое используется для управления поведением робота. При использовании дополнительных комплектов датчиков, если несколько датчиков выйдут из строя в ходе миссии, оставшиеся датчики все еще могут быть использованы для надежного измерения окружающей среды. Даже при наличии нескольких преданных своему делу исследователей этап проектирования был продолжительным — начиная с лета 1989 года и продолжаясь до завершения в июне 1991 года.

Одной из важных проблем было поведение роботов в реальном времени, особенно поддержание поведения в реальном времени при масштабировании сложности системы. Важно, чтобы робот быстро реагировал на опасности и выполнял эффективные маневры уклонения. Учитывая сложность робота (большое количество датчиков и исполнительных механизмов) и довольно ограниченную вычислительную мощность, контроллер должен избегать ситуаций, которые могут снизить производительность в реальном времени. Это накладывает ограничения на алгоритмические методы, используемые для обработки восприятия и управления двигателем.
Еще одна важная проблема — передвижение по пересеченной местности. Хорошо известно, что животные с ногами способны преодолевать гораздо более пересеченную местность, чем колесные машины. Одна из причин этого заключается в том, что ноги могут справляться с неровностями местности, тогда как колесным транспортным средствам требуется более гладкая местность. Однако сложно запрограммировать роботов на ногах так, чтобы они работали так же искусно, как и их биологические аналоги. Фактически, передвижение животных по-прежнему превосходит любую существующую искусственную прогулочную машину.
Третий важный вопрос — отказоустойчивость. Любой планетоход выполняет свою миссию во враждебной среде. Вероятность возникновения механических или электронных неисправностей высока. Кроме того, никого не будет рядом, чтобы исправить ошибку. Следовательно, отказоустойчивое поведение важно для сохранения целостности миссии. Робот должен уметь обнаруживать и распознавать сбои оборудования и действовать, чтобы исправить эти сбои. В идеале, робот всегда должен поддерживать максимально высокий уровень производительности, несмотря на эти сбои.
В лаборатории была смоделирована лунная среда, названная «песочницей», чтобы проверить производительность роботов вездеходов в более реалистичных условиях. Песочница составляет около 15 футов в длину и 10 футов в ширину и состоит в основном из гравия и песка с вкраплениями нескольких более крупных камней. Роботы должны преодолевать препятствия и опасности. Эта среда тестирования помогла успешно оценить, будет ли робот адекватно работать в сценариях, которые более реалистичны, чем может предоставить типичная лабораторная среда.


NASA не приняли идею «быстрых, дешевых и не требующих контроля» роботизированных исследователей. Когда Брукс представил свое предложение Лаборатории реактивного движения, работавшие над дорогостоящей исследовательской аппаратурой, инженеры отвергли концепцию крошечного недорогого робота.
По иронии судьбы годы спустя разработчики марсохода NASA Sojourner, доставленного на Марс в 1997 году, позаимствовали многие идеи Брукса. Хотя Родни Брукс так и не добрался до космоса, чуть больше десятилетия спустя его подход найдет коммерческую нишу. Компания iRobot, преемница космического предприятия Брукса, успешно вывела на потребительский рынок автономный пылесос Roomba, а ее модифицированный для военных целей аппарат нашел применение в Афганистане и Ираке для поиска взрывных устройств.

Сотрудничая c NASA, iRobot представил первые наземные роботы, используемые вооруженными силами США, разработал первые самоходные роботы, одобренные FDA (Федеральное Управление по санитарному надзору за качеством пищевых продуктов и медикаментов), для больниц. В 1998 году iRobot заключили контракт с DARPA на создание тактического мобильного робота PackBot. 11 сентября 2001 года он разгребал завалы во Всемирном торговом центре, а в 2002 — был принят на вооружение армии США.

Сегодня «Чингис, Аттила и Ганнибал» хранятся в Смитсоновском национальном музее авиации и космонавтики в Вашингтоне, округ Колумбия. Сам Брукс отошел от автономных насекомых и переключился на социальные взаимодействия с людьми. Вместе с аспирантами он работает над социализацией роботов.


«Путь, которым роботы и ИИ приходят в нашу жизнь, отличается от кино и нужно понять, как это происходит. Несмотря на мрачные прогнозы многих людей насчет нашего будущего, я не вижу мир без роботов. Захотят ли машины поработить нас? Стандартный сценарий: мы создаем их, они растут, мы их развиваем, они многому от нас учатся, а затем они решают, что мы довольно скучны и медленны. И они хотят взять верх над нами. Для тех, у кого есть подростки, вы понимаете, о чем я. Но Голливуд сводит это к роботам. И вопрос в том, построит ли кто-нибудь случайно робота, который захватит мир? Как если бы какой-то одинокий парень у себя на заднем дворе случайно построил Боинг 747. Я не думаю, что это случится. И я не думаю, что мы сознательно будем строить роботов, с которыми нам некомфортно. Никто не будет строить супер-плохих роботов. Перед этим они должны стать просто-плохими роботами, а перед этим не такими уж плохими. И мы не собираемся их отпускать так просто.»
Родни Брукс


На правах рекламы
Наша компания предлагает серверы в аренду для любых проектов. Создайте собственный тарифный план за несколько секунд, максимальная конфигурация бьёт рекорды — 128 ядер CPU, 512 ГБ RAM, 4000 ГБ NVMe!
ссылка на оригинал статьи https://habr.com/ru/company/vdsina/blog/530500/
Добавить комментарий